數(shù)據(jù)鏈航跡與ESM間斷航跡融合跟蹤精度研究
2012-03-24 13:03:52王永安李世忠關(guān)成斌
海軍航空大學(xué)學(xué)報 2012年4期
關(guān)鍵詞:融合
王永安,李世忠,關(guān)成斌
(1.91880 部隊,山東 膠州 266300;2.海軍航空工程學(xué)院電子信息工程系,山東 煙臺 264001)
近年來,機(jī)載傳感器得到迅猛發(fā)展,所裝備的傳感器越來越多、越來越先進(jìn)。如警戒雷達(dá)、紅外傳感器和電子支援措施(ESM),特別是最新發(fā)展的空空、空地通信數(shù)據(jù)鏈和聯(lián)合戰(zhàn)術(shù)信息分配系統(tǒng)(JTIDS)等,已成為現(xiàn)代作戰(zhàn)飛機(jī)了解態(tài)勢環(huán)境的重要信息源。通過數(shù)據(jù)鏈裝置橫向進(jìn)行機(jī)載多傳感器的數(shù)據(jù)融合,實現(xiàn)對多個傳感器探測信息的綜合、分析和處理,達(dá)到資源共享,功能、性能相互彌補(bǔ),得到目標(biāo)狀態(tài)、屬性等戰(zhàn)場態(tài)勢信息,取得傳統(tǒng)單平臺單傳感器無法完成的功能和效果[1]。同時大大減輕了簡單增加傳感器或提高傳感器性能帶來的種種矛盾,提高了對目標(biāo)的探測概率,減小虛警率,受到了世界各國的廣泛重視[2]。如美國的Link16、Link14、Link4A,以色列的ACR-740 等數(shù)據(jù)鏈實現(xiàn)了機(jī)載、陸基和艦載數(shù)據(jù)系統(tǒng)之間信息的交換[3-5]。通過ESM 系統(tǒng)與數(shù)據(jù)鏈系統(tǒng)的數(shù)據(jù)融合,可以提高對目標(biāo)的探測和跟蹤性能[2,6-7]。電子支援措施(ESM)在工作中能否獲取關(guān)于目標(biāo)的狀態(tài)信息取決于對方輻射源的工作狀態(tài)。因此,它獲取的目標(biāo)航跡信息往往是不連續(xù)的。數(shù)據(jù)鏈和ESM 數(shù)據(jù)融合是機(jī)載綜合信息處理的一項重要內(nèi)容,涉及多種因素,這些因素對數(shù)據(jù)鏈航跡和ESM 航跡融合精度影響如何是實際應(yīng)用中面臨的一個問題,本文研究了數(shù)據(jù)鏈航跡和ESM 間斷航跡的融合流程和算法,并對影響數(shù)據(jù)鏈和ESM 融合精度的各種因素進(jìn)行了仿真分析。
1 算法描述
1.1 數(shù)據(jù)鏈航跡+ESM 間斷航跡融合流程
機(jī)載傳感器通常使用數(shù)據(jù)鏈傳送藍(lán)機(jī)的航跡,且由于對方輻射源工作方式的限制,電子支援措施(ESM)得到的航跡往往是間斷的,數(shù)據(jù)鏈航跡+ESM間斷航跡融合算法流程如圖1 所示,主要進(jìn)行以下4 個步驟的處理。
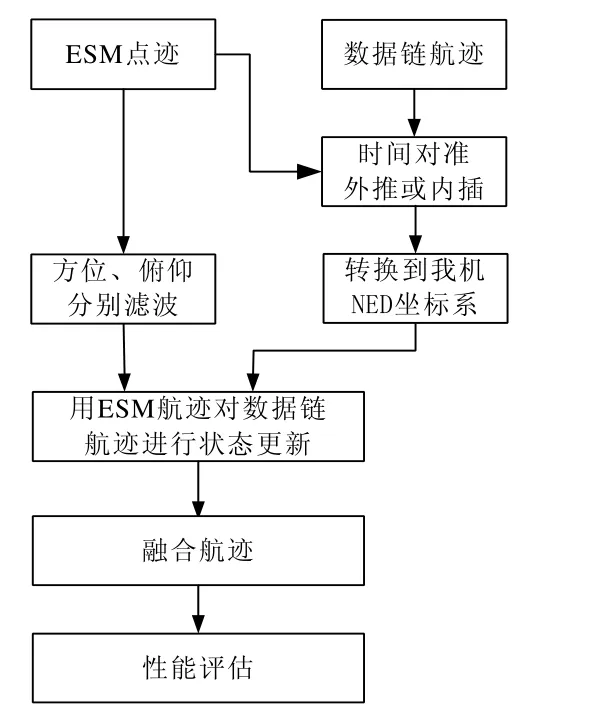
圖1 數(shù)據(jù)鏈航跡+ESM 間斷航跡關(guān)聯(lián)融合跟蹤流程圖
1)對ESM 點跡方位、俯仰上分別濾波,采用KF 濾波算法;
2)以ESM 航跡為基準(zhǔn)進(jìn)行時間對準(zhǔn),根據(jù)ESM航跡的時間情況,對數(shù)據(jù)鏈航跡進(jìn)行外推或內(nèi)插;
3)將數(shù)據(jù)鏈的目標(biāo)航跡信息轉(zhuǎn)換到紅機(jī)NED坐標(biāo)系;
4)利用ESM 方位、俯仰濾波后的航跡對數(shù)據(jù)鏈航跡進(jìn)行狀態(tài)更新得到融合航跡。
1.2 ESM 方位角、俯仰角濾波
對 ESM 測得的方位角、俯仰角分別采用Kalman 濾波器進(jìn)行濾波,具體方法如下。
離散時間系統(tǒng)的動態(tài)方程可表示為

式中:F(k)為狀態(tài)轉(zhuǎn)移矩陣;X(k)為狀態(tài)向量;G(k)為輸入控制項矩陣;u(k)為已知輸入或控制信號;V(k)是零均值、白色高斯過程噪聲序列,其協(xié)方差為Q(k);如果過程噪聲V(k)用Γ(k)v(k)代替,則Q(k)變?yōu)棣?k)qVT(k),Γ(k)為過程噪聲分布矩陣。

式中:kjδ為kronecker delta 函數(shù),該性質(zhì)說明不同時刻的過程噪聲是相互獨立的。
離散時間系統(tǒng)的量測方程為

式中:H(k+1)為量測矩陣;W(k+1)為具有協(xié)方差R(k+1)的零均值、白色高斯量測噪聲序列,

該性質(zhì)說明不同時刻的量測噪聲也是相互獨立的。
式中,T為采樣間隔。
初始協(xié)方差為

于是狀態(tài)估計和濾波從k=2 時刻開始。
狀態(tài)轉(zhuǎn)移矩陣為

過程噪聲分布陣為
然后利用如下的Kalman濾波算法進(jìn)行跟蹤。
狀態(tài)的一步預(yù)測為

協(xié)方差的一步預(yù)測為

新息協(xié)方差為

增益為

狀態(tài)更新方程為

協(xié)方差更新方程為
1.3 內(nèi)插、外推法時間配準(zhǔn)算法
如果數(shù)據(jù)鏈航跡與ESM 航跡的數(shù)據(jù)率不一致,首先要進(jìn)行時間對準(zhǔn);內(nèi)插、外推時間配準(zhǔn)方法認(rèn)為時間對準(zhǔn)就是在同一時間片內(nèi),對各傳感器采集的目標(biāo)觀測數(shù)據(jù)進(jìn)行內(nèi)插外推,將高精度觀測時間上的數(shù)據(jù)推算到低精度的觀測時間點上,以達(dá)到2類傳感器時間上的同步。在這里以ESM 航跡為基準(zhǔn),對數(shù)據(jù)鏈航跡使用內(nèi)插、外推法進(jìn)行時間對準(zhǔn)。該方法的步驟如下:
1)選取時間片TM,時間片的劃分隨具體的運動目標(biāo)而異,目標(biāo)的狀態(tài)可以分為靜止、低速運動和高速運動,相應(yīng)的進(jìn)行融合的時間片就可以選取為小時、分鐘和秒級;
2)將各傳感器的觀測數(shù)據(jù)按測量精度進(jìn)行增量排序;
3)將高精度的觀測數(shù)據(jù)向低精度的時間點內(nèi)插、外推,以形成一系列等間隔的目標(biāo)觀測數(shù)據(jù)。同一時間片內(nèi)的觀測數(shù)據(jù)通常有多個,如圖2 所示。

圖2 內(nèi)插、外推法時間配準(zhǔn)算法示意圖
由高精度的時間點a向低精度時間點b的歸結(jié)算法如下:
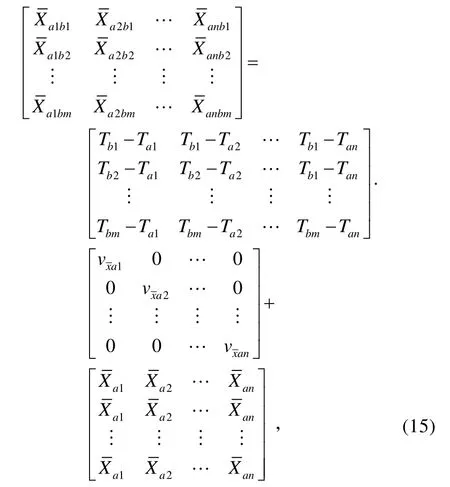
式中,X分別為x、y、z三個方向的坐標(biāo)。
而對于速度的外推,可假設(shè)在同一時間片內(nèi),目標(biāo)作勻速直線運動,則由時間點t1外推至?xí)r間點t2速度不變,即vt1=vt2。
1.4 航跡融合算法
1)數(shù)據(jù)鏈直角坐標(biāo)系下量測誤差轉(zhuǎn)換為極坐標(biāo)系下角度量測誤差。因為k時刻目標(biāo)的數(shù)據(jù)鏈位置量測值(x(k)、y(k)、z(k))和方位、俯仰轉(zhuǎn)換量測值(α(k)、γ(k))有如下的關(guān)系:

對式(16)分別對x、y、z上求偏導(dǎo)可得:
由式(18)可以求出數(shù)據(jù)鏈在方位和俯仰上的等效測量誤差。
2)在時間對準(zhǔn)以后,按照方差加權(quán)方法對同一采樣時刻的αData(k)、αESM(k) 進(jìn)行數(shù)據(jù)壓縮,則在該時刻目標(biāo)的方位角為[8]
同理可對俯仰角γData(k)、γESM(k) 進(jìn)行壓縮。
2 仿真結(jié)果分析
紅方兩架飛機(jī)編隊飛行,紅機(jī)上搭載雷達(dá)和ESM 兩種傳感器,友機(jī)給紅機(jī)傳來數(shù)據(jù)鏈航跡,藍(lán)方兩架飛機(jī)編隊飛行。紅機(jī)作為融合中心,在NED坐標(biāo)系下處理數(shù)據(jù),融合后輸出結(jié)果。
仿真時間100 s,導(dǎo)航數(shù)據(jù)的數(shù)據(jù)率0.1 s;融合后輸出數(shù)據(jù)的周期0.5 s;藍(lán)機(jī)1 地理坐標(biāo)初始位置緯度、經(jīng)度、高度分別為[36.1, 120, 8 111.3],初始速度X、Y、Z方向分別為[300, 300, 0];藍(lán)機(jī)2地理坐標(biāo)初始位置緯度、經(jīng)度、高度分別為[36.1, 119.4, 8 347.9],初始速度X、Y、Z方向分別為[500, 500, 0];藍(lán)機(jī)1 與紅機(jī)距離100 km,友機(jī)與紅機(jī)距離30 km;紅機(jī)地理坐標(biāo)初始位置緯度、經(jīng)度、高度分別為[36.1,x, 5901.5],初始速度X、Y、Z方向分別為[300, 300, 0];友機(jī)地理坐標(biāo)初始位置緯度、經(jīng)度、高度分別為[36.1,x, 9 499.9],初始速度X、Y、Z方向分別為[300, 300, 0];數(shù)據(jù)鏈測量周期T1D= s,數(shù)據(jù)鏈量測等間隔間斷3 次,每次間斷一個量測點; ESM 測量周期E0.1T=s,等間隔間斷8 次,ESM關(guān)機(jī)時間占總工作時間的20%;Monte Carlo 仿真100 次。
2.1 傳感器誤差對跟蹤精度的影響分析
設(shè)數(shù)據(jù)鏈X、Y、Z方向上均方根誤差相同σX=σY=σZ,且其均方根誤差記為σXYZ;ESM 方位角、俯仰角測量精度相同,且其均方根誤差記為σAP,目標(biāo)與紅方飛機(jī)均勻加速直線飛行,分3 種情況進(jìn)行仿真,見表1,數(shù)據(jù)鏈精度、ESM 精度依次下降。仿真結(jié)果如圖3~8 所示。

表1 仿真場景
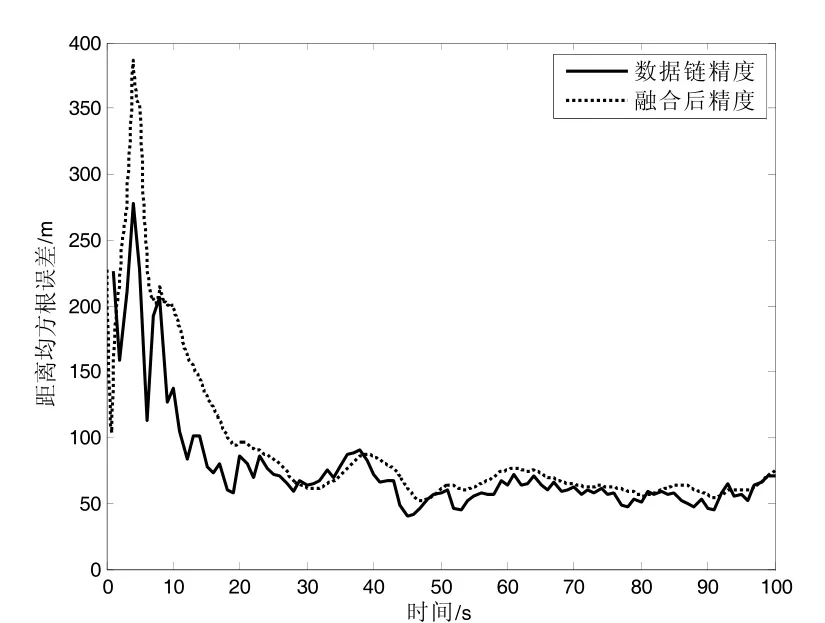
圖3 場景1 距離精度比較
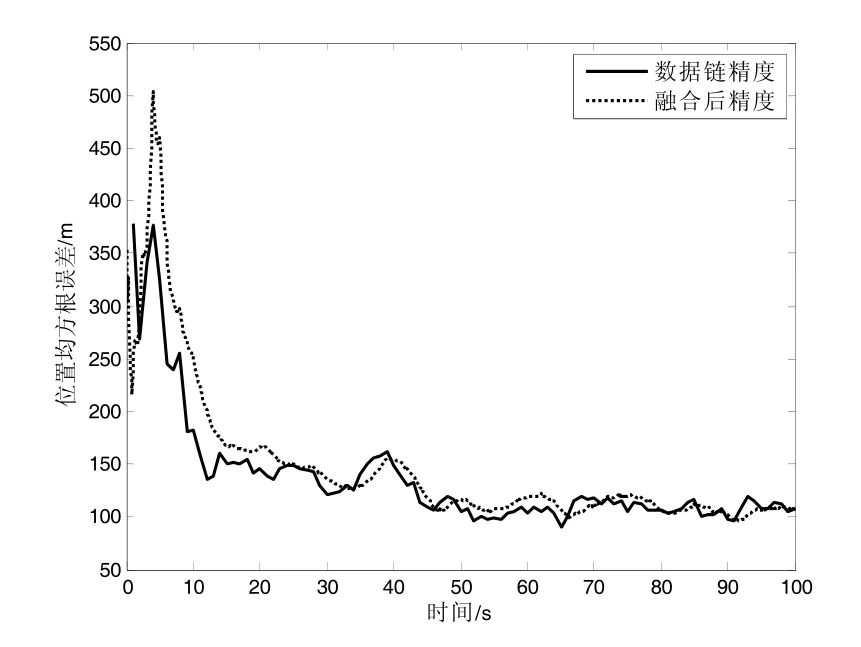
圖4 場景1 位置精度比較

圖5 場景2 距離精度比較
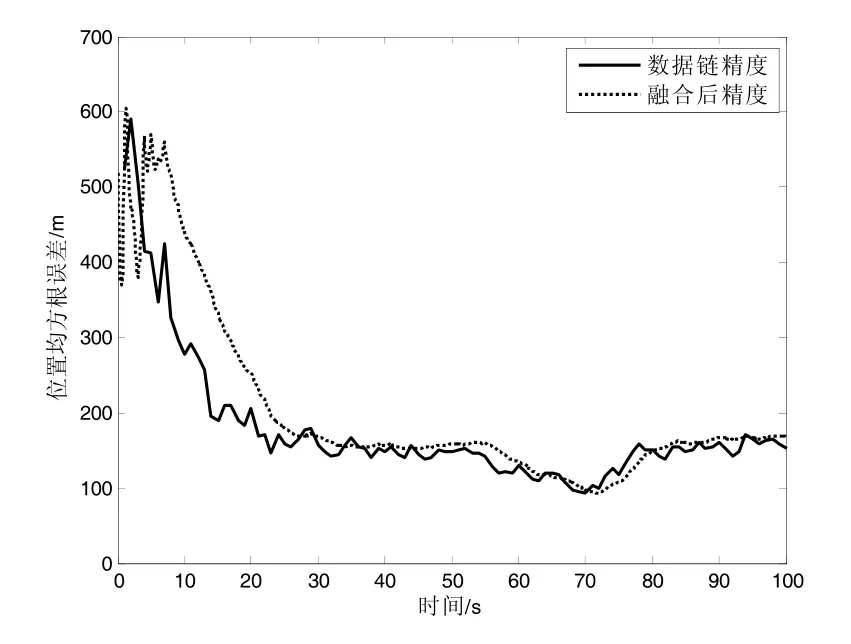
圖6 場景2 位置精度比較

圖7 場景3 距離精度比較
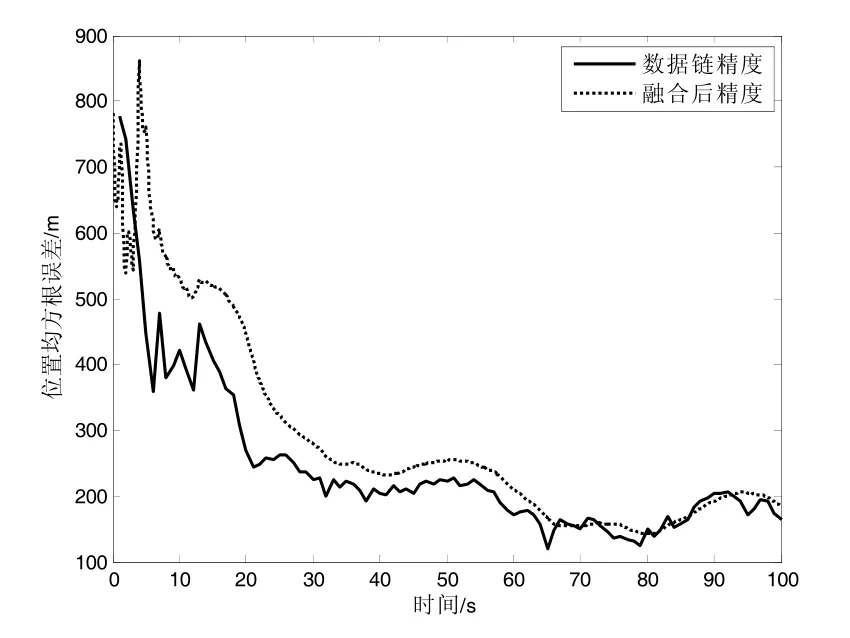
圖8 場景3 位置精度比較

表2 各場景下濾波平穩(wěn)后,數(shù)據(jù)鏈精度與融合后精度比較
1)從圖3、5、7 和表2 中場景1、2、3 的精度對比可以看出:數(shù)據(jù)鏈精度分別是200、300、400時,融合前后的距離精度均值分別是(59.84,66.67)、(80.07,88.14)、(100.2,110.9),數(shù)據(jù)鏈航跡和融合后航跡的精度與隨著數(shù)據(jù)鏈誤差的增大而下降。
2)從圖4、6、8 和表2 中場景1、2、3 的精度對比看出:數(shù)據(jù)鏈精度分別是200、300、400 時,融合前后的位置精度均值分別是(97.15,100.5)、(144.8,153.4)、(189.1,204.6),數(shù)據(jù)鏈航跡和融合后航跡的精度與隨著數(shù)據(jù)鏈誤差的增大而下降。
在仿真中發(fā)現(xiàn):場景1、2、3 中ESM 的測角精度都低于數(shù)據(jù)鏈轉(zhuǎn)換后的測角精度,融合后的位置精度差于數(shù)據(jù)鏈的位置精度。
2.2 傳感器數(shù)據(jù)率對跟蹤精度的影響分析
設(shè)在整個跟蹤過程中,數(shù)據(jù)鏈X、Y、Z方向上均方根誤差σX=σY=σZ=400 m;ESM 方位角、俯仰角均方根誤差為σA=σP=0.3°。分以下4 種情況進(jìn)行分析,見表3,仿真結(jié)果如圖9~16 所示。

表3 各場景下數(shù)據(jù)鏈測量周期和ESM 測量周期
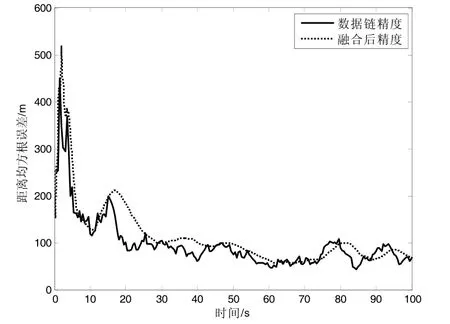
圖9 場景1 距離精度比較
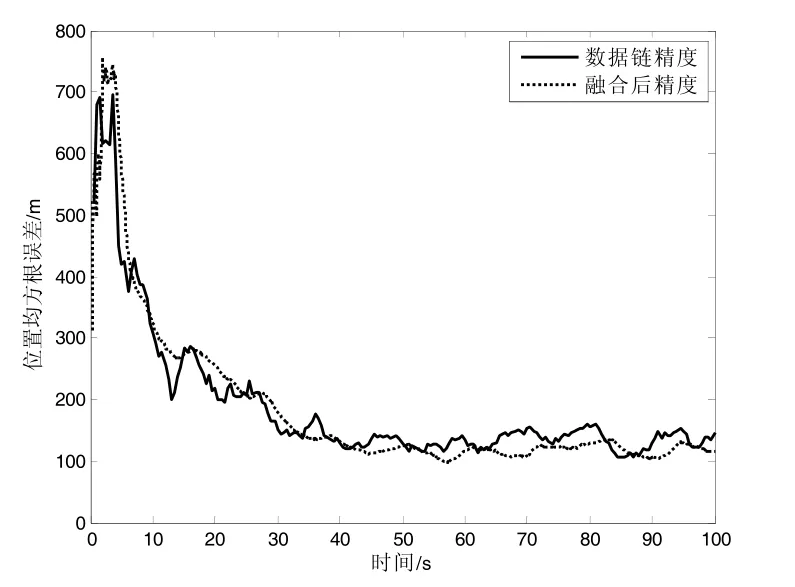
圖10 場景1 位置精度比較
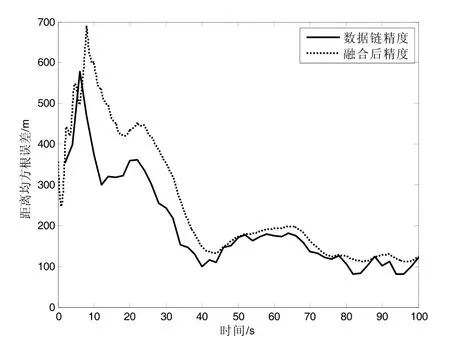
圖11 場景2 距離精度比較
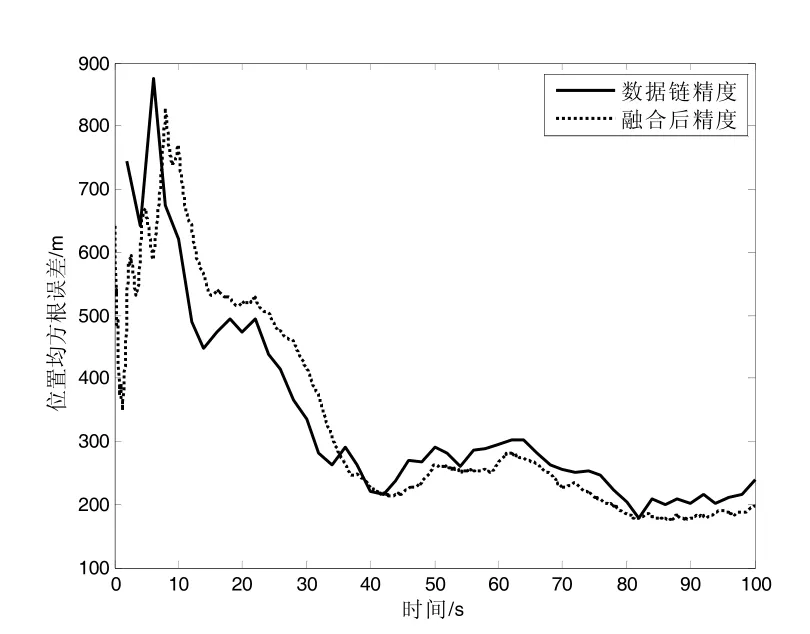
圖12 場景2 位置精度比較
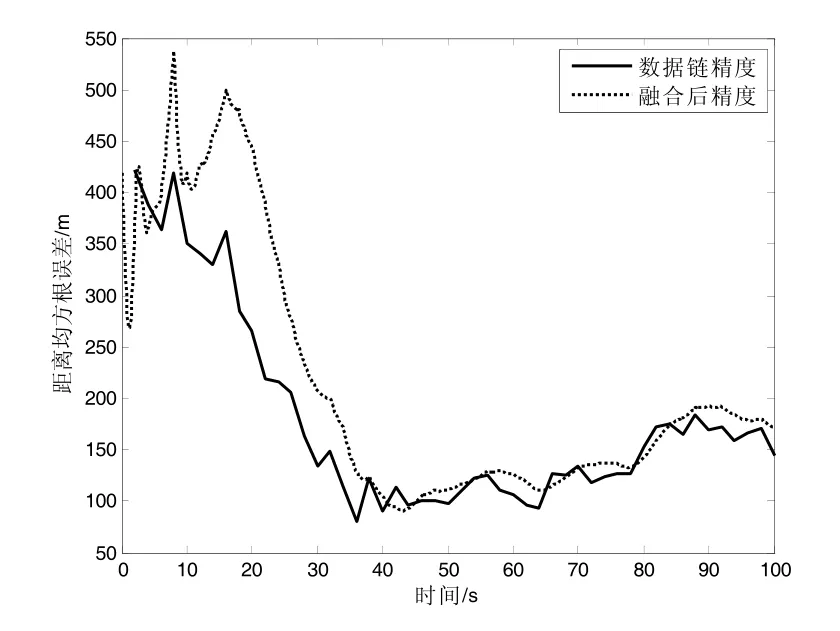
圖13 場景3 距離精度比較
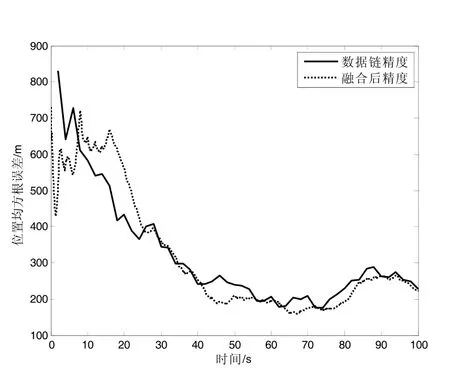
圖14 場景3 位置精度比較
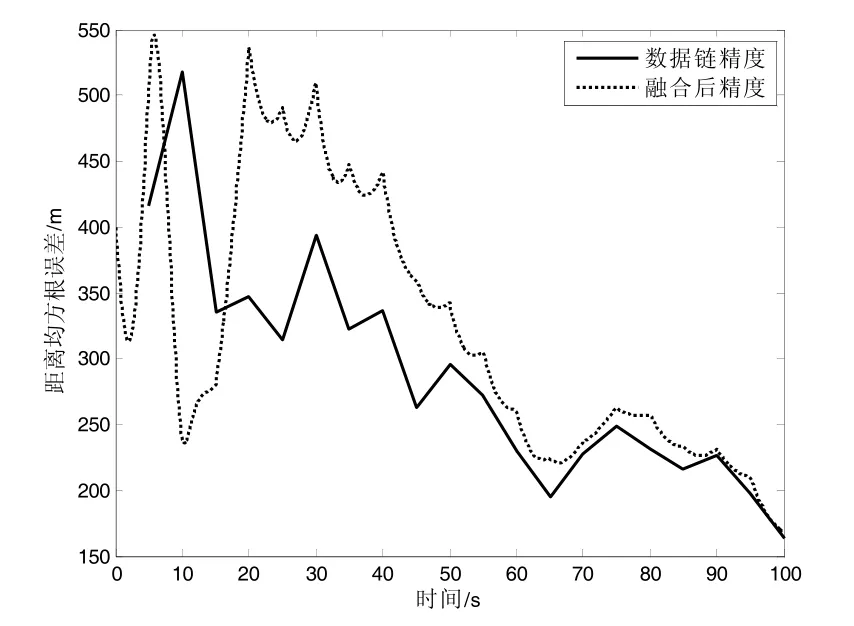
圖15 場景4 距離精度比較
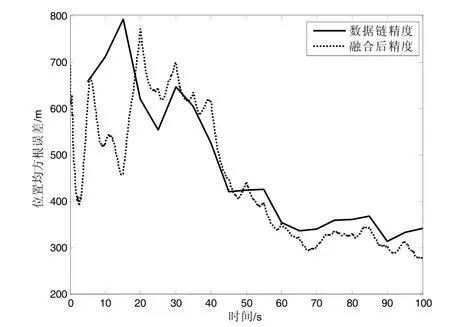
圖16 場景4 位置精度比較
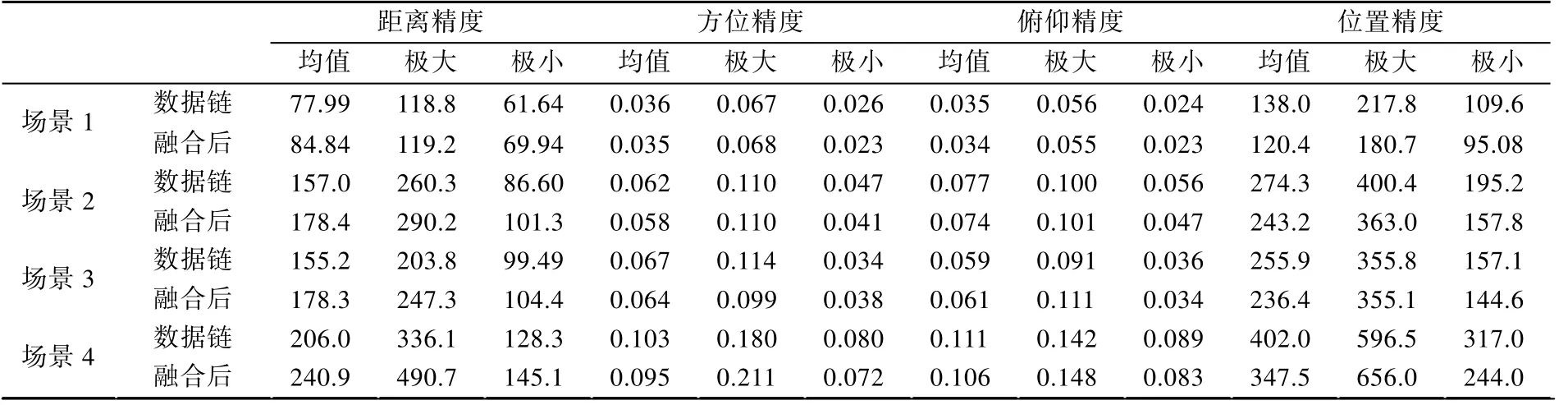
表4 各場景下濾波平穩(wěn)后,數(shù)據(jù)鏈精度與融合后精度比較
1)從圖9、10(TD=0.5)、圖13、14(TD=1)與圖15、16(TD=5)和表2 中場景1、3、4 的各種精度數(shù)據(jù)可知,數(shù)據(jù)鏈的數(shù)據(jù)率從0.5 s 下降到1 s 再到5 s一個數(shù)據(jù)時,其跟蹤精度明顯下降,融合后的精度在測距精度上從84.84 m 下降到178.4 m 再到240.9 m,位置精度從120.4 m 下降到236.4 m 再到347.5 m。
2)從圖13(TE=0.05)、15(TE=0.1)和表4 中場景2、3 的位置精度數(shù)據(jù)可知,當(dāng)數(shù)據(jù)鏈的數(shù)據(jù)率不變時,提高ESM 的數(shù)據(jù)率對跟蹤精度的影響并不明顯。這說明融合后的精度主要由數(shù)據(jù)鏈的數(shù)據(jù)率決定,與ESM 的數(shù)據(jù)率關(guān)系不大。
2.3 平臺運動特性對跟蹤精度的影響分析
數(shù)據(jù)鏈X、Y、Z方向上σX=σY=σZ=0.3km,測量周期TD= 1s;ESM 方位角、俯仰角均方根誤差為σA=σP=0.3°,ESM 測量周期TE=0.1s。除說明,以下仿真均按此條件給出。分4 種情況進(jìn)行分析,見表5,仿真結(jié)果如圖17~24 所示。

表5 各場景下的平臺運動方式
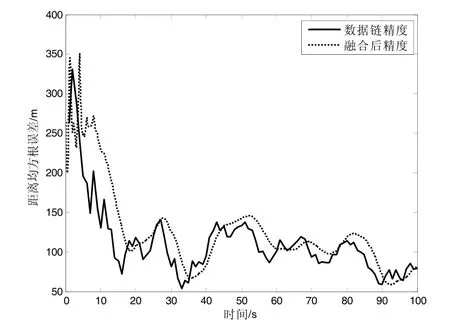
圖17 場景1 距離精度比較

圖18 場景1 位置精度比較
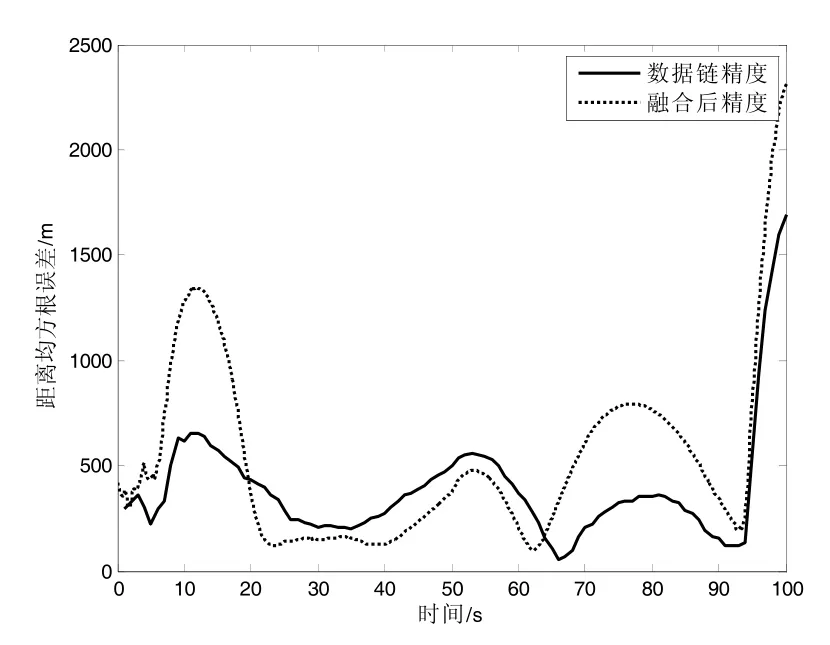
圖19 場景2 距離精度比較
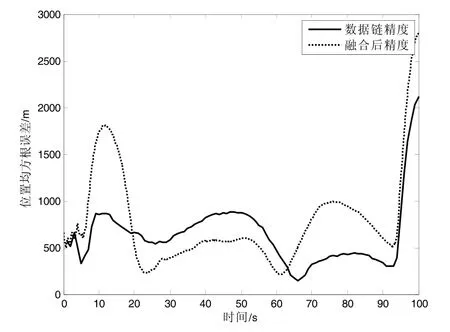
圖20 場景2 位置精度比較
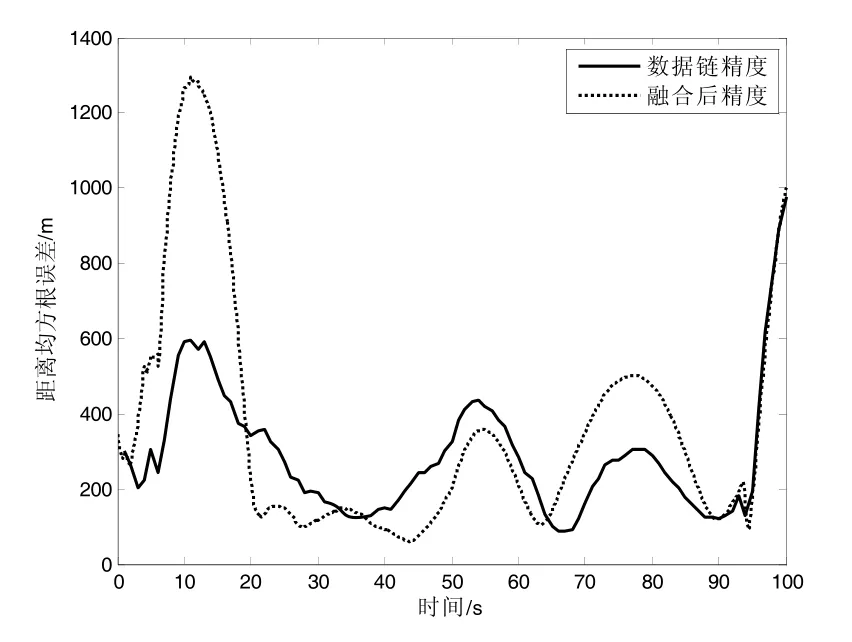
圖21 場景3 距離精度比較
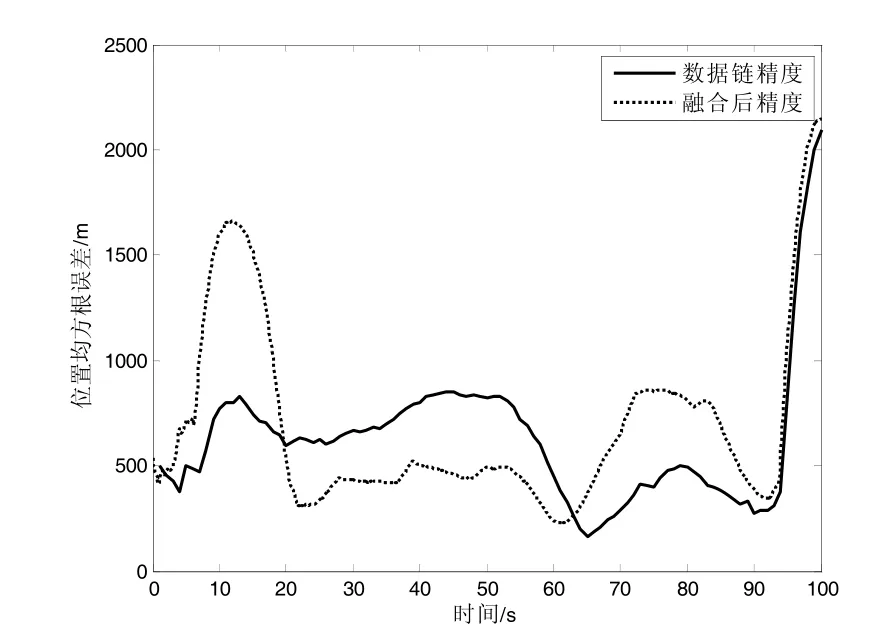
圖22 場景3 位置精度比較
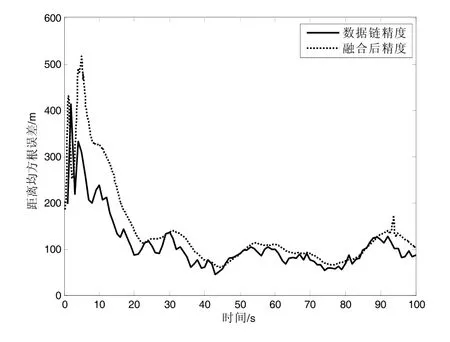
圖23 場景4 距離精度比較
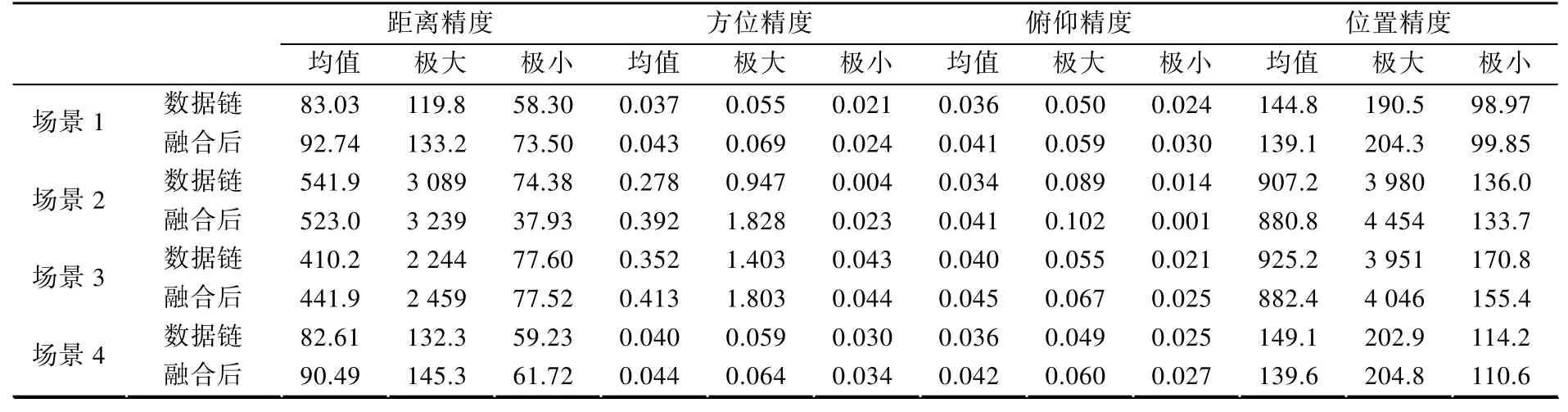
表6 各場景下濾波平穩(wěn)后,數(shù)據(jù)鏈精度與融合后精度比較
由仿真結(jié)果可得如下結(jié)論:
1)比較圖18、20、22、24 和表6 中場景1、2、3、4 可知,藍(lán)機(jī)和紅機(jī)在相同方向上同時做勻加速直線運動或者之字形運動(場景1、4),相對的加速度為0 時,融合后的位置精度均值分別是139.1 m和139.6 m,跟蹤精度較高;藍(lán)機(jī)做勻加速直線運動而紅機(jī)做之字形運動或者藍(lán)機(jī)做之字形運動而紅機(jī)做勻加速直線運動(場景2、3),存在相對的加速度時,融合后的位置精度均值分別是880.8 m 和882.4 m,跟蹤精度較差。
2)比較圖20、24 和表6 中場景2、4 可知,當(dāng)藍(lán)機(jī)做之字形運動時,紅機(jī)以勻加速直線和之字形跟蹤位置精度均值分別是880.8 m 和139.6 m,紅機(jī)以之字形跟蹤可以提高融合精度。
3)比較圖18、22 和表6 中場景1、3 可知,當(dāng)藍(lán)機(jī)勻加速直線運動時,紅機(jī)以勻加速直線和之字形跟蹤位置精度均值分別是139.1 m 和882.4 m,紅機(jī)以之字形運動方式跟蹤,存在相對的加速度,對提高融合精度沒有幫助。
3 結(jié)論
本文針對數(shù)據(jù)鏈航跡和間斷ESM 航跡關(guān)聯(lián)融合的情況,通過仿真研究了不同精度、不同數(shù)據(jù)率和不同平臺運動特性對融合精度的影響,研究表明,ESM 的測角精度通常低于數(shù)據(jù)鏈轉(zhuǎn)換后的測角精度,融合后的位置精度也通常低于數(shù)據(jù)鏈的位置精度,當(dāng)數(shù)據(jù)鏈的數(shù)據(jù)率不變時提高ESM 的數(shù)據(jù)率對跟蹤精度的影響并不明顯。這些結(jié)論對實際的機(jī)載數(shù)據(jù)融合處理具有一定的參考和借鑒價值。
[1] 李勇, 王德功, 常碩. 基于多傳感器數(shù)據(jù)融合的飛機(jī)目標(biāo)自動敵我識別方法[J]. 四川兵工學(xué)報, 2012,33 (1):33-35.
[2] 黃鶴. 機(jī)載多傳感器數(shù)據(jù)融合的數(shù)據(jù)鏈應(yīng)用技術(shù)[J]. 電訊技術(shù), 2004,(4):103-106.
[3] TRANI P, ANTOINE P. MPM for radar data link and ECM systems[C]. Kitakyushu: IEEE, IVEC, 2007:403- 404.
[4] SCHMITT M. Coordinating the global information grid initiative with the NG9-1-1 initiative[C]. Bangkok. Thailand: IEEE, ICMIT, 2008:415-420.
[5] 陳穎, 成曉嵐. 數(shù)據(jù)鏈在外軍裝備中的應(yīng)用及關(guān)鍵技術(shù)[J]. 航空電子技術(shù), 2004,35(4):43-48.
[6] RONG LANG, WANG WEICHANG, LOGAN M, et al. Multiplatform multisensor fusion with adaptive-rate data communication[J]. IEEE Trans. on AES, 1997,33 (1):274-281.
[7] GONZALES D, HOLLYWOOD J, KINGSTON G. Network-centric operations case study: air-to-air combat with and without link 16[R]. Santa Monica, CA, USA: RAND National Defense Res. Insti. Santa Monica, 2005.
[8] 何友, 王國宏, 等. 多傳感器信息融合及應(yīng)用[M]. 2版. 北京: 電子工業(yè)出版社, 2007:212-233.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
