一種基于慣導信息的多普勒波束銳化圖像拼接算法
2012-01-27 07:45:08胡瑞賢劉保昌
電子與信息學報 2012年6期
關鍵詞:方法
胡瑞賢 王 彤 保 錚 劉保昌
(西安電子科技大學雷達信號處理國家重點實驗室 西安 710071)
一種基于慣導信息的多普勒波束銳化圖像拼接算法
胡瑞賢*王 彤 保 錚 劉保昌
(西安電子科技大學雷達信號處理國家重點實驗室 西安 710071)
通過多普勒波束銳化(Doppler Beam Sharpening, DBS)圖像拼接可得到大范圍的地面場景圖像。然而實際中雷達平臺的非理想運動(載機速度矢量和姿態(tài)的變化)會造成DBS圖像拼接困難。為解決此問題,該文提出了一種有效的DBS圖像拼接方法。首先利用慣導信息估計載機瞬時位置和雷達波束指向,然后將它們轉化到初始時刻定義的參考坐標系下,得到圖像校正參數(shù)。最后利用這些參數(shù),完成圖像拼接。實測數(shù)據(jù)的處理結果表明該文方法不僅較好地補償了載機運動誤差,而且與傳統(tǒng)方法相比可以更好地改善DBS數(shù)據(jù)的拼接性能。
圖像拼接;慣導;多普勒波束銳化(DBS)
1 引言
合成孔徑雷達(Synthetic Aperture Radar, SAR)通過對地面散射體進行長時間觀測獲得較高分辨率。由于觀測場景幅寬有限,不具備快速再訪能力,這種體制很難對遠距離、大范圍內的敵方目標進行監(jiān)視跟蹤。與之相比,掃描地面運動目標識別[1?3](SCAN-GMTI)采用方位掃描的工作方式,實現(xiàn)對大場景的快速覆蓋以獲取更多地面場景信息。當然這種方式需要雷達具有大的功率孔徑積,而且不可能獲得高的分辨率。盡管如此,由于其重訪率高,可以對廣域場景(如200 km×200 km)進行反復探測的優(yōu)點,還是成為了戰(zhàn)場監(jiān)視最重要的方式。例如,美國的JSTARS[4]、英國的ASTOR及歐洲五國聯(lián)合研制的SOSTAR都采用這種方式,旨在提供實時的廣域監(jiān)視和遠程目標攻擊指示能力。德國FGAN于2003年和2006年利用PAMIR系統(tǒng)進行了交通監(jiān)控等實驗也驗證了SCAN-GMTI的性能。未來,隨著天線和能源技術的發(fā)展,SCAN-GMTI模式將可能被應用到天基雷達系統(tǒng)中。
事實上,利用SCAN-GMTI模式進行廣域監(jiān)視同時可以使用 DBS技術獲得大范圍的地面場景圖像,其測繪寬度是傳統(tǒng) SAR模式難以企及的。DBS[5?7]是一種粗分辨率成像技術,它利用平臺運動導致的Doppler擴散來區(qū)分不同方向的回波實現(xiàn)比真實波束更精細的方位分辨。其前提是雷達對每一個掃描波位發(fā)射一串相干脈沖,主要處理工具是對脈沖進行處理的Doppler濾波器組。
對于每一個波位,雷達可以獲得一幅DBS的扇形圖像。將每個波位的圖像拼接起來,就可以獲得廣域圖像。因此,圖像拼接是實現(xiàn)大場景測繪的重要步驟,拼接效果好壞會直接影響地面場景觀測和后續(xù)的 GMTI性能。文獻[8]介紹了頻譜分析算法(SPECtral ANalysis, SPECAN),并分別討論了頻率間斷、方位調頻率誤差和多普勒中心頻率誤差等因素對圖像拼接的影響。文獻[9]提出了一種DBS子圖像拼接算法,該方法在脈沖重復頻率(Pulse Repetition Frequency, PRF)和脈沖積累個數(shù)M保持恒定的前提條件下,采用快速Fourier變換(FFT)對具有不同分辨率的多普勒分析的結果進行抽取,使得分辨率和數(shù)據(jù)率均保持一致,以改善圖像拼接性能。文獻[10,11]介紹了DBS多普勒中心估計算法,通過提高多普勒中心估計準確度來改善圖像拼接性能。需要指出,這些圖像拼接方法都假設載機的飛行為理想的勻速直線運動。實際上,受氣流和操控等因素影響載機平臺必然存在著運動誤差,使得不同波位的相同距離多普勒單元無法精確配準,影響圖像拼接質量。
通過慣性導航系統(tǒng)(Interial Navigation System,INS)和全球定位系統(tǒng)(Global Position System,GPS)[12,13]測量并補償運動誤差是一種可行的手段。為較好地實現(xiàn)DBS圖像拼接,本文深入分析DBS圖像拼接誤差的產生原因,采用線性空間的概念對誤差成因及其帶來的影響進行解釋,并在此基礎上提出一種基于慣導數(shù)據(jù)的圖像拼接算法。該方法最大的特點是同時考慮了載機瞬時位置和瞬時速度矢量的變化,利用慣導信息估計載機瞬時位置和雷達波束指向誤差引起的多普勒偏移,綜合兩方面因素得到圖像的校正參數(shù)。由于同時兼顧了姿態(tài)與位置的變化,可以顯著改善圖像的拼接性能;另外,采用遞推方法明顯降低了具體算法的運算量。需要強調的是,以往國內外研究 DBS圖像拼接的文獻很少,即使有討論拼接問題的,如文獻[8-11]由于波位數(shù)往往較少(一般只有幾十個波位),載機運動誤差造成的拼接困難較小,在拼接過程沒有考慮“誤差”。而當波位較多(一般幾百甚至上千個波位)時,載機誤差造成的影響不能忽略,本文方法可以較好地估計并補償載機運動誤差,實現(xiàn)多個波位的DBS圖像拼接。總之,不論從理論還是工程實現(xiàn)角度,本文方法都具有重要的應用價值。
2 DBS成像原理
DBS利用雷達平臺運動導致的Doppler擴散來分辨不同方向的回波,以獲得比真實波束更精細的方位分辨能力。如圖1所示,假設載機以恒定高度H平行于地面勻速飛行,其飛行方向為X軸,垂直于X方向的平面在水平地面的交線為Y軸,豎直方向定義為Z軸。雷達天線沿正側面放置,由于載機運動,波束指向不同場景中的雜波多普勒頻率是不同的,其計算公式如下:
圖1 機載雷達與地面散射體的關系


通過改變雷達波束指向對地面不同場景進行觀測可獲得大場景的DBS圖像。相控陣雷達的工作過程比較靈活和自由,雷達操縱員通過顯示控制臺可以任意確定雷達的搜索空域、波束指向和工作方式。其基本工作過程如下[15],信號產生器產生指定的低功率信號,該信號經(jīng)固態(tài)放大鏈初步放大后,再經(jīng)饋線網(wǎng)絡分配到每個T/R組件的輸入端;T/R組件對信號進行移相并進一步放大后,由天線系統(tǒng)向波束控制分系統(tǒng)指定的方向進行輻射;同時,天線把來自該方向的回波信號送到T/R組件進行放大后,送到接收分系統(tǒng)。圖2中,每個掃描角波束的駐留位置稱為一個波位,本質上表示的是雷達波束對空間的離散采樣。
3 DBS圖像拼接原理

圖2 雷達天線掃描示意圖
上面的分析中假設載機勻速直線飛行,實際上載機的運動狀況不可能是理想的,機載SAR,特別是中、低空飛行的機載SAR,由于氣流不穩(wěn)定的影響,運動的不穩(wěn)定性較大,如果不采取運動補償,則雷達錄取的數(shù)據(jù)會有一定程度的失真,導致成像質量下降。載機受氣流影響產生顛簸主要表現(xiàn)在兩個方面[16]:一方面是載機的位置;另一方面是載機的姿態(tài)(包括偏航、俯仰和橫滾等)。位置誤差主要影響天線相位中心的位置,姿態(tài)變化則會影響雷達波束指向。圖3給出了運動誤差對圖像拼接的影響。假設某一時刻,理論上雷達天線的波束指向如圖 3中虛線所示,由于載機的位置和姿態(tài)發(fā)生變化,該時刻波束實際指向為圖3中粗黑色波束所指的區(qū)域(類似模型亦可見圖2)。此時,不僅載機的實際位置偏離理想航線,姿態(tài)誤差也導致其波束照射區(qū)域與理想情況存在差異。若直接根據(jù)公式(2)將多個波位掃描結果拼接起來必然會帶來嚴重誤差,必須要借助慣性導航系統(tǒng)(以下簡稱慣導)和GPS等測得的載機實際運動情況對雷達回波數(shù)據(jù)進行補償。

圖3飛行路線扭曲時雷達波束指向示意圖
慣導[12,13]可以提供運動載體的位置、速度、航向和姿態(tài)角等信息。它具有數(shù)據(jù)更新率高、短期精度高和穩(wěn)定性好的優(yōu)點。不足之處在于,當單獨使用時定位誤差隨時間積累,實際使用中有必要就慣導誤差的影響進行分析,本文實驗部分進行了討論。
根據(jù)上面的討論,本文分兩步補償運動誤差,第1步計算任一時刻載機的瞬時位置,第2步計算該時刻雷達波束照射范圍內各地面散射體相對于初始時刻的對應坐標。
3.1 計算載機的瞬時位置
圖4 載機瞬時位置的離散示意圖

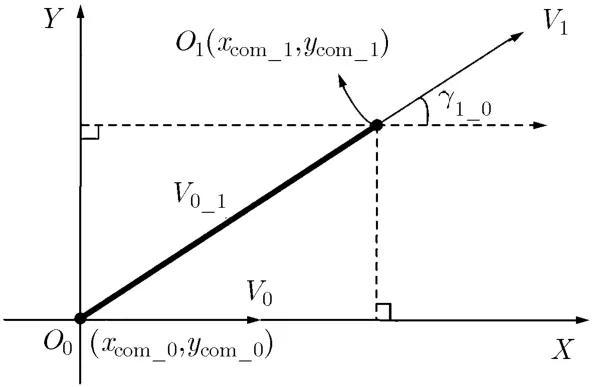
圖5 O0和O1時刻載機幾何關系局部圖

3.2 計算目標精確坐標
上面介紹了利用偏轉角γi_0估計載機瞬時位置的方法,事實上這個角度更重要的作用是對波束指向進行校正以獲得地面散射體的真實坐標。為討論簡單,將圖3的模型向z=0平面投影得到圖6。初始t0時刻,載機從O點沿X軸方向飛行,陣面法線指向為Y方向;ti時刻載機實際位置為Oi,受氣流影響航線偏離X軸,其實際飛行方向Xi軸與初始時刻X軸之間的夾角也為γi_0,相應的陣面法線指向為Yi。補充說明,由于載機在Z方向存在顛簸,XOY平面與XiOiYi平面應該存在空間夾角,此處為簡化處理,認為載機飛行高度保持恒定,即Z方向顛簸很小可以忽略,這種假設與實際慣導測量結果也是吻合的。
以上模型可以從線性空間角度來理解。將t0時刻的XOY平面記為線性空間V0,向量O0X和O0Y為該線性空間中的一組線性無關的正交基,記為和 ,則

圖6 運動軌跡旋轉扭曲導致的坐標軸旋轉

4 圖像拼接算法

(5)讀入第ti+1時刻數(shù)據(jù)和慣導信息,重復以上步驟,直到所有波位數(shù)據(jù)全部處理結束。
5 實測數(shù)據(jù)處理結果
下面以一組X波段SCAN-GMTI數(shù)據(jù)為例來驗證本文的基于慣導補償?shù)?DBS圖像拼接算法的性能。本節(jié)首先就慣導精度對于DBS圖像拼接的影響進行分析,接著分別給出傳統(tǒng)方法和本文方法的DBS圖像拼接結果并進行比較。雷達系統(tǒng)工作在X波段,信號帶寬約為20 MHz,方位向3個接收天線,相鄰天線間距為0.4 m,載機速度約為120 m/s,場景中心距離 50 km,脈沖個數(shù) 128,波束掃描范圍-30°~+30°,俯仰角 4°。
上面的分析中并未考慮慣導誤差的影響,換言之采用本文方法對實測數(shù)據(jù)進行處理時假設載機慣導參數(shù)是精確的,這在實際情況中幾乎是不可能的。由于慣導是一個時間積分系統(tǒng),其重要組成部件陀螺儀和加速度計(它們分別用來檢測運動載體在慣性空間中的角運動和線運動)存在誤差將導致慣導的導航誤差隨時間積累。因此在介紹本文的DBS圖像拼接結果之前有必要就慣導精度對 DBS圖像拼接的影響進行分析說明。本節(jié)首先用實測慣導數(shù)據(jù)進行仿真試驗驗證慣導精度對圖像拼接的影響,然后用本文方法處理實測數(shù)據(jù)以驗證該方法的性能。
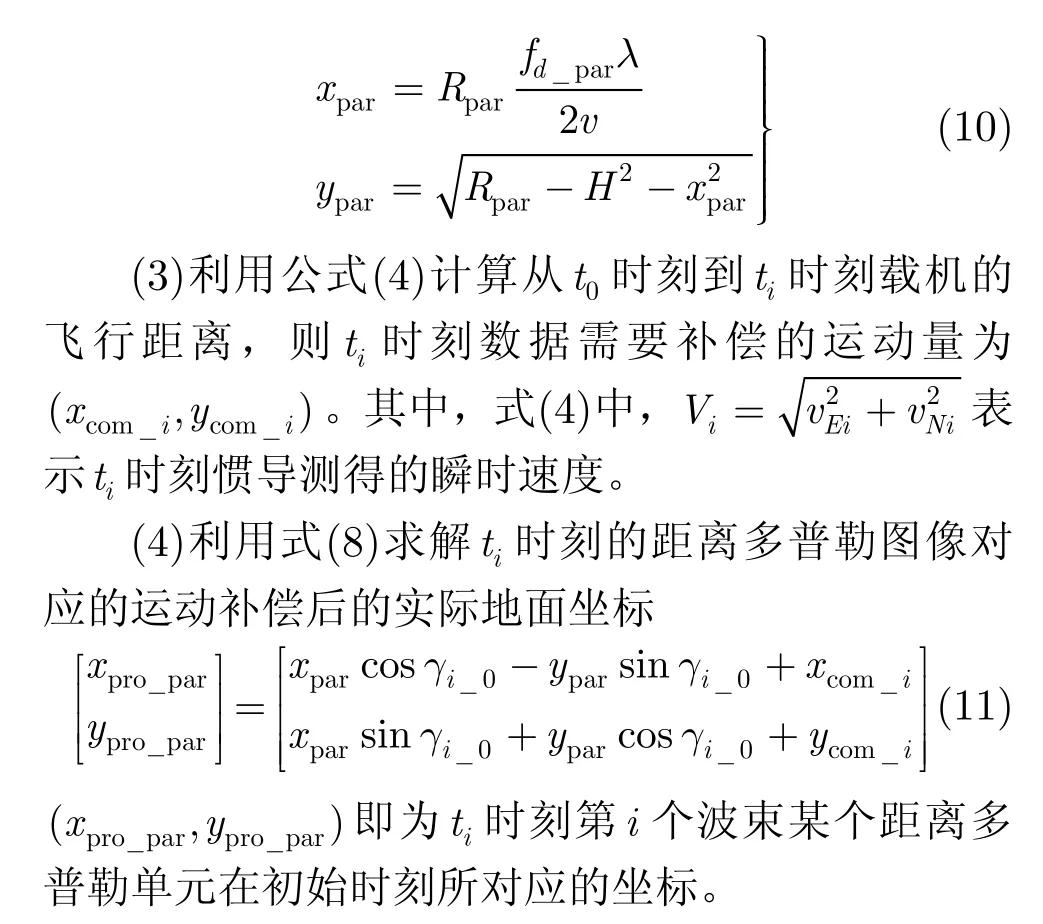
通常,隨機漂移率為0.015°/h(相當于地球自轉角速率的 0.1%)的陀螺儀,精度可以滿足一般慣導要求(位置誤差1 n mile/h)。實踐中,常用0.01°/h來表征慣性級陀螺儀的最低精度。對式(8)進行推導,得到由慣導誤差引起的圖像拼接誤差的計算公式

圖7表示慣導誤差對運動補償?shù)挠绊憽F渲校?表示不考慮慣導誤差時某地面散射點的位置(作為相對參考點),·表示慣導存在精度誤差和隨機漂移時的該散射點的隨機分布(圖 7(a)-圖 7(c)均仿真了1000點)。在仿真時,假設慣導精度誤差服從高斯分布。另外,由于載機飛行時間較短,認為隨機漂移率隨時間線性變化。圖 7(a)表示慣導精度為 10?5,隨機漂移率為0.01°/h,圖7(d)為圖7(a)右上角點跡的局部放大圖(另外 3個方向的點跡與此類似),圖7(b)慣導精度為 10?5,隨機漂移率為 0.015°/h,圖7(e)為圖7(b)右上角點跡的局部放大圖(另外3個方向的點跡與此類似),圖7(c)表示慣導精度為 10?3,隨機漂移率為0.015°/h的散射點隨機分布。由于慣導隨機漂移方向未知,圖中的隨機點列均形成4條點跡。理論上講,這與實際情況不吻合,但這些點跡近似呈對稱分布,并不影響我們的分析結果。在圖 7(a)-圖7(c)中以*為圓心,距離分辨率為半徑做圓,圓內部的點均位于一個分辨單元內,表明存在慣導誤差時,目標坐標的計算結果依然是準確的,即此時慣導精度對圖像拼接影響可以忽略。但是由圖 7(c)可以看出部分隨機實驗結果出現(xiàn)在了圓外,表明此時慣導精度對系統(tǒng)的影響是需要考慮的,即目標坐標的結果是存在誤差的。由于本文所采用的慣導實測數(shù)據(jù)的精度為 10?5,隨機漂移率為0.015°/h,與圖7(c)的情況吻合,因此采用本文方法進行圖像拼接時可以忽略慣導誤差對圖像拼接的影響。
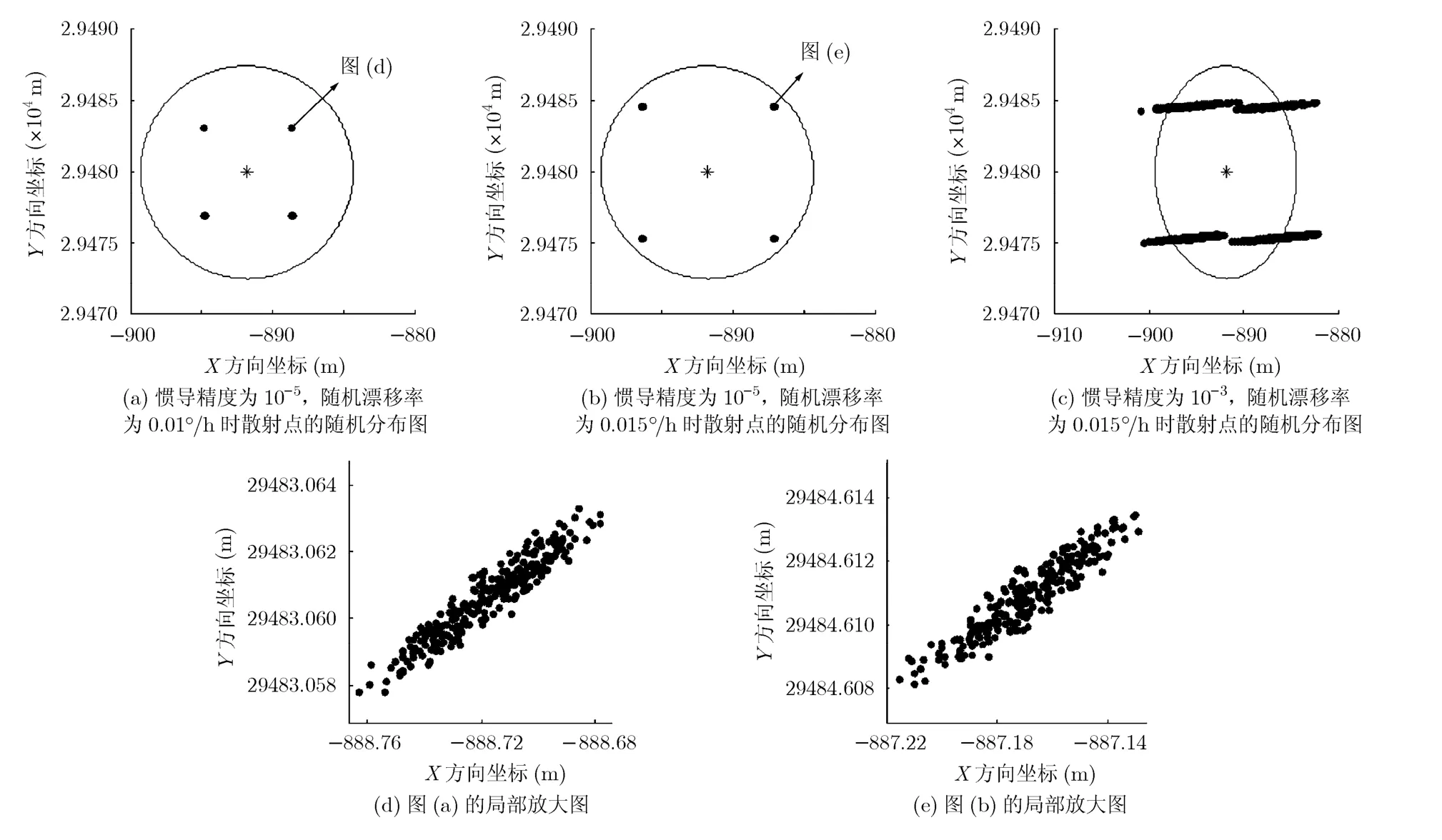
圖7 慣導誤差對分辨率的影響
為了與本文方法進行比較,首先給出一種未進行運動補償采用SPECAN方法得到的DBS圖像拼接結果,如圖8(a)所示。直觀上講,這幅DBS場景圖像主要存在以下問題:圖像中一些特顯點如橋梁、公路等由于拼接誤差在水平方向存在偏移不能重合,最多偏移十幾個單元,由此導致圖像出現(xiàn)嚴重的模糊和重影等問題,這樣的處理結果顯然很不理想,且不利于后續(xù)的目標定位精度要求。原因在于,這種傳統(tǒng)方法在補償運動誤差時,只是從整體上沿某個方向補償了一個平移量,忽略了載機運動的非理想性;其次從另一個角度,根據(jù)系統(tǒng)參數(shù),即使按照每秒100 m的速度來估計,掃描1 min內載機的移動距離也有將近6千米,原始的假設已經(jīng)明顯不適用了,必須要采用更加精確的補償算法。
圖8(b)是采用本文方法對數(shù)據(jù)進行運動補償后,將多次掃描數(shù)據(jù)拼接起來獲得的處理結果。與圖8(a)相比,圖中一些典型的地形地貌特征和重要場景(如溝壑、橋梁、高速公路等)比較明顯;這樣的場景性能顯然有利于后續(xù)的運動目標定位。總之,實際處理結果與理論分析非常吻合,表明本文方法對于改善多次掃描的DBS圖像結果具有廣泛的適應性及重要的實用價值。
6 結論
針對多次掃描的 DBS圖像拼接時存在的重影等現(xiàn)象,本文在深入分析問題成因的基礎上提出了一種基于慣導數(shù)據(jù)的DBS圖像拼接方法,充分利用慣導提供的信息,補償載機位置和姿態(tài)變化對實測數(shù)據(jù)的影響,取得了明顯效果;另外由于實現(xiàn)方法簡單,在并未明顯增加運算量的前提下,多個波位DBS圖像的拼接結果得到明顯改進。
圖8 DBS圖像拼接結果
[1] Guttrich G L and Sievers W E. Wide area surveillance concepts based on geosynchronous illumination and bistatic UAV or satellite reception[C]. IEEE Aerospace Conference Proceedings, Aspen, CO, 1997: 171-180.
[2] Cerutti-Maori D, Klare J, Brenner A R,et al.. Wide-area traffic monitoring with the SAR/GMTI system PAMIR[J].IEEE Transactions on Geoscience and Remote Sensing, 2008,46(10): 3019-3030.
[3] Zou Bo, Zhen Dong, and Liang Dian-nong. Research on Scan-GMTI technology of airborne MIMO radar based on STAP[C]. ICSP 2010 Processding, Beijing, Oct. 24-28, 2012,1973-1976.
[4] Entzminger J N, Fowler C A, and Kenneally W J.JointSTARS and GMTI: past, present and future[J].IEEE Transactions on Aerospace and Electronic Systems, 1999,35(2): 748-761.
[5] 趙宏鐘, 謝華英, 周建雄, 等. 勻加速運動平臺下的大斜視DBS成像方法[J]. 電子學報, 2010, 38(6): 1280-1286.
Zhao Hong-zhong, Xie Hua-ying, Zhou Jian-xiong,et al..High squint DBS imaging based on constant acceleration movement platform[J].Acta Electroinca Sinca,2010, 38(6):1280-1286.
[6] 劉凡, 趙鳳軍, 鄧云凱, 等. 一種基于最小二乘直線擬合的高分辨率 DBS成像算法[J]. 電子與信息學報, 2011, 33(4):787-791.
Liu Fan, Zhao Feng-jun, Deng Yun-kai,et al.. A new high resolution DBS imaging algorithm based on least squares linear fitting[J].Journal of Electroincs&Information Technology, 2011, 33(4): 787-791.
[7] Long Teng, Lu Zheng, Ding Zegang,et al.. A DBS Doppler centroid estimation algorithm based on entropy minimization[J].IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3703-3712.
[8] Cumming I G and Wong F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M].Norwood, MA, Artech House, 2004: 369-399.
[9] 劉寅. 掃描方式下DBS子圖像拼接算法[J]. 雷達科學與技術,2005, (2): 91-95.
Liu Yin. Combination algorithm for DBS sub-image in scanning mode[J].Radar Science and Technology, 2005, (2):91-95.
[10] 左磊, 李明, 張曉偉. DBS多普勒中心無模糊估計新方法[J].西安電子科技大學學報, 2011, 38(5): 196-203.
Zuo Lei, Li Ming, and Zhang Xiao-wei. Doppler centroid estimation without ambiguity in DBS[J].Journal of Xidian University, 2011, 38(5): 196-203.
[11] 萬紅進, 李輝. DBS多普勒質心估計算法研究[J]. 火控雷達技術, 2010, 39(2): 37-40.
Wan Hong-jin and Li Hui. Study on DBS Doppler centroid estimation algorithm[J].Fire Control Radar Technology, 2010,39(2): 37-40.
[12] Farrell J and Barth M. The Global Positioning System and Inertial Navigation[M]. NY, McGraw Hill, 1999: 217-273.
[13] 李躍. 導航與定位-信息化戰(zhàn)爭的北斗星[M]. 北京: 國防工業(yè)出版社, 2008: 384-446.
Li Yue. Navigation and Positioning-the Big Dipper in Information War[M]. Beijing: National Defense Industry Press, 2008: 384-446.
[14] 吳順君, 梅曉春. 雷達信號處理和數(shù)據(jù)處理技術[M]. 北京:電子工業(yè)出版社, 2008: 135-139.
Wu Shun-jun and Mei Xiao-chun. Radar Signal Processing and Data Processing Technology[M]. Beijing: Press of Electronic Industry, 2008: 135-139.
[15] 賁德, 韋傳安, 林幼權. 機載雷達技術[M]. 北京: 電子工業(yè)出版社, 2006: 170-200.
Ben D, Wei C A, and Lin Y Q. Airborne Radar Technology[M]. Beijing: Press of Electronic Industry, 2006: 170-200.
[16] 保錚, 邢孟道, 王彤. 雷達成像技術[M]. 北京:電子工業(yè)出版社, 2005: 185-195.
Bao Z, Xing M D, and Wang T. Radar Imaging Technology[M]. Beijing: Press of Electronic Industry, 2005:185-195.
A Novel Algorithm for Stitching Doppler Beam Sharpening Images Based on INS Information
Hu Rui-xian Wang Tong Bao Zheng Liu Bao-chang
(Key Lab. of Radar Signal Processing,Xidian University,Xi’an710071,China)
By stitching Doppler Beam Sharpening (DBS) images together, a wide swath ground image is obtained.In practice, however, there are some difficulties in stitching due to the nonideal movement (variation of the velocity vector and the attitude) of the radar platform. To deal with these problems, a novel method is proposed, which can stitch the DBS images effectively. The Interial Navigation System (INS) information is employed to estimate the instantaneous position of the aircraft and the radar beam direction, both of which are then transformed to the original reference coordinate so that the corrected parameters of the image can be obtained. Finally, by using these parameters, the image stitiching is achieved. Processing results of measured data show that the proposed method not only compensates the motion error excellently, but also significantly outperforms the traditional algorithm in stitching performance.
Image stitching; Interial Navigation System (INS); Doppler Beam Sharpening (DBS)
TN957.52
A文章編號:1009-5896(2012)06-1337-07
10.3724/SP.J.1146.2011.01019
2011-09-29收到,2011-12-29改回
國家自然科學基金(60872140)資助課題
*通信作者:胡瑞賢 hu12rui3@yahoo.com.cn
book=6,ebook=272
胡瑞賢: 男,1984年生,博士生,研究方向為 SAR-GMTI、廣域GMTI和空時自適應信號處理.
王 彤: 男,1974年生,教授,博士生導師,現(xiàn)從事信號與信息處理的研究工作,特別是針對雷達探測方向的陣列信號處理、包括空時二維自適應處理、雷達成像和地面動目標檢測等.
保 錚: 男,1927年生,教授,博士生導師,中國科學院院士,從事雷達系統(tǒng)和信號處理的教學和研究工作,研究面涉及自適應信號處理、陣列信號處理、非線性信號處理、雷達成像和目標識別等雷達信號處理的重要領域.
劉保昌: 男,1981年生,講師,研究方向為 SAR-GMTI、廣域GMTI和雙基SAR成像.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56