荷蘭海軍APAR多功能雷達系統及其開發經驗
2012-03-07 06:22:50謝紅勝宿勇
艦船科學技術 2012年6期
關鍵詞:系統
謝紅勝,宿勇
(1.中國艦船研究設計中心,湖北武漢430064;2.海軍裝備部,北京 100071)
0 引言
早在1991年11月,荷蘭電信設備公司(Signaal)就和FEL-TNO公司的物理與電子實驗室發起了“改進監視和跟蹤的先進雷達技術(ARTIST)”項目的研究工作。目的是設計一種以“改進型海麻雀”導彈為基礎的全綜合防空戰(AAW)系統,并且該系統能進行擴展以控制“標準”2導彈。由ARTIST項目發展而成的防空戰系統最終將SMART-L和SMART-S雷達、STING相控陣火控雷達、紅外傳感器和防空導彈綜合起來。1992年11月,德國和加拿大加入此項開發計劃。1993年7月,荷蘭、德國、加拿大三國共同簽署了聯合研制APAR艦載有源相控陣雷達的諒解備忘錄(MOU),正式開啟了APAR雷達的研制工作。
1995年12月29 日,荷蘭電信設備公司與其海軍簽訂了1.25億美元關于APAR雷達工程開發模型(EMD)的合同。根據重新協商的APAR EMD的分工,荷蘭出資0.456億美元,德國0.419億美元,加拿大0.375億美元。該EMD合同分為2部分:第一部分為試驗樣機/技術示范品EMD-1(工程開發型1),用來確認計劃中雷達的基本設計參數,主要是單陣列原型樣機的研制;第二部分為一個技術試驗臺(EMD-2),由單個天線陣列構成,將其用作評估工具。EMD-2具有APAR雷達的全部性能,但其覆蓋域、靈活性和ECCM功能受到一定限制。EMD -2是按照“三方護衛艦合作”防空戰(TFC-AAW)計劃單獨生產APAR雷達,并參與TFC-AAW系統的陸基試驗。第一部APAR雷達樣機于1998年9月研制完成。同年底德國和荷蘭海軍都訂購了該雷達。首批APAR雷達于2001年交付德國和荷蘭海軍。
APAR雷達設計用于保障海軍區域防空任務,能同時完成對掠海飛行及高速俯沖小雷達反射截面積(RCS)反艦導彈威脅的探測、跟蹤、火力控制、導彈引導等多種作戰任務。
1 APAR雷達的威脅分析和功能概述
隨著反艦導彈技術的不斷發展和進步,現代艦載雷達必將面臨掠海飛行及高速俯沖小雷達反射截面積(RCS)反艦導彈的威脅。上述2類導彈能以數個重力加速度機動,以極快的速度對己艦或防御平臺發起攻擊,對傳統艦載雷達構成了巨大的挑戰。其中,掠海飛行導彈威脅對于艦載雷達來說尤為危險。由于受水平和垂直視距的限制,加上艦載雷達在低空探測時通常會遭受多徑效應和異常傳播現象(如大氣波導現象)影響,艦載雷達對這種導彈的探測能力會受到很大限制。即使對于地平線探測,艦載雷達的防御反應時間極為短暫,尤其當目標以超音速運動時。另外,傳統艦載雷達通常需要1部火控雷達或光電傳感器配合完成對艦載武器的火力控制以應敵。傳統的機械旋轉火控雷達或光電傳感器必須以一定的時間順序應對多個來襲目標,存在很大的時延。即使對于最先進的相控陣火控雷達來說,也要經歷接收來自艦載雷達目標信息所消耗的時間。當敵方以足夠多的導彈同時對己艦或防御平臺發起飽和攻擊時,這種探測、火控功能分離艦載雷達與敵導彈的交戰能力將受到極大的限制。
要想從容應對上述威脅,艦載雷達必須要提高對低空目標、小RCS目標的探測能力,縮短從目標探測到與目標交戰的反應時間,具有同時支持多批次艦對空交戰的能力。APAR雷達能滿足上述需求,可同時完成地平線搜索、導彈引導支援、(空中、水面、直升機)目標跟蹤、水面火力支援、高距離分辨率目標成像、指令搜索、目標指示、有限體搜索等任務,并且每種任務均有相應的電子對抗措施以減少各種干擾的影響。APAR雷達作為艦上多傳感器組件的一部分,與SMART-L遠程監視三坐標雷達、艦載紅外搜索與跟蹤傳感器等協同工作,進一步提高了戰艦的綜合防空探測能力。
2 APAR雷達的系統構成及主要性能參數
APAR雷達系統由4個固定的橢圓形天線陣列陣面組成,每個陣列包含3 200個X波段砷化鎵單片微波集成電路(GaAs MMIC)收/發組件。這3 200個收/發組件又分為32個縱列。每個收/發組件都有自己的數據分配和功率變換單元,每秒能產生500個筆形波束。4陣面的APAR雷達對空探測距離達150 km,覆蓋范圍達360°×70°。在甲板下面,該雷達的組成部分還有1個數據處理和信號控制機柜以及1個與戰艦綜合指揮系統對接的接口裝置。APAR雷達在大多數型號的護衛艦上都適于安裝。
3 APAR雷達的技術特點
近年來不斷增加的艦載雷達低空探測需求以及短系統反應時間和高發射功率要求,在很大程度上決定了APAR雷達的設計思想和技術特點。
3.1 靈活性和自適應能力
APAR雷達具有很強的靈活性,這使其能以盡可能快的速度探測到最具威脅的目標。與傳統監視雷達和跟蹤雷達不同,APAR雷達能同時實現二者的功能。傳統監視雷達系統被設計為在盡可能大的距離、方位和高度范圍內具備不依賴環境或未知目標特性的高魯棒探測能力;跟蹤雷達系統則設計為只在有限的距離、方位、高度和速度范圍內具備對目標的精確探測能力。監視雷達與跟蹤雷達在波束類型、掃描原理、信號波形、數據更新率等方面均有很多不同之處。APAR雷達之所以能同時完成技術要求截然不同的監視與跟蹤任務,原因在于其具有較強的靈活性、自適應能力以及系統復雜性。下面舉例說明APAR雷達的靈活性。
1)能自動調整跟蹤目標所需的能量與時間消耗
APAR雷達對目標的探測跟蹤過程均假定目標特性(如目標的RCS值)已知。RCS值可能隨雷達視角、射頻及電磁波傳播環境改變而改變。圖1為1架戰斗機低空飛行接近雷達時的RCS測量值。圖中曲線底部凹點是由多徑波瓣引起的。APAR雷達在消除多徑波瓣0點時,不只是通過自動功率調整手段,還通過在寬頻范圍內改變雷達載頻來實現。
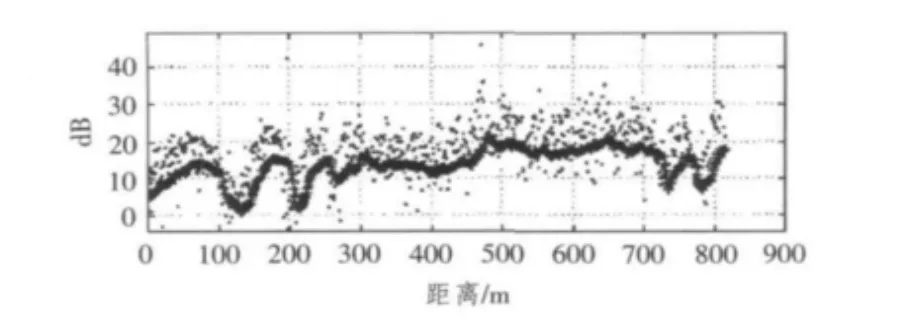
圖1 1架戰斗機以低仰角的飛行方向接近雷達時的RCS測量值Fig.1The RCS measured from a fighter aircraft,approaching the radar at low elevation
2)目標跟蹤更新率參數能與目標參數自適應面對直線移動目標或非威脅目標,采用正常跟蹤模式,而面對機動目標或交戰目標,則采取較高的目標跟蹤更新率。當目標進入雷達視野范圍時,APAR雷達還可通過加寬波束來保持對目標的跟蹤。此外,APAR雷達還采用與目標RCS值變化相適應的“自適應目標跟蹤算法”。通過采用上述多種技術手段,APAR雷達能在各種作戰條件下對機動目標進行跟蹤。圖2給出了某典型目標的RCS值隨視角改變而變化的情況。
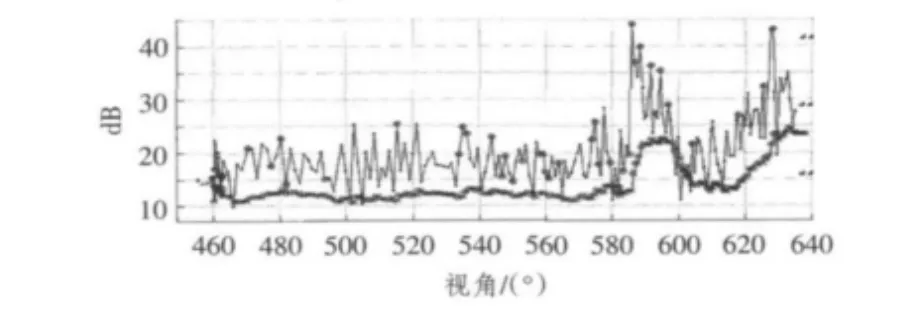
圖2 目標RCS值隨視角改變而變化的示例Fig.2Changes of the RCS due to variation of the aspect angle of the aircraft
3)能探測到在近程到中程距離范圍之內突然出現的威脅目標
APAR雷達采用了特殊的波束和波形來探測所謂的“彈射目標”,如潛艇發射的導彈目標。雷達在探測到導彈目標之后,系統能立即計算目標跟蹤軌跡,通過調整發射波形緊密監視目標,根據目標飛行軌跡反推發現導彈發射點。
3.2 抗干擾能力強
APAR雷達的4陣面有源相控陣天線采用X工作波段,使其具有了頻率覆蓋范圍大、目標探測精度高等優點,能更好地抗多徑效應、大氣波導以及其他干擾。另外,APAR雷達的接收電路具有高增益、低噪聲特性和大動態范圍。因此,該雷達的靈敏度較高、產生的信號純度高、抗雜波性能優良。在雜波環境下,該雷達還采用特殊波形來提高目標在雜波回波中的可見度。
盡管APAR雷達具備了上述基本技術特征,但掠海飛行導彈的小RCS值對雷達仍然提出了極為苛刻的要求。因此,抗雜波干擾對于APAR雷達來說仍是最具挑戰性的。為此,APAR雷達進一步采用了一系列抗雜波/抗干擾技術:變化的信號波形、變化的波束形狀、在處理電路中引入各種目標特征提取與分類技術等。
3.3 目標探測能力強
由于采用基于砷化鎵單片微波集成電路的有源固態收/發組件,APAR雷達能產生滿足各種作戰任務所需的發射功率。APAR雷達的目標探測是基于多脈沖駐留時間實現的,每個脈沖駐留時間內的射頻和脈沖重復頻率均不相同。通過對單脈沖的雷達回波進行正確組合能有效補償多徑衰落,因此在駐留時間內的目標探測概率較大一些。
3.4 目標探測到交戰的反應時間短
APAR雷達在使用搜索波束探測到目標之后馬上用1束特定波束進一步確認探測,從而縮短系統的反應時間。在確認探測之后,系統立即啟動火控跟蹤。相控陣天線在雷達中的應用極大地縮短了傳統搜索雷達在確認探測之前的旋轉探測時間。
3.5 抗飽和攻擊能力強
為了保障抗飽和攻擊能力,APAR雷達的相控陣天線與新型的導彈引導方式相結合,在終端引導與交戰階段采用中段引導和間斷連續波照射(ICWI)技術,能同時與多枚導彈交戰。這種引導方式的引導信號脈沖特性與傳統的連續引導不同,它使得APAR雷達可以通過時分的方式共享天線孔徑,從而實現同時與多目標交戰。
4 APAR雷達的開發方法和經驗
4.1 開發經驗
由于缺少有源相控陣雷達的相關開發經驗,APAR雷達的開發必定會伴隨大量的技術風險。因此,風險降低一直都是APAR雷達開發過程中遵循的一項基本原則,反應在APAR雷達項目開發過程的多個方面。
1)APAR雷達項目在啟動之前已有一定的技術積累
APAR雷達項目的啟動得益于之前的幾項技術開發計劃。該項目從20世紀70年代的機械旋轉無源相控陣雷達系統開發計劃(TOEKAN計劃)中,獲得了系統體系結構開發經驗。80年代,泰利斯公司全身心地投入到北約防空戰系統(NAAWS)的開發。通過該系統的開發,泰利斯公司完成了能滿足北約未來防空任務需求的X波段有源相控陣雷達設計草圖。受NAAWS計劃的啟發,荷蘭海軍授予了Signaal公司一份試驗型有源相控陣雷達(EXPAR)主要建造單元的開發合同。通過該合同,雷達樣機天線單元于1992年開發成功,同年APAR雷達計劃的定義合同簽訂。在1995年開始的APAR雷達工程與制造開發(EMD)合同框架之下,APAR雷達系統的設計和鑒定最終得以完成。APAR雷達的這種漸進式的開發模式使得系統開發風險逐步降低。
2)APAR雷達工程與制造開發本身也是采用漸進式的開發模式
有一個例子最好地證明了這一點。一個主要的風險是建造高效費比的X波段有源收/發模塊。收/發模塊是雷達系統開發首要考慮的成本因素,其能否批量生產決定了系統可承受性。APAR雷達在收/發模塊中大量應用了多步設計法,即分層多階段的方式來設計和制造收/發模塊,在每個階段中逐步加入測試過的零部件。這種開發方法可以在保證收/發模塊成品率的同時通過減少階段數來降低系統的開發費用。APAR雷達應用軟件的開發也采用類似的分階段多版本方法,在每個階段中逐步定義一些S/W版本,每一版本則增加一些新功能。這種系統功能增量式添加的方式對系統復雜性的控制非常重要。
3)對測試和評估環境進行最大程度的控制
由于APAR雷達具有多功能性和一定的自適應處理能力,進一步加大了對雷達測試的難度。任何一次系統故障都可能是多種原因引起的,因此,如果不能相應地對系統測試和評估環境作出改變和控制,分離并解決故障將變得十分困難。這種對測試環境的控制是通過大量使用具有實時仿真能力的自適應雷達環境模擬器(ARES)實現的。這種模擬器能產生各種特征的目標、噪聲和干擾信號,注入APAR雷達各級系統中,如:緊跟在天線后的視頻顯示終端、射頻終端甚至在緊湊天線測試場內APAR天線發射的EM平面波。使用模擬器定義場景并注入到APAR雷達系統中能對系統實時響應結果進行分析。這種對測試環境的完全控制降低了系統級測試的風險和費用。
APAR雷達的這種測試和評估環境的控制模式表明,系統開發中選擇的風險管理方法很成功。此外,反復的系統評估同樣十分重要,特別是對于系統級的集成,多功能雷達的系統復雜性往往會造成一些無法預測的挑戰。APAR雷達花在系統級上的開發工作量超過了硬件設計和基礎開發工作量,因此系統級集成技術對于APAR雷達來說風險也最大。
系統級集成包括將APAR雷達各部分的功能集成到一個能體現特定行為的自適應操作環中。這方面的發展從1999年以來就變得非常明顯,當時工程開發模型(EDM)正安裝在荷蘭海軍位于荷蘭赫爾德海軍基地的陸地試驗場(LBTS)。LBTS緊鄰海岸,能提供操作環境下的典型測試環境。2001年以來,APAR雷達先后安裝在了德國F124和荷蘭LCF艦上,為系統級的活動提供了更多可用的測試場所。
4.2 主要挑戰
1)系統級評估的挑戰
①惡劣環境下的自動分類算法。APAR雷達工作在包括海雜波、地雜波、飛鳥、雨以及各種目標的真實環境中,必須對接收到的大量回波信號進行分析和解釋。其中,大量的工作都花在了能使雷達虛警率最小化的目標信號自動分類算法的設計和調整上,力求在不降低雷達靈敏性的情況下對所關心的目標進行可靠跟蹤。
②時間預算管理。APAR雷達以時分方式共享天線孔徑,能執行多種任務。為避免天線空閑,天線時間線(每個天線有1個)通常會被完全占用。為能找到滿足更新率、降低時延要求的傳輸時間間隙,系統需要采用智能動態規劃算法,在預算開支和駐留優先級間找到令人滿意的平衡。這樣的算法需要在各種條件下做出詳細的評估之后才能獲得可靠的性能。
③閉環目標跟蹤時的在線波形計算。對于采用特定跟蹤駐留時間的目標跟蹤(與邊跟蹤邊掃描不同,是APAR雷達的一項能力)來說,雷達波形是基于之前的在線測量和處理過的目標特征在線確定的。這樣就能在保證優良跟蹤性能的同時最小化跟蹤時間和更新率,因此可以實現時間預算消耗的最小化。這種在線解決系統優化問題所涉及的參數數量相當巨大,使得APAR雷達“波形計算”過程極為復雜。
④導彈集成。為了給平臺提供盡可能多的同時可用的交戰通道,同時又不需要分離的照射系統,APAR雷達使用了一種新型的導彈引導思路——中段引導和間斷連續波照射相結合是一種新思路,但要求在走向實戰之前需要一系列以風險降低為目標的測試和評估。另外,導彈的自主目標獲取也是一項挑戰。
盡管APAR雷達系統和技術復雜、功能強大,但仍需在各種實際和虛擬工作中對系統進行評估和驗證,這樣有助于更好理解和預測系統性能和工作特性。通過在某種工作環境中進行多年的系統評估和鑒定試驗,APAR雷達的開發成果可以為客戶提供更好地系統性能,為工業部門提供大量的系統開發經驗。
2)實際操作使用挑戰
多功能雷達為用戶帶來了很多自由度,用戶可以按照一定的規則調整雷達系統以適應各種作戰環境。用戶無需了解與系統通信的技術細節,但必須能用特定的操作指令來控制系統。為了能發揮多功能雷達的優勢,用戶必須能將操作指令有效地轉換為對傳感器系統細節的技術設置。這種轉換應該選擇適當的傳感器管理條令執行,該條令體現于能控制多功能雷達的作戰管理系統中。終端用戶與工業部門應該協同完成條令的定義工作,因為用戶操作和工業技術是完成這項工作的前提條件。
5 啟示
現代海軍的作戰任務逐漸遠離了開放的遠海環境,更加強調在特定的近海水域執行任務。在這種水域,各種作戰任務往往由小型艦艇來完成。因此,多功能雷達系統必須要具備在有限的艦艇空間中將所有作戰任務組合在一起的能力,而且要具有較強的應對防御火力和探測嚴重海雜波下的掠海飛行目標的能力。通常認為,1部I/J波段多功能雷達和1枚中程艦空導彈配合被認為是這種戰艦最為理想的系統配置,也是目前I/J波段有源相控陣雷達系統應用的研究焦點。在APAR雷達基礎上,一型經濟可承受的多功能雷達——“改進型海麻雀”有源相控陣雷達系統(SEAPAR)研制成功。該雷達能根據艦上的應用進行優化,與“改進型海麻雀”導彈(ESSM)配合提升艦艇的對空作戰能力。
系統級集成與評估是APAR雷達研發面臨的最大挑戰。鑒于APAR雷達系統的主要成本在于有源相控陣前端系統,因此,基于APAR雷達已有的前端部件,有針對性地改進APAR雷達已有的系統后端功能,將能使整個雷達系統的開發成本和技術風險最小化。如果對前端部件進行改進將能在降低雷達系統在艦船甲板以上重量的同時提高系統的可伸縮性。將APAR雷達已有的后端與有工程應用價值的、可升級的前端組合在一起,就能開發出適應各種實際應用的新型雷達系統,SEAPAR就是成功案例之一。APAR雷達的上述開發經驗如果在實際中得以應用將顯著降低多功能雷達的研制工作量和研制周期。
現代多功能有源相控陣雷達從設計到開發成功是一項極具挑戰性的工作。APAR雷達的成功為我們提供了一系列值得借鑒的寶貴經驗。多功能雷達的自適應能力及其與生俱來的系統復雜性使得系統級集成顯得極為關鍵。模塊化和清晰的接口對于系統級集成尤為重要,能最大程度挖掘系統的功能重配置能力,保證系統的高可靠性和高質量。APAR雷達的成功經驗被很好地應用在了SEAPAR雷達系統的研制中。SEAPAR雷達完全基于APAR雷達的系統功能,很多時候只需設定和調整某些系統參數,就能對雷達的某些功能重新配置。
[1]GOLSHAYAN A K,van GENDEREN P,et al.Active phased array radar[A].Proc.International Conference Radar,1999.
[2]MARTIN R,TOULGOAT M.Multifunction radars in the NAAWS tradition[R].Defense Research Establishment Ottawa,report No.1309,1997.6.
[3]ARECCHI A,ROVETTI F,SCARPA S,et al.Rapporto tecnico studio algorithm multi-radar-tracking[R].Alenia Marconi Systems(AMs)Naval Division,Contract no.18523,1999.
[4]Jane's corporation.Jane'sRadarandElectricWarfare Systems(2007-2008)[M].UK,2007.
[5]Ronald O'Rourke,Naval Transformation:Background and Issues for Congress[EB/OL].http:/assets.opencrs.com/ rpts/RS20851,2009.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32