基于任務安全性的亞軌道飛行器返回軌跡優化
2012-03-03 06:17:46王文虎李新國
飛行力學 2012年3期
關鍵詞:優化
王文虎,李新國
(西北工業大學航天學院,陜西西安 710072)
引言
對于可重復使用的亞軌道飛行器(Suborbital Launch Vehicle,SLV)返回段而言,首要任務就是能夠安全返回地面。因而,從安全性角度出發,進行返回軌跡優化是非常必要的。文獻[1-2]提出的方法都對動力學模型進行了降階處理,雖然簡化了返回問題的復雜性、加快了軌跡生成的速度,但文獻[3]指出模型降階處理會降低任務的安全性。
本文針對亞軌道飛行器,采用高斯偽譜法進行了基于任務安全性的返回軌跡優化研究,并驗證了可行性與最優性。為了增加任務的安全性,動力學模型考慮地球旋轉影響;為了滿足實際控制能力約束,利用偽控制量作為控制變量;在考慮終端約束及性能指標時引入“末端進場走廊”(Final Approach Corridor,FAC),摒棄了傳統再入分段、末端區域能量管理(TAEM)段、航向校正圓錐(HAC)等概念,實現了從初始狀態到自動著陸界面全程軌跡優化。
1 高斯偽譜法
近年來,隨著計算機技術的快速發展、求解大規模稀疏非線性規劃問題(NLP)算法的逐步成熟和偽譜法的出現,為快速、準確地進行飛行器軌跡優化提供了有效途徑。
偽譜法是一種正交配點法,因其求解精度高、收斂速度快、具有很好的魯棒性而備受關注[4]。常見的偽譜法包括:勒讓德偽譜法(LPM)、拉道偽譜法(RPM)和高斯偽譜法(GPM)。Huntington[4]對三種偽譜法在精度和計算效率等方面進行了比較,結果表明高斯偽譜法具有更高的求解精度和收斂速度,并且在處理含初始和終端約束的問題上具有優勢。高斯偽譜法基本原理如圖1所示。
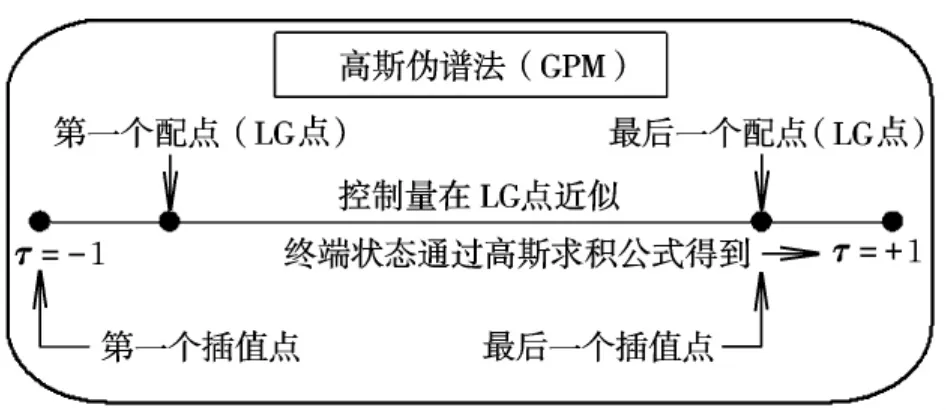
圖1 高斯偽譜法基本原理示意圖
在時域(-1,1)內選 Legendre-Gauss(LG)點作為配點。LG點與初始、末端時刻點構成最優控制問題的離散點,將狀態變量和控制變量在這些點上離散。以初始時刻點與LG點為節點構造Lagrange插值多項式來逼近狀態變量;以LG點為節點構造Lagrange插值多項式(或其他多項式)來逼近控制變量。在配點處狀態變量的導數可由全局插值多項式求導來近似,從而將微分方程約束轉換為一組代數約束。而性能指標中的積分項以及終端狀態可由高斯求積公式計算得到。經上述離散化方法,原始最優控制問題就轉化為非線性規劃問題,而后通過有效的大規模稀疏NLP求解器即可求解。具體高斯偽譜法的連續最優控制問題離散化方法可參見文獻[5],在此不再贅述。
2 返回軌跡優化
2.1 動力學模型
考慮地球旋轉影響,假定飛行器側滑角為零,SLV無動力返回動力學方程[6]為:
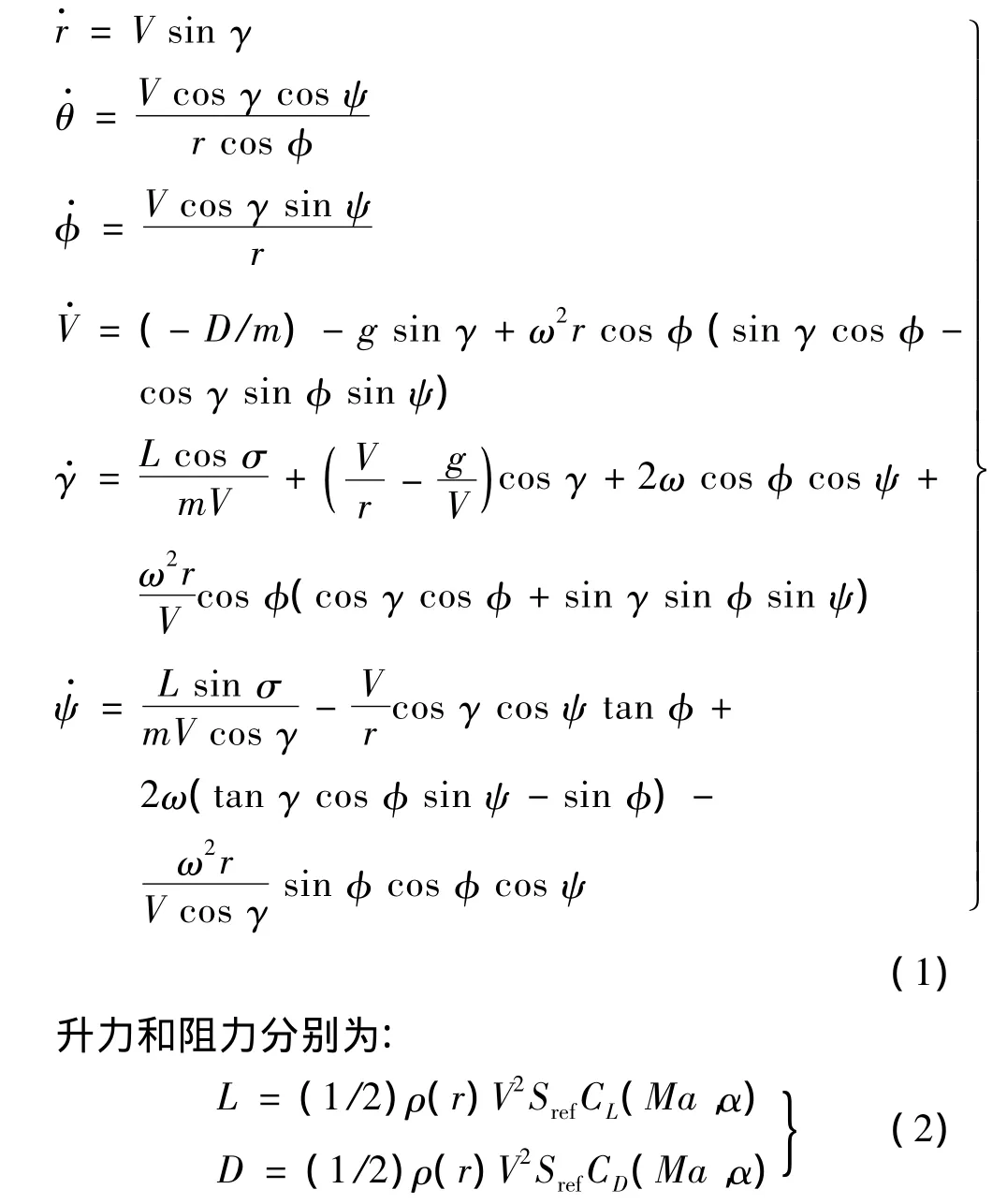
為加快優化速度和有效地利用自動微分技術,密度ρ(r)、當地聲速c(r)以及升阻力系數(CL,CD)均采用擬合模型。
2.2 狀態及控制變量的選取
對于再入軌跡優化問題,最為常見的是將X=[r,θ,φ,V,γ,ψ]T∈R6作為狀態變量,而 U=[α,σ]T∈R2為待優化的控制變量。這屬于無慣性控制,是一種假定不存在命令延遲的理想情況。從實際系統考慮,控制舵面偏轉限制必然使得攻角α、傾側角σ存在帶寬和速率限制,這在發生控制舵面故障的情況下更為明顯。出于任務安全性的考慮,在模型中考慮α和σ的角速率限制。令

式中,uα,uσ稱為“偽控制量”,作為優化時的最優控制變量,可以對其加以限制來滿足實際控制能力約束。將式(1)與式(3)聯立,可得新的方程及狀態變量 X=[r,θ,φ,V,γ,ψ,α,σ]T∈R8,而新的控制量為U=[uα,uσ]T∈R2。
2.3 優化性能指標與各類約束
2.3.1 末端進場走廊(FAC)
目前亞軌道飛行器返回主要沿用航天飛機再入的分段策略,即再入段、末端區域能量管理段和自動著陸段,這有利于降低各段軌跡設計與制導的難度,但各段需采用不同的制導方法。對于基于最優控制理論的制導方法,只是給定期望的終端條件,尋求一條滿足各種約束的最優軌跡,而能量管理、航向調整實質上是通過軌跡優化自動實現的。考慮到亞軌道飛行器返回初始高度較低,因而可以嘗試合并再入段與TAEM段,從返回初始狀態到自動著陸界面采用統一的軌跡優化與最優制導方法。
為了描述性能指標與終端約束,引入“末端進場走廊”(FAC)的概念[6],如圖 2所示。FAC 是在返回段終端速度、速度傾角與速度方位角、著陸場位置及方向給定情況下,能夠保證飛行器安全返回的終端位置(經度、緯度、高度)的范圍。FAC生成方法與具體飛行器特性、著陸場信息(如位置、跑道長度)等有關。
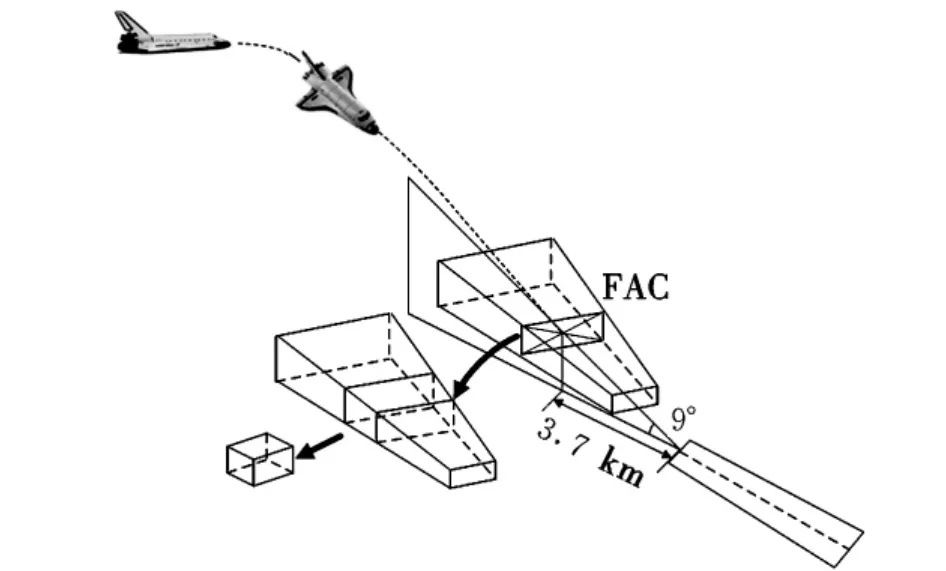
圖2 末端進場走廊
2.3.2性能指標與終端約束
終端約束要求在滿足其他各類約束條件下飛行器能夠準確捕獲FAC,即:
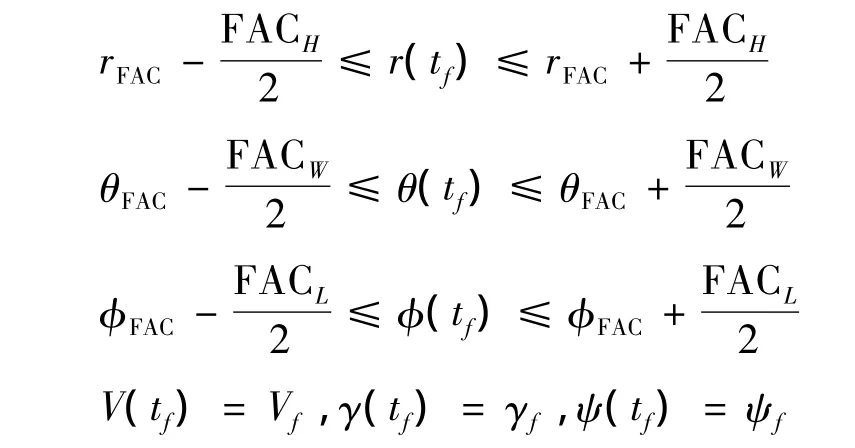
式中,rFAC,θFAC,φFAC分別為 FAC 中心的地心距、經度、緯度;FACL,FACW,FACH分別為三維 FAC的長、寬、高。
選擇如下性能指標:

式中,w1,w2,w3為權重系數,這里選 w1=w2=w3=1,使得終端位置與末端進場走廊中心位置距離最小。
2.3.3其他約束
返回過程還需滿足狀態、控制量約束和過載nz、動壓q、熱流密度等路徑約束。
3 優化算例與結果分析
3.1 優化算例
本文采用X-33總體參數及氣動模型進行仿真計算[6]。
返回初始狀態與終端條件約束如下:
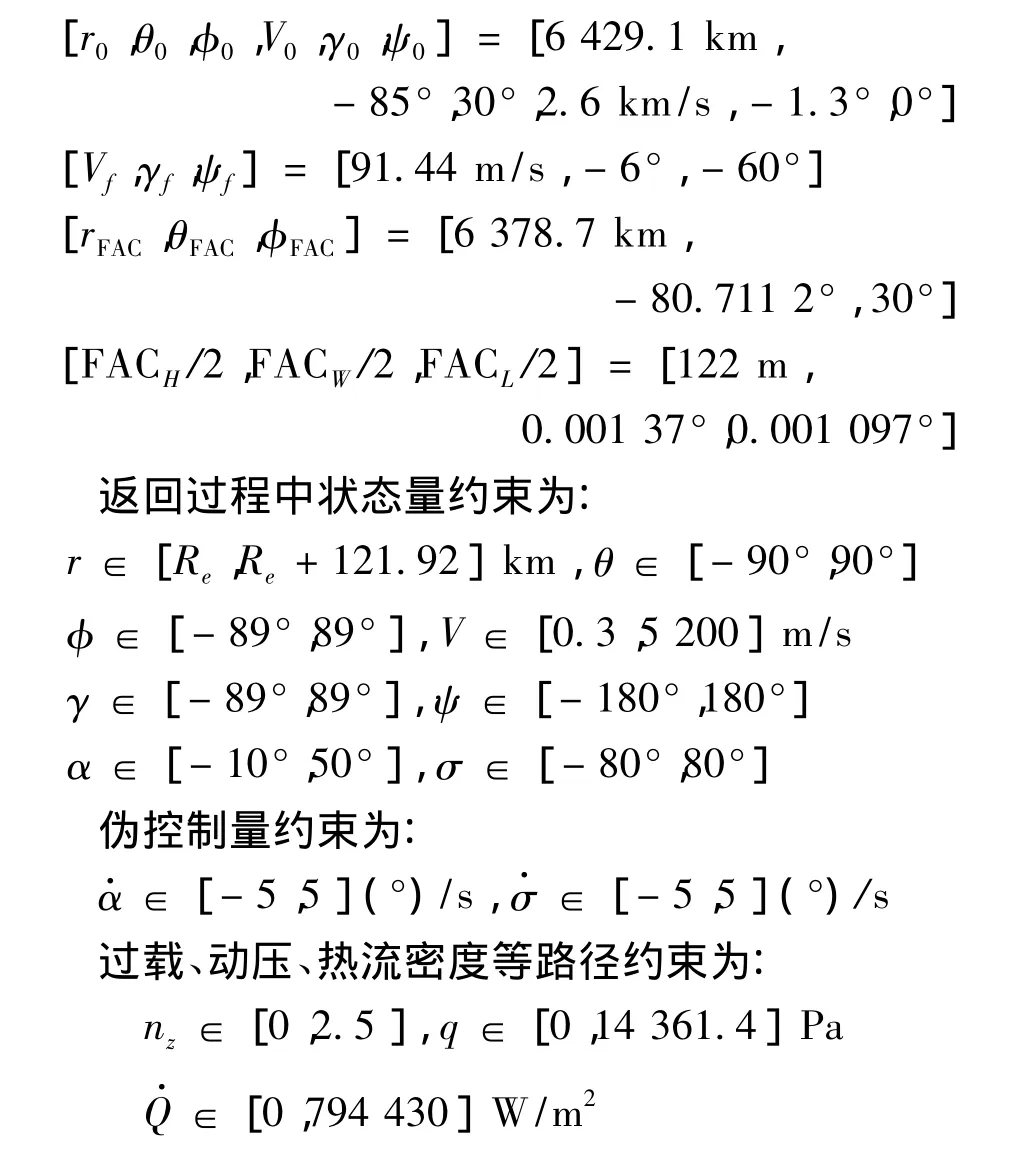
3.2 優化結果
為便于比較,分別對不采用偽控制量和采用偽控制量兩種方法進行了優化,優化結果如表1所示。
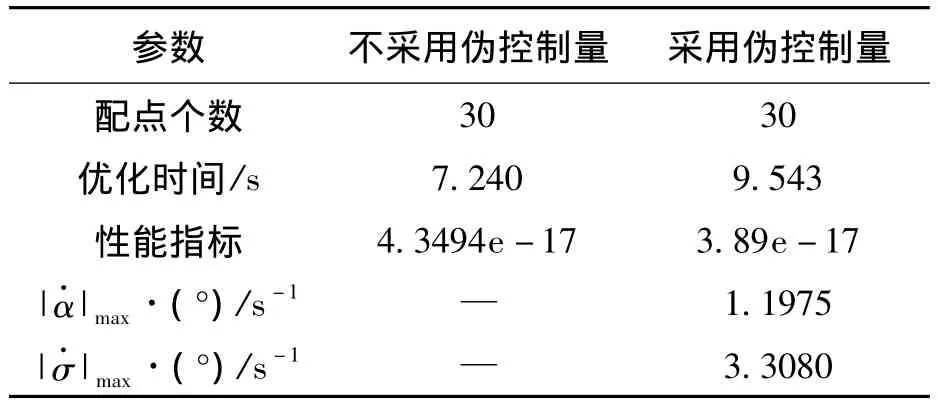
表1 優化結果比較
從表1可以看出,選用30個LG點,兩種方法優化時間分別為7.240 s和9.543 s,而同樣算例的文獻[6]則需要25 s。本文算法在Matlab平臺下實現,雅克比矩陣通過自動微分方法計算,如采用C代碼、解析雅克比矩陣等手段,優化速度可進一步提高。性能指標為10-17量級,表明終端時刻飛行器非常接近FAC中心。
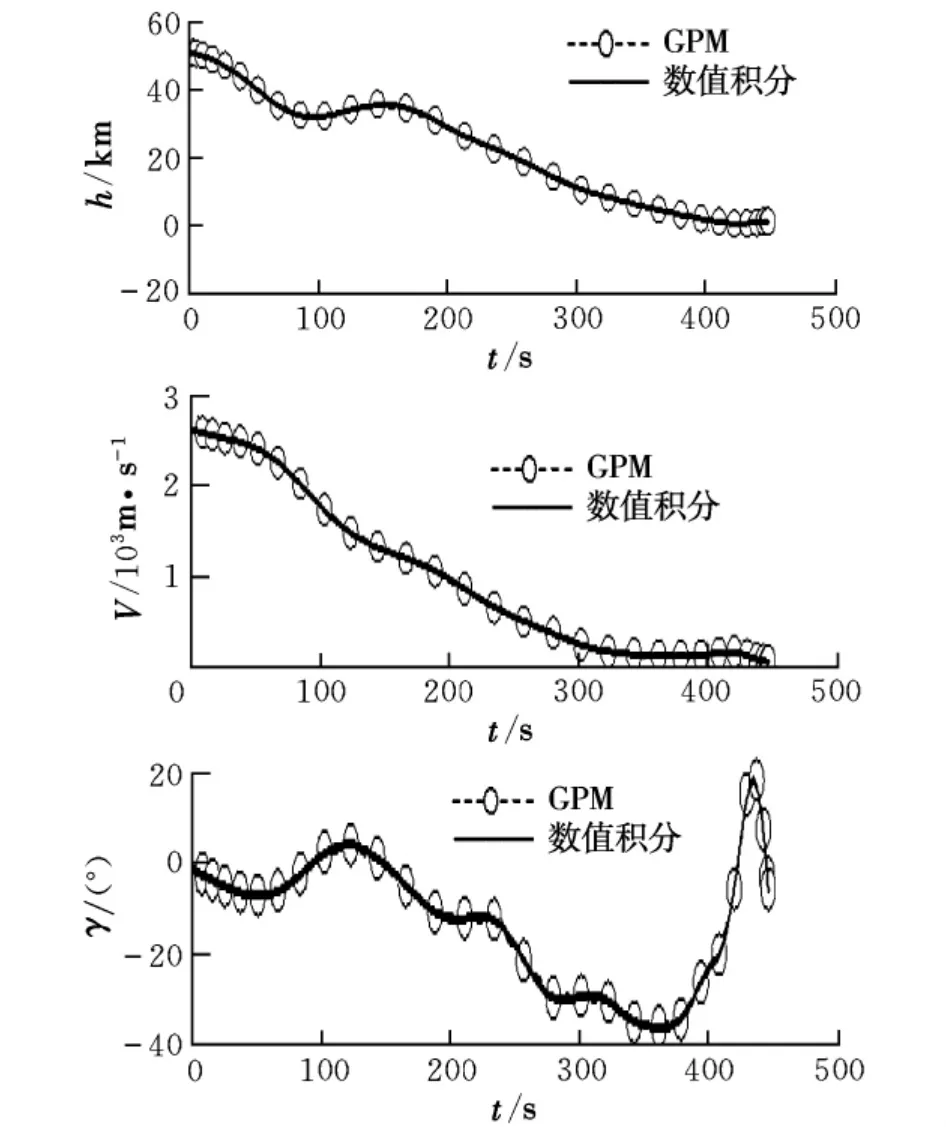
圖3 狀態量變化曲線
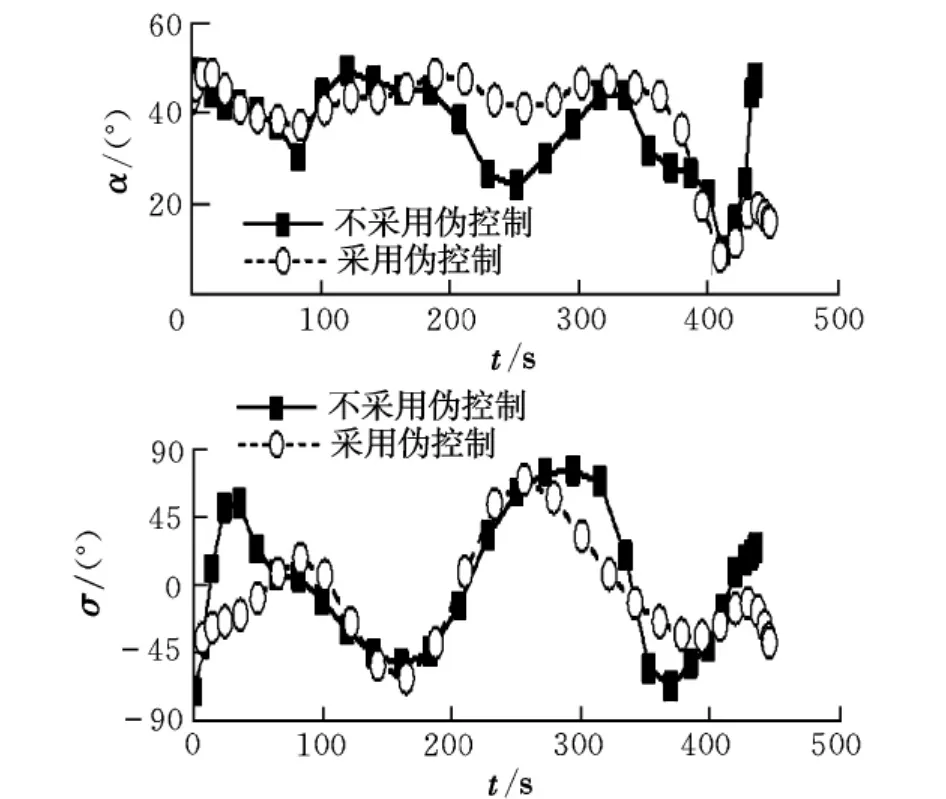
圖4 控制量變化曲線
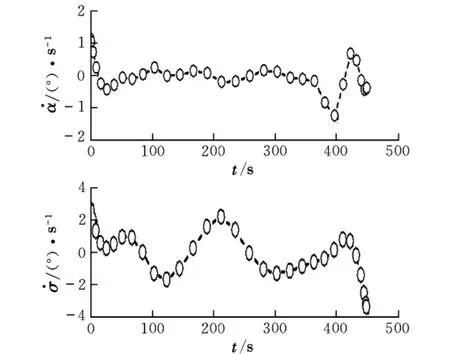
圖5 偽控制量變化曲線
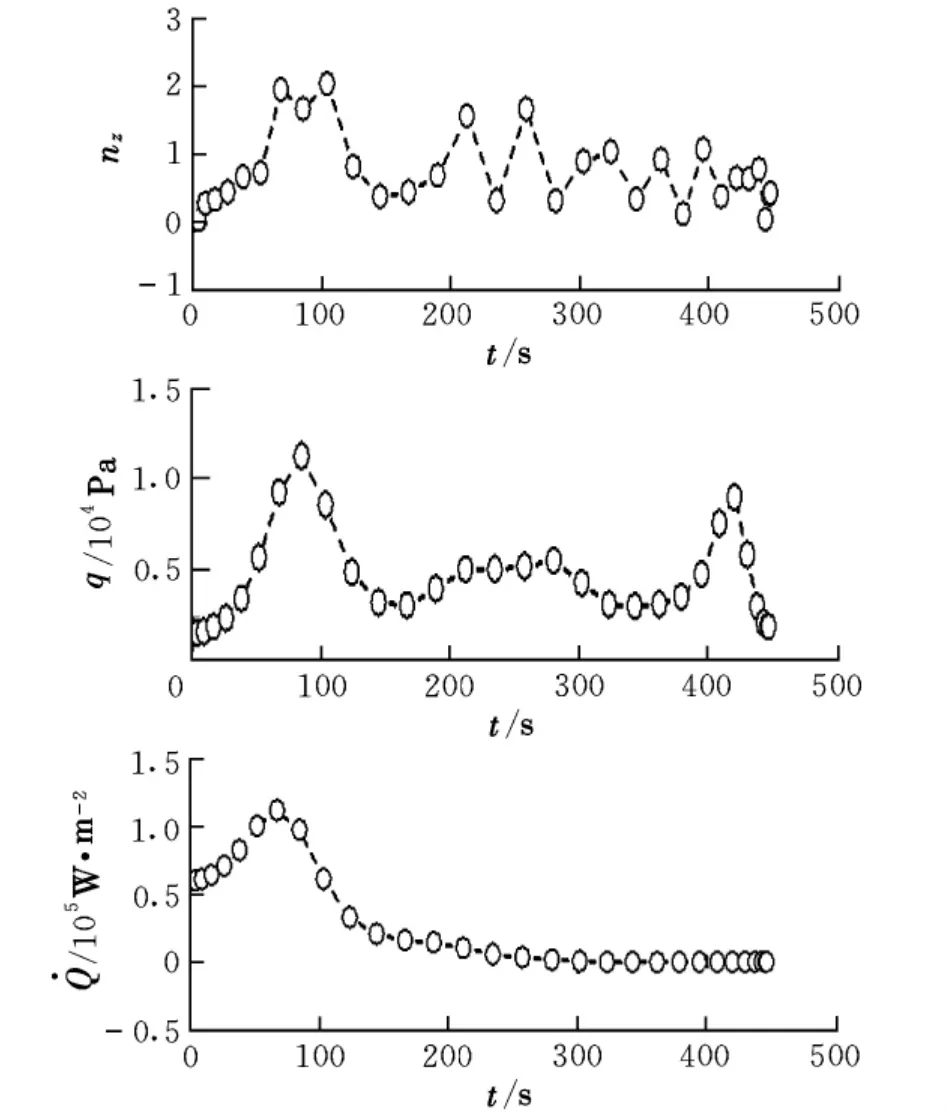
圖6 路徑約束變化曲線
圖3~圖6分別為狀態量、控制量、偽控制量和路徑約束變化曲線。圖3中的h=r-Re表示飛行高度。從圖3中可以看出,GPM優化與數值積分結果非常吻合,表明所得結果是可行的。從圖4可以看出,采用偽控制量方法,攻角、傾側角曲線更為平滑。從圖5可以看出,偽控制量(即控制量攻角和側滑角的變化率)均在要求的±5(°)/s范圍內。圖6表明,返回過程滿足法向過載、熱流密度及動壓路徑約束。
3.3 可行性與最優性驗證
對于采用離散化方法求解連續最優控制問題而言,驗證解的可行性與最優性是非常必要的。可行性通過數值積分結果與優化結果相比較來驗證,積分時的控制量由最優離散控制量插值得到。GPM可以根據協態映射原理估算LG點處的協態信息,從而求得哈米爾頓函數值以檢驗解的最優性。本文研究對象屬于存在路徑約束、終端時刻自由的最優控制問題,且為自治系統,因此對應的哈密爾頓函數應恒為零,這是最優軌跡應滿足的一階最優性必要條件。
圖7為Hamiltonian函數變化曲線。可以看出Hamiltonian函數接近于零,實際數據在10-11量級,可以認為所得結果接近最優解。
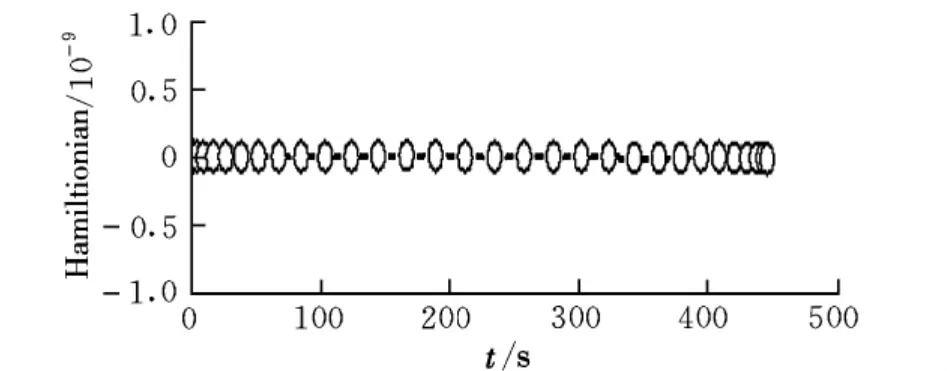
圖7 Hamiltonian函數變化曲線
3.4 SLV返回三維飛行軌跡
圖8為仿真得到的亞軌道飛行器三維飛行軌跡與地軌跡。
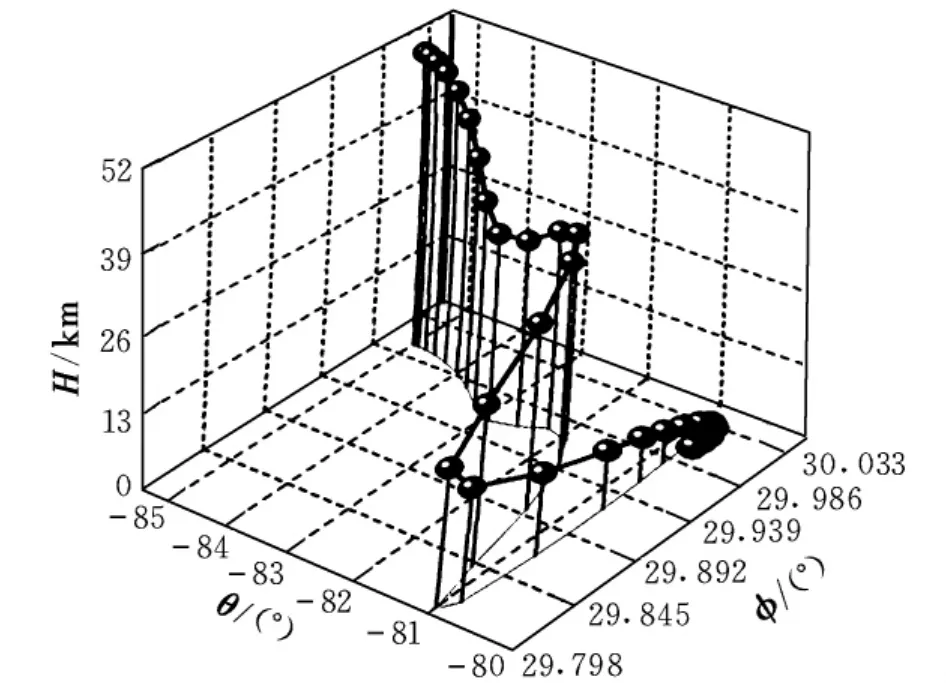
圖8 三維飛行軌跡與地軌跡
盡管本文沒有采用末端區域能量管理段、HAC等概念,但從圖8中三維飛行軌跡可以看出,實際上全程返回段都存在能量管理機制。在返回段開始,由于能量管理能力有限,只有小的S機動;返回中段,大約從20~30 km高度開始,進行大的S轉彎來消耗能量;返回末段,在小范圍能量管理的同時進行航向調整。這與傳統的再入分段策略大致相同,從另一個角度驗證了所得結果的可行性。
4 結束語
本文利用高斯偽譜法進行了亞軌道飛行器返回軌跡優化。為增加任務安全性,在模型中考慮地球自轉影響以及偽控制量約束。在描述性能指標與終端約束時,引入“末端進場走廊”概念。仿真結果表明,在滿足控制能力約束、路徑約束等條件下,GPM能夠快速準確地生成捕獲FAC中心的SLV返回軌跡。后續研究工作可考慮采用更為有效的初值猜想機制、解析雅克比矩陣等手段提高計算效率。
[1] Mease K D,Chen D T,Teufel P,et al.Reduced-order entry trajectory planning for acceleration guidance[J].Journal of Guidance,Control and Dynamics,2002,25(2):257-266.
[2] Shen Z,Lu P.On-board entry trajectory planning expanded to sub-orbital flight[C]//AIAAGuidance,Navigation,and Control Conference and Exhibit.Austin,Texas,2003:1-13.
[3] Fahroo F,Doman D B,Ngo A D.Modeling issues in footprint generation for reusable launch vehicles[C]//Proceedings of the 2003 IEEE Aerospace Conference.Big Sky,MT,2003:1-9.
[4] Huntington G T,Benson D,Rao A V.A comparison of accuracy and computational efficiency of three pseudospectralmethods[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Hilton Head,South Carolina,2007:1-25.
[5] Huntington G T.Advancement and analysis of a gauss pseudo spectral transcription for optimal control problems[D].Cambridge,MA:Massachusetts Institute of Technology,2007.
[6] Singh B,Bhattacharya R.Optimal guidance of hypersonic vehicles using B-splines and galerkin projection[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Honolulu,Hawaii,2008:1-11.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
