線陣CCD在風洞軌跡測量試驗技術中的應用研究
2012-04-15 10:54:24段丕軒劉麗萍
實驗流體力學 2012年5期
梁 磊,段丕軒,劉麗萍,王 丹
(中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引 言
線陣CCD作為非接觸實時空間位移測量的技術手段在國外已經廣泛應用。加拿大NDI公司的Optotrak系統精度可達0.1mm,已用于蘭利中心、阿姆斯中心的靜彈和顫振試驗,以及德國/荷蘭風洞(DNW)的機翼變形測量和投放試驗[1]。國內清華大學和哈爾濱工業大學開展了類似系統的研究,主要應用于醫學輔助和姿態測量,精度為0.36mm[2-4]。同線陣CCD測量技術相比,面陣CCD圖像數據量大,受數據傳輸速度的影響,不可能做到高速實時重建坐標,精度也不夠高。相對于面陣CCD,線陣CCD的數據量往往要小數千倍,同時線分辨率往往要高數倍,因此線陣CCD在獲取模型姿態角、變形量、振動等參數上比面陣CCD具有更多的優勢。
國內利用線陣CCD技術進行空間測量還處在研究階段,筆者介紹了一種利用線陣CCD技術進行空間軌跡測量的方法。
1 系統組成

圖1 光學系統結構圖Fig.1 Schematic of optical system
系統原理見圖1,3個一維成像單元組成光學系統,覆蓋在同一區域,其中兩個相機的柱面鏡水平擺放,另外一個相機的柱面鏡垂直擺放,能夠確定3個相交平面。柱面透鏡實現從點到線的光學變換,像點確定一個包含被測點的平面,由3個相交平面得到被測點的位置。一維成像單元中,采用東芝TCD1501D線陣CCD作為圖像傳感器,和50mm焦距的柱面透鏡光心線相互垂直,線陣CCD位于柱面透鏡的焦平面上。
如圖2,采用7系數直接線性變換(DLT,Direct Linear Transformation)完成相機校準和坐標重建。
研制的基于線陣CCD的實時空間位移測量系統見圖3。主要由有源標識、光學系統、采集處理系統、自動標定系統、采集與標定軟件組成。線陣CCD測量系統結構框圖見圖4。

圖2 直接線性變換坐標測量過程Fig.2 Measurement process using direct linear transformation

圖3 基于線陣CCD的實時空間位移測量系統Fig.3 Real-time spatial displacement measurement system based on linear CCD
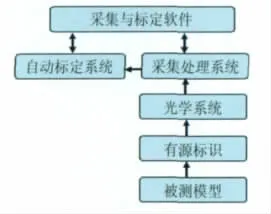
圖4 系統結構框圖Fig.4 System structure diagram
2 信號處理方法研究
信號處理是技術應用的關鍵。通過實踐研究,提出了一種基于特征邊緣提取的組合特征定位WBT算法,對原始信號先進行小波降噪,再使用B樣條插值10倍細分,最后取3個階梯閾值與峰值加權計算,可以有效地提高系統精確度。
2.1 小波變換降噪
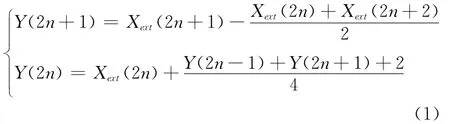
Swdldens等人提出了一種完全在時空域構造小波的提升算法(Lifting scheme),5/3提升小波只有一次預測和更新的過程,系數為2的冪次,從追求運算速度和縮小硬件面積的角度看,5/3提升小波更有優勢,因此小波變換降噪采用該方法。
提升公式:
逆變換公式:
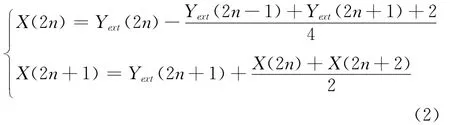
其中,X(n)為邊界擴展后的輸入信號;Y(n)為輸出信號。
應用到線陣CCD信號處理中,波形見圖5,坐標精度改善結果見表1。
小波降噪后波形進行了一定的平滑處理,雖然在總體來說修正點數不多,但處理之后,對系統精度有明顯提高,x軸精確度從0.31mm提高到0.17mm。

表1 小波降噪重建坐標精確度對比Table 1 Accuracy comparison of coordinate reconstruction using wavelet de-noise
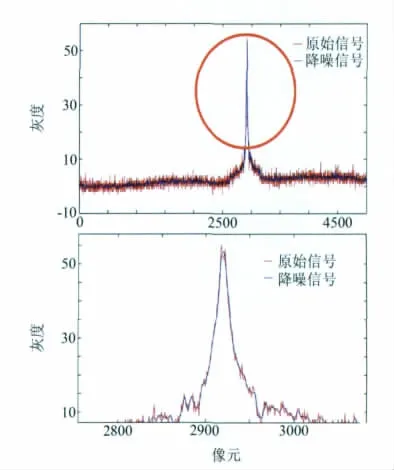
圖5 小波降噪波形及局部放大Fig.5 Wavelet de-nolse wavefrom and detail view
2.2 加權閾值峰值定位
對數據深入分析,可知道信號邊緣帶有更多的信息。峰值也是一種特殊的邊緣。單純計算峰值可能會損失有用的信息。以峰值的0.9,0.8,0.7倍分別作為階梯閾值,其與波形相截得到的坐標值的1/2,求得一個邊緣中心平均值,將該3個值與峰值加權平均,越靠近峰值權值越重。
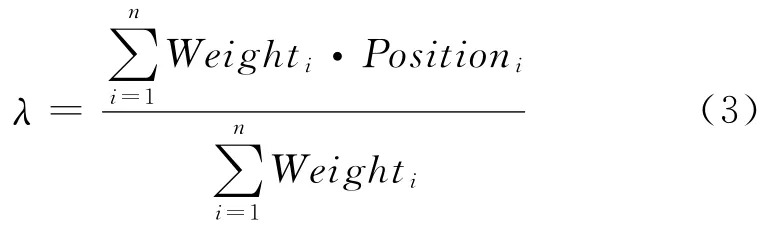
其中,λ為有源標識中心位置;Weighti為第i個閾值的權值;Positioni為第i個閾值截線中心位置;n為閾值的個數,這里取n=4。
計算結果波形見圖6,坐標精度改善結果見表2,系統精度有明顯改善。

圖6 加權閾值峰值定位波形Fig.6 Waveform of weighted threshold and peak positioning

表2 加權閾值峰值定位重建坐標精確度對比Table 2 Accuracy comparison of coordinate reconstruction using weighted threshold and peak positioning
2.3 B樣條插值細分
小波降噪后的波形仍然是像素級的,采用加權閾值峰值默認兩個像素之間是直線連接。為了得到精度高的亞像素邊緣,通過B樣條插值對相鄰兩個像素進行10倍細分,之后再用加權閾值峰值來從邊緣值求中心點。

其中,y為對應內節點的坐標值;N為內節點數;ci為控制系數向量(x)為k次B樣條基函數。
處理波形見圖7,坐標重建精確度對比見表3,可以獲得更優化的結果精確度。

圖7 B樣條插值細分波形Fig.7 B-spline interpolation subdivision waveform

表3 B樣條插值細分重建坐標精確度對比Table 3 Accuracy comparison of coordinate reconstruction using B-spline interpolation subdivision
3 光學系統抗震研究
風洞試驗現場洞壁、地板等環境振動很強,造成的相機振動對非接觸測量結果有較大影響。采用B&K3625激振器模擬風洞振動源,對系統分別施加低頻單一頻率振動和高頻隨機振動,對振動影響進行研究。
如圖8,在3個線陣CCD相機上分別安裝B&K4524-B三軸加速度傳感器,在相機測量空間靜止點坐標的同時,使用FOCUSII動態信號分析儀采集振動信號。

圖8 采集相機振動信號Fig.8 Camera vibration signal acquisition
實驗結果如圖9,分析試驗結果得知,高頻隨機振動影響了成像質量,使得信號邊緣模糊、波形展寬和變形,特征定位難度增加;低頻振動對像中心位置影響較大,直接導致坐標重建誤差增大。試驗表明,采用組合特征定位WBT算法可以有效對抗高頻噪聲造成的像質模糊、波形展寬和變形,降低了高頻隨機噪聲的影響。


圖9 振動模擬試驗結果Fig.9 Result of vibration simulation test
采用多周期平均法可以有效提高低頻振動時坐標重建的準確性,但對系統的實時性造成一定影響。通過對組合特征定位WBT算法和多周期平均算法的應用,可以使系統的測量精度得到保障。
4 系統應用
由于重大冰雪災害,致使承擔電力運輸任務的輸電線大量結冰,在覆冰導線空氣動力特性和舞動特性的雙重作用下,大量輸電線扭斷,輸電塔倒塌,電力系統遭受嚴重破壞。本研究應用線陣CCD系統測量覆冰輸電導線風洞試驗中的舞動軌跡。
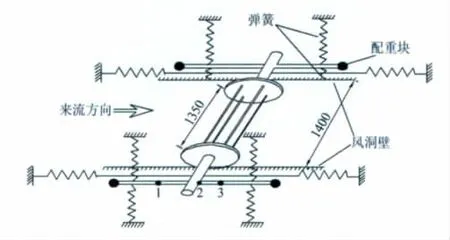
圖10 導線舞動試驗裝置示意圖Fig.10 Schematic of conductor galloping locus test device
利用線陣CCD測量系統在1.4m×1.4m風洞測量某型覆冰導線在不同的風速、不同截面形狀的覆冰和不同的迎角下的導線群舞動軌跡測量試驗。試驗裝置如圖10,試驗內容見表4,采集頻率為80Hz,結果數據見圖11~12,通過試驗完成了新月形和扇形覆冰導線舞動規律研究[5]。

表4 舞動試驗內容Table 4 Coment of conductor galloping locus test

圖11 某型覆冰單導線風洞試驗軌跡Fig.11 Locus of single-iced-conductor in wind tunnel

圖12 某型覆冰分裂導線風洞試驗軌跡Fig.12 Locus of bundle-iced-conductor in wind tunnel
5 結 論
(a)利用線陣CCD對低速風洞模型運動軌跡進行測量,具有實時性好、精度高、靈活方便、性價比高的特點,X、Y軸測量精確度可達到0.14mm,Z軸測量精確度可達到0.60mm;
(b)基于邊緣特征提取的組合特征定位 WBT算法,包括小波變換、B樣條插值和加權閾值峰值等復合處理技術,較好的抑制了圖像噪聲和外部高頻振動的影響,實現了高精度的亞像素細分定位,定位精度提高54%;
(c)新月形和扇形覆冰單導線發生舞動時運動軌跡均是橢圓形,舞動達到穩定態時,水平位移和豎向位移隨時間基本不變。導線舞動時最大雙邊振幅可達140mm,是導線直徑的5倍以上。隨著風速的增加,舞動軌跡振幅增大,風速增大到一定程度后舞動將失穩;新月形冰型導線舞動振幅隨風速的變化相對明顯一些。冰型厚度越大,舞動起始風速越低。參考文獻:
[1] 周述光,溫渝昌,金啟剛.風洞模型位移光學測量技術應用綜述[J].實驗流體力學,2009,23(2):94-99.
[2] 吳劍,王廣志,丁海曙,等.三維測量系統中線性CCD相機的直接線性變換[J].清華大學學報(自然科學版),2004,44(6):860-863.
[3] 艾莉莉,袁峰,丁振良.應用線陣CCD的空間目標外姿態測量系統[J].光學精密工程,2008,16(1):161-165.
[4] 李晶,袁峰,丁振良.基于BP神經網絡的外姿態測量系統線陣CCD標定[J].儀器儀表學報,2010,31(5):1138-1141.
[5] 王丹,黃漢杰.覆冰導線模型1.4米×1.4米風洞試驗報告[R].CARDC報告,2009.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
山東煤炭科技(2020年1期)2020-03-06 06:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
計算物理(2014年2期)2014-03-11 17:01:44
高考金刊·理科版(2012年3期)2012-01-01 00:00:00
