沖壓發動機導彈爬升軌跡與推力調節規律優化
2012-03-03 06:17:44尚騰谷良賢趙吉松龔春林
飛行力學 2012年3期
尚騰,谷良賢,趙吉松,龔春林
(西北工業大學航天學院,陜西西安 710072)
引言
沖壓發動機導彈的彈道設計不同于固體火箭發動機導彈的彈道設計,主要體現在沖壓發動機推力與彈道的強耦合性。一方面,沖壓發動機的內部參數和性能指標隨導彈的飛行速度、飛行高度、攻角及實際進入發動機的空氣流量而變化;另一方面,沖壓發動機的比沖及推力直接影響導彈的質量和飛行性能。所以,在設計以沖壓發動機為動力的導彈彈道時必須考慮推力調節規律的設計[1]。沖壓發動機的推力調節多采用控制余氣系數的方法,其特點是實現方便且有利于保證沖壓發動機燃燒的穩定性[2]。
以沖壓發動機為動力的超聲速、中遠程戰術導彈,通常用助推器將導彈加速到達預定的高度和速度,沖壓發動機再接力工作,將導彈加速到規定的巡航速度和巡航高度進行巡航飛行。爬升彈道的設計優化需要解決如何最優地使導彈從接力點(沖壓發動機開始工作)爬升到巡航狀態。文獻[3-4]在進行沖壓發動機導彈爬升彈道優化的研究中,余氣系數只根據導彈飛行馬赫數進行了適當調節,并沒有參與優化。而沖壓發動機導彈爬升過程中飛行速度、高度、導彈姿態等均在較大范圍內變化,只有把沖壓發動機的推力調節規律和導彈彈道設計協調起來,進行一體化優化設計,才能獲得合理的結果。
直接法對目標函數的解析性質不作苛刻要求,且適合各種精度的彈道模型,本文采用直接法求解沖壓發動機導彈爬升這一最優控制問題,建立了爬升軌跡與推力調節規律共同參與優化的一體化優化設計模型。為了克服直接法對初始點選取敏感,容易收斂到局部最優解的缺點,將粒子群算法(PSO)與變尺度算法(BFGS)串聯結合,尋優前期利用PSO較強的全局搜索能力,搜索至全局最優點附近;尋優后半階段利用BFGS較強的局部尋優能力,以提高搜索精度。設計結果表明,本文提出的爬升彈道一體化設計方法能夠成功地求解沖壓發動機爬升彈道問題,具有較好的工程應用價值。
1 數學模型
1.1 爬升彈道運動模型
將導彈看作可控質點,導彈在鉛垂平面內的運動方程組為:
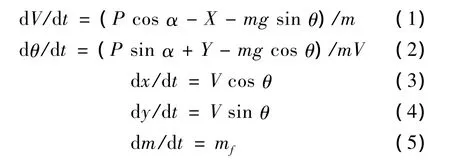
式中,V為導彈速度;P為推力;m為導彈質量;X為阻力;Y為升力;α,θ分別為攻角和彈道傾角;x為縱向射程;y為高度;mf為發動機燃料消耗率。
設沖壓發動機導彈的爬升彈道光滑且二階連續,則可用三次樣條曲線插值擬合其爬升軌跡。下面推導導彈按照預設飛行軌跡y*(x)飛行時的需用攻角。
由式(3)、式(4)可得:
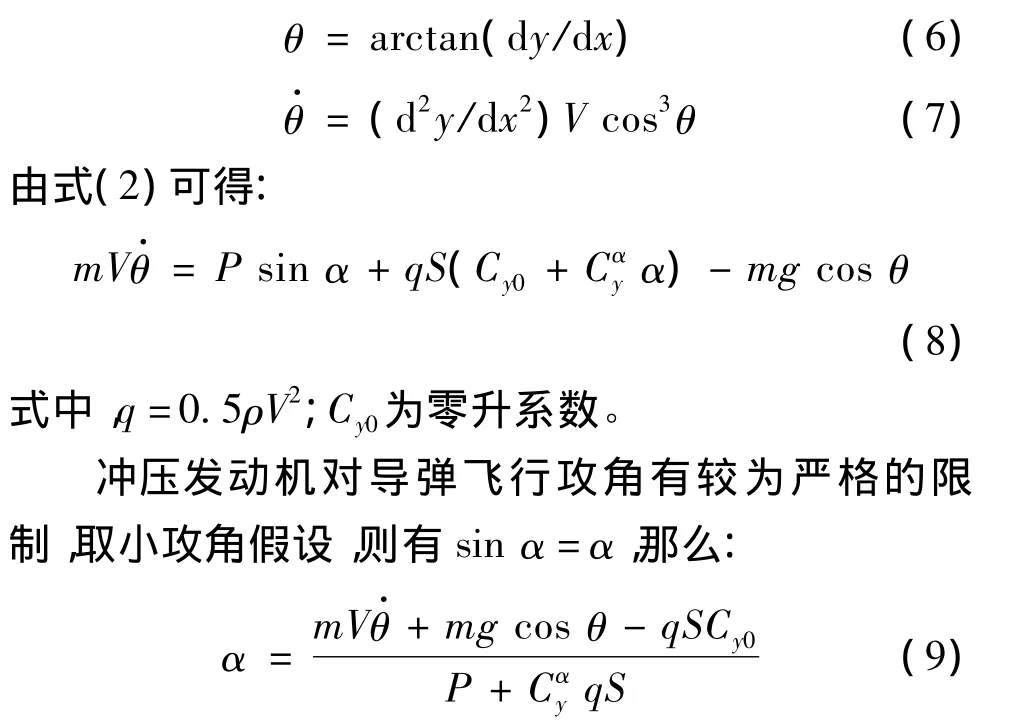
給定導彈爬升飛行的預設飛行軌跡y*(x),則可以利用式(6)~式(9)求出按此軌跡飛行時的需用攻角。
對式(1)~式(5)進行積分求解,飛行攻角取需用攻角,即可得到導彈的實際飛行彈道y(x)。其中,沖壓發動機的性能隨導彈的飛行速度、飛行高度、迎角及實際進入發動機的空氣流量而變化。
1.2 沖壓發動機推力模型及推力調節規律
沖壓發動機的推力計算公式為:

式中,ma為空氣流量;ve為發動機噴口氣流速度;v為飛行器速度;pe為噴口壓強;pa為環境壓強;αf為余氣系數,αf=ma/(Lmf);L為單位燃料消耗的理論空氣量。
以某頭部進氣沖壓發動機為例,采用一元流理論,得到沖壓發動機的推力、燃料秒流量隨飛行高度、馬赫數、攻角及余氣系數的變化關系[2],即:

式中,f1,f2以插值表的形式給出。發動機的推力調節就是通過調節供油量,控制余氣系數按照所需的規律進行變化。
2 優化問題表達與優化算法
2.1 優化問題描述
以沖壓發動機為動力的導彈爬升段設計優化的目標是使導彈達到巡航高度并以巡航馬赫數飛行,且要求燃料消耗量少,飛行時間短。時間最短和燃料最省是兩個相互矛盾的彈道優化目標[4],本文研究燃料最省的情況。
彈道優化的初始條件是給定的接力點位置、接力馬赫數;終端約束為給定的巡航高度、彈道傾角(0°)、最小巡航馬赫數;在導彈爬升過程中有最大攻角的限制。彈道優化的目標函數和約束條件的數學描述為:
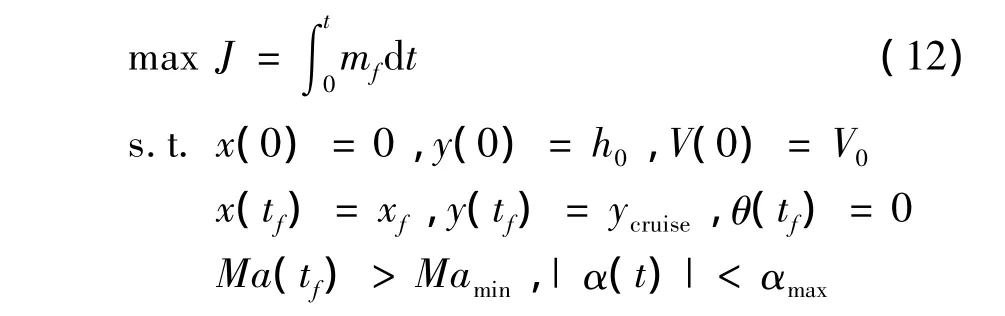
式中,ycruise,Mamin為給定的巡航高度和最小巡航馬赫數。
2.2 彈道樣條離散
在三次樣條曲線中,兩個節點之間的曲線由三次多項式擬合生成,整個樣條曲線由各段三次多項式曲線組成,相鄰兩段在節點處二階連續。本文構造三次樣條時采用自然邊界條件,即兩端點處的二階導數為零。采用三次樣條插值方法可以對彈道優化這一最優控制問題進行離散并參數化[5-6]。
將彈道沿射程x分為n段,形成n+1個節點[x0,x1,…,xn],優化變量為各節點處的飛行軌跡縱坐標yi和余氣系數αfi(i=0,1,…,n)。通過樣條插值,可構建出導彈在豎直平面內的軌跡y*(x)和余氣系數變化規律α*f(x)。
2.3 PSO-BFGS串聯優化方法
PSO算法有著較強的全局搜索能力,但局部搜索能力較差,搜索精度不夠高[7]。BFGS變尺度法是求解無約束優化問題最有效的算法之一,搜索精度較高,數值穩定性好。結合兩者優點,將PSO算法與BFGS算法串聯形成PSO-BFGS優化算法。
PSO算法首先在可行解空間和速度空間隨機初始化粒子群(Particle Swarm),即確定粒子(Particle)的初始位置和初始速度。其中,位置用于表征問題解。設d維搜索空間中的第i個粒子的位置和速度分別表示為 xi= [xi,1,xi,2,…,xi,d]和 vi= [vi,1,vi,2,…,vi,d]。通過評價各粒子的適應度值,確定每個粒子所經 過 的最佳位置 pi= [pi,1,pi,2,…,pi,d],以及群體所發現的最佳位置 pg= [pg,1,pg,2,…,pg,d],再按下式更新各粒子的速度和位置:
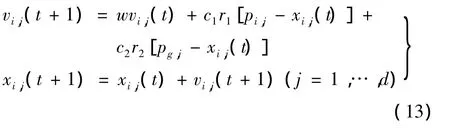
式中,w為慣性權重因子;c1和c2為正的加速常數;r1和r2為在0~1之間均勻分布的隨機數。
設粒子的速度區間為[vmin,j,vmax,j],位置范圍為[xmin,j,xmax,j],當粒子速度超出限制時取邊界值。位置超出范圍時,按下式確定[8]:
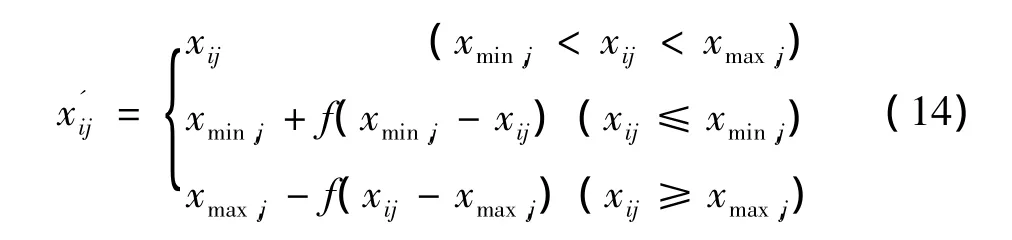
式中,f為彈性因子(0≤ f≤1),表示粒子在超出邊界時,被彈回到可行解空間內的強弱程度。采用此式有利于求解最優解在邊界附近的問題。
BFGS的基本思想為[8]:迭代過程中,在 x(k+1)處按下式生成對稱正定矩陣Hk+1,以代替海森矩陣的逆陣:
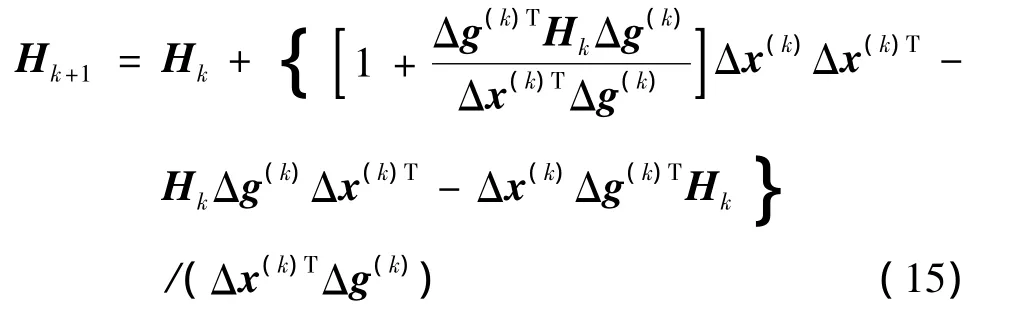
式中,g(k)=▽ f(x(k)),由中心差分格式給出;Δg(k)=g(k+1)- g(k);Δx(k)=x(k+1)- x(k)。然后,以p(k+1)= -Hk+1g(k+1)為x(k+1)處的搜索方向進行搜索。BFGS對一維搜索算法精度要求較高,文中采用三次曲線擬合法[8]。
PSO-BFGS串聯混合算法的優化流程如圖1所示。
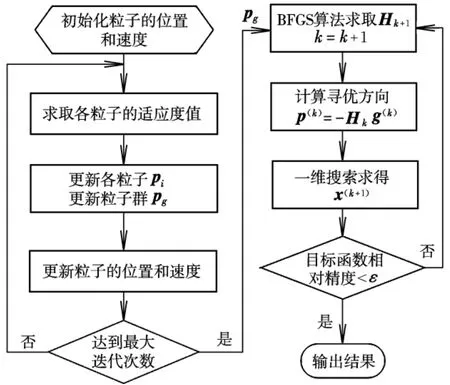
圖1 PSO-BFGS算法流程圖
針對爬升彈道的末端約束,通過在適應度函數中增加懲罰函數來處理。適應度函數選為:

式中,cy,cθ,cMa分別為終端高度、彈道傾角和速度的懲罰系數。則爬升彈道優化問題轉換為無約束優化問題,可由PSO-BFGS混合算法尋優求解。
3 設計實例
采用上述彈道優化方法對沖壓發動機導彈的爬升彈道進行優化。算例設計參考了文獻[1]和文獻[3],主要計算條件為:接力點馬赫數2.2,接力點高度2 km,巡航高度15 km,終點彈道傾角0°,終點馬赫數大于2.4,爬升終點距接力點的水平距離為25 km。為了觀察軌跡與推力調節一體化設計在節省燃料方面的貢獻,本文對以下兩種方案進行了優化。
方案1:僅爬升軌跡參與彈道優化,余氣系數變化規律預先設定為:
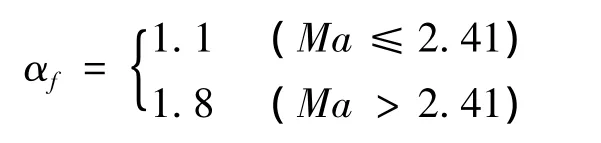
此方案類似文獻[3-4]中采用的方案。
方案2:爬升軌跡和余氣系數都參與彈道優化,即前文提出的一體化設計方案。
方案1中,彈道采用6個節點作為控制點,沿x向均勻分布,y1取 2 000.0,y2~ y5∈[2 000.0,15 000.0],y6∈[14 500.0,15 500.0]。方案 2 中,彈道離散同方案1,余氣系數離散控制點也取6個,沿 x向均勻分布,αf1取0.9,αf2~ αf6∈[0.9,2.0]。方案2的優化問題規模是方案1的2倍,圖2給出了方案2的求解收斂過程。可以看出,PSO尋優前期,適應度值(J1)迅速下降,更新n=40代以后,適應度值就無明顯改進,收斂至37.536 0;BFGS方法經過23次迭代,收斂至35.149 7,較PSO算法的優化結果提高6.36%。優化求解得到的兩種方案的爬升軌跡和飛行參數見圖3~圖6。
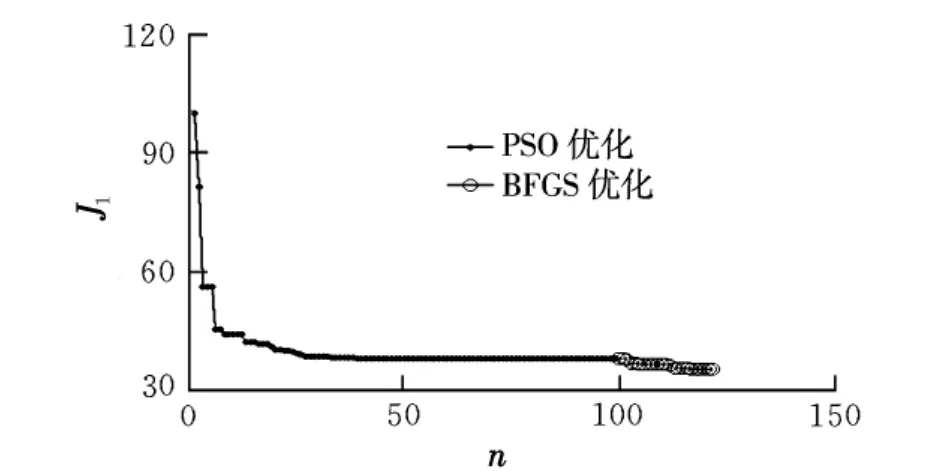
圖2 方案2的求解收斂過程
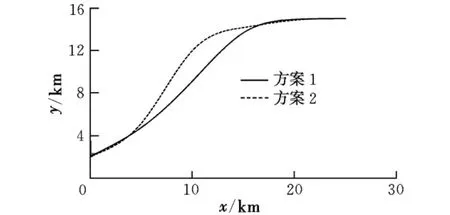
圖3 兩種方案最優爬升彈道
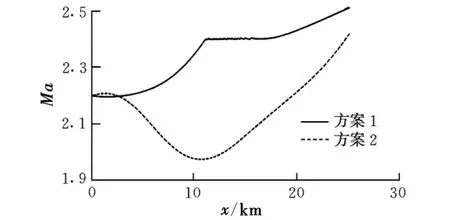
圖4 爬升中馬赫數變化
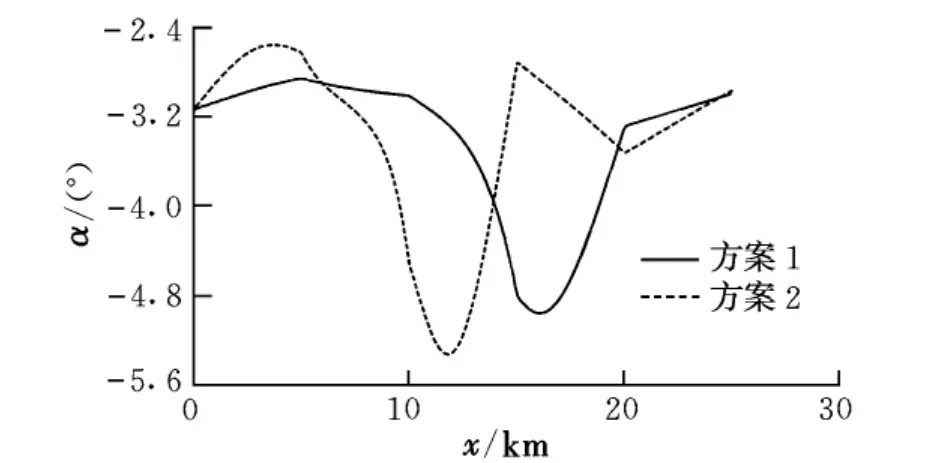
圖5 爬升中攻角變化
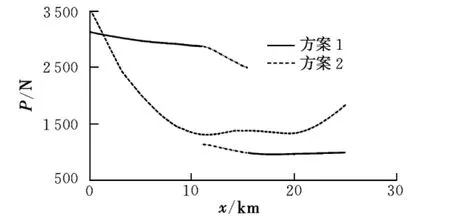
圖6 爬升中推力變化
圖6方案1曲線中點劃線表示:推力值在導彈飛行馬赫數接近2.41時出現震蕩。兩種方案爬升飛行的末端參數及飛行過程中的攻角絕對值的最大值見表1。
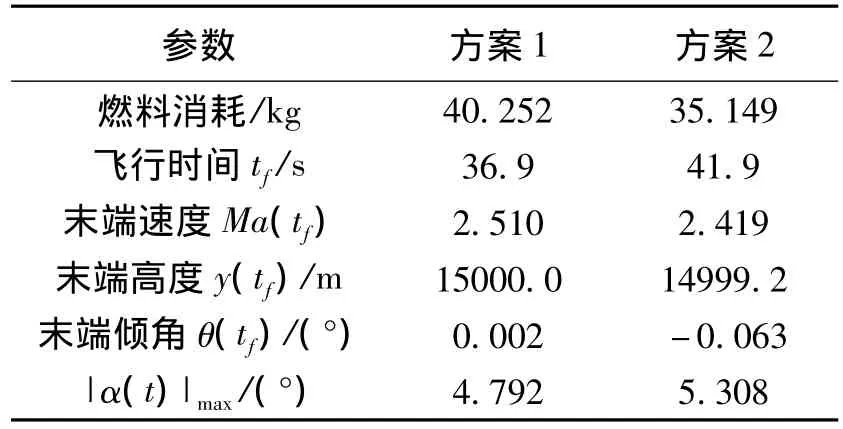
表1 兩種方案的優化結果比較
仿真結果顯示,兩種設計方案的設計結果均達到了設計要求。方案2中,爬升過程總消耗燃料量為35.149 3 kg,比方案 1 減少 5.102 4 kg,減少了12.68%,爬升時間增加5.0 s。燃料消耗的減少對于減少導彈發射質量或增加導彈的射程是十分有意義的,且接力爬升段在沖壓發動機的整個飛行過程中所占比例較小,爬升段時間的少量增加是可以接受的。
對比兩種方案下的爬升彈道:在爬升前半段,方案1中導彈作加速爬升飛行,速度已達到末端速度要求;方案2通過優化余氣系數,使導彈作減速爬升飛行。在爬升后半段,方案1中,導彈速度略有增加;而方案2中,導彈呈加速飛行狀態,由于導彈已經接近平飛高度,加速效率高。可見,采用方案2,導彈以較小的平均飛行速度完成爬升過程,可以實現節省燃料,進而達到減小導彈發射質量或增加射程的目的。
4 結束語
本文采用直接法建立了飛行軌跡形狀和推力調節規律共同參與優化的沖壓發動機導彈的爬升彈道一體化優化模型,并采用PSO-BFGS混合算法進行求解。優化結果表明:采用樣條插值直接離散方法和PSO-BFGS混合算法能夠較好地求解沖壓發動機導彈爬升彈道優化問題。在沖壓發動機導彈爬升彈道設計優化中,推力調節規律與爬升軌跡一體化優化設計,可獲得先減速再加速的爬升方案,采用此方案,導彈能以較小的平均速度完成爬升過程,可以顯著節省燃料,提高導彈性能。
[1] 劉恒軍,沙建科,王華.沖壓發動機導彈彈道多目標優化[J].系統仿真學報,2009,21(9):2764-2766.
[2] 劉興洲,于守志.飛航導彈動力裝置(上)[M].北京:宇航出版社,1992.
[3] 王華,楊存富,劉恒軍.沖壓發動機為動力導彈爬升彈道優化[J].彈箭與制導學報,2008,28(3):185-188.
[4] 王華,楊存富,劉恒軍.以沖壓發動機為動力的導彈爬升彈道研究[J].現代防御技術,2008,36(4):27-30.
[5] 陳勝琪.基于樣條曲線的機動彈頭再入軌跡優化研究[J].飛行力學,2009,27(1):63-65.
[6] Ken Cote.Complex 3D flight trajectory generation and tracking using cubic splines[C]//AIAA’s 1st Technical Conference and Workshop on Unmanned Aerospace Vehicles.Portsmouth,USA,2002.
[7] Rhonald M J,Roy J H.Hybrid particle swarm-pattern search optimizer for aerospace propulsion applications//46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit.Nashville,USA,2010.
[8] 粟塔山.最優化計算原理與算法程序設計[M].長沙:國防科技大學出版社,2001.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
