分布式衛(wèi)星SAR相位同步的實(shí)現(xiàn)方案及試驗(yàn)驗(yàn)證
2012-04-29 06:38:22李世強(qiáng)禹衛(wèi)東
電子與信息學(xué)報(bào) 2012年2期
關(guān)鍵詞:信號(hào)
李世強(qiáng) 禹衛(wèi)東
(中國科學(xué)院電子學(xué)研究所航天微波遙感系統(tǒng)部 北京 100190)
1 引言
分布式衛(wèi)星合成孔徑雷達(dá)(SAR)系統(tǒng)由兩顆或兩顆以上的衛(wèi)星構(gòu)成,其中一顆衛(wèi)星(主星)發(fā)射雷達(dá)信號(hào)并接收回波,其它衛(wèi)星(輔星)只被動(dòng)接收回波信號(hào)。分布式衛(wèi)星SAR系統(tǒng)容易形成較長且穩(wěn)定的基線,特別適用于高精度干涉SAR(InSAR)測高應(yīng)用。
在分布式衛(wèi)星InSAR系統(tǒng)中,主星和輔星成像后各自生成單視復(fù)圖像,對(duì)兩幅單視復(fù)圖像進(jìn)行相干處理,不同地形高度在干涉圖中反映為不同的干涉相位,通過對(duì)干涉相位的分析可以獲得地表的高程數(shù)據(jù)[1]。理想情況下要求干涉相位中僅包含地形高度引入的成份。實(shí)際上,由于主星與輔星各自采用不同的晶振,它們的回波信號(hào)中會(huì)存在由晶振頻率偏差和相位噪聲等引入的相位誤差,因此,為了保證分布式衛(wèi)星SAR系統(tǒng)的正常工作,需要解決衛(wèi)星之間的相位同步問題。文獻(xiàn)[2]討論了分布式SAR對(duì)雷達(dá)基準(zhǔn)頻率信號(hào)相干性的特殊要求(不同于單站SAR),文獻(xiàn)[3]討論了頻率源相位噪聲在分布式SAR中引入相位誤差的機(jī)理,并提出了分布式SAR相位同步方案的初步設(shè)想,在此基礎(chǔ)上,文獻(xiàn)[4]提出了用于TanDEM-X的相位同步實(shí)現(xiàn)方案,該方案在測量相位同步誤差的過程中,采樣頻率遠(yuǎn)小于兩顆衛(wèi)星的雷達(dá)載波頻率差,造成相位誤差提取過程中出現(xiàn)模糊,增加了相位誤差提取和補(bǔ)償?shù)碾y度。
本文提出了一種分布式衛(wèi)星SAR相位同步的改進(jìn)方案,采用基于GPS馴服晶振的雙向?qū)飨辔煌矫}沖的方案,經(jīng)過GPS馴服后雷達(dá)載波頻率差小于 1 Hz,使得相位誤差測量過程中的采樣滿足Nyquist定理,可大大簡化相位同步誤差提取和補(bǔ)償?shù)膹?fù)雜性,提高了相位同步的可靠性。本文在介紹相位同步實(shí)現(xiàn)方案的基礎(chǔ)上,分析了影響相位同步性能的因素,討論了相位同步工程實(shí)現(xiàn)需要解決的幾個(gè)問題,通過地面試驗(yàn)驗(yàn)證了本文方案的性能。
2 相位同步實(shí)現(xiàn)方案
在分布式衛(wèi)星SAR系統(tǒng)中,主星與輔星雷達(dá)載波的頻率偏差和相位噪聲將影響分布式 SAR成像以及干涉處理的性能,為了實(shí)現(xiàn)主星與輔星的相位同步,需要在主星與輔星之間建立一個(gè)共同的雷達(dá)載波相位參考,使得主星與輔星的雷達(dá)載波相位都與這一參考相位相同或接近。為此可以考慮在主星與輔星之間建立一個(gè)相位同步鏈路,通過對(duì)主星與輔星的雷達(dá)載波相位的雙向?qū)鳎o以相位補(bǔ)償處理,可在成像處理前實(shí)現(xiàn)相位同步。
2.1 相位同步方案原理
在分布式衛(wèi)星SAR中,造成主星與輔星相位同步誤差的主要因素是雷達(dá)載波的頻率偏差和相位噪聲,從原理上來說,只要通過雷達(dá)載波的雙向?qū)鳎@得主星與輔星的頻率差和相位噪聲信號(hào)(如圖1所示),用它補(bǔ)償輔星接收回波,即可實(shí)現(xiàn)相位同步。圖中f1和f2分別為主星與輔星的雷達(dá)載波頻率,Δf為主輔星頻率差。
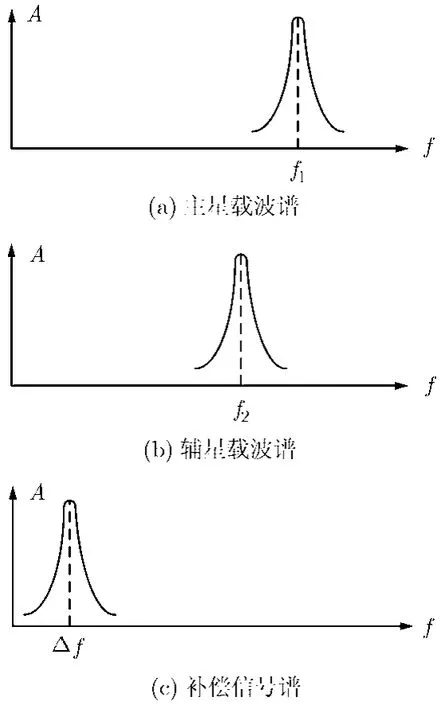
圖1 主輔星載波譜及補(bǔ)償信號(hào)譜
根據(jù)以上原理,Younis等人[5,6]提出了一種相位同步實(shí)現(xiàn)方案,用于TanDEM-X系統(tǒng)中,即在SAR工作過程中,雙向?qū)飨辔煌叫盘?hào),解調(diào)后隨原始數(shù)據(jù)下傳,地面處理時(shí)提取相位同步誤差,補(bǔ)償輔星回波實(shí)現(xiàn)相位同步。這種方案中主星與輔星雷達(dá)基準(zhǔn)頻率源各自獨(dú)立采用高穩(wěn)晶振,由于晶振頻率準(zhǔn)確度一般在 1 0-6量級(jí),使得主星與輔星的X波段雷達(dá)載波頻率差有可能接近20 kHz,遠(yuǎn)大于同步脈沖重復(fù)頻率。而同步脈沖雙向傳輸過程相當(dāng)于是用同步脈沖重復(fù)頻率fsyn對(duì)相位同步誤差信號(hào)進(jìn)行采樣,使得相位誤差提取比較復(fù)雜,需要實(shí)時(shí)測量主星與輔星的頻率差,據(jù)此進(jìn)行相位解模糊[7]。
本文在以上相位同步方案基礎(chǔ)上,提出一種改進(jìn)方案,即基于GPS馴服晶振的相位同步脈沖雙向?qū)鞣桨福椒桨敢c(diǎn)如下:
(1)主星與輔星的基準(zhǔn)頻率源采用 GPS馴服晶振,由于 GPS衛(wèi)星上采用的原子鐘頻率準(zhǔn)確度在10-12量級(jí)以上[8],使得馴服后主星與輔星雷達(dá)載波頻率差足夠小。
(2)采用同步喇叭天線在主星與輔星之間交替?zhèn)鬏斚辔煌矫}沖信號(hào),在同步脈沖傳輸過程中,正常的雙站SAR數(shù)據(jù)錄取被周期性打斷,雷達(dá)發(fā)射信號(hào)從SAR主天線被切換到同步喇叭天線,主星發(fā)射的同步脈沖被輔星上的同步喇叭天線接收并采集,之后輔星經(jīng)過適當(dāng)延時(shí)再向主星發(fā)回一個(gè)同步脈沖信號(hào),完成一個(gè)同步脈沖交互周期,如此循環(huán)往復(fù)直到成像結(jié)束。
(3)主星與輔星對(duì)各自接收的相位同步脈沖分別進(jìn)行解調(diào)和數(shù)據(jù)采集,獲得的同步脈沖數(shù)據(jù)通過數(shù)傳系統(tǒng)下傳地面,地面處理中提取相位同步誤差,補(bǔ)償輔星回波,完成相位同步。
相位同步過程中的時(shí)間關(guān)系如圖 2所示。在t時(shí)刻,衛(wèi)星1發(fā)射相位同步脈沖信號(hào),經(jīng)過傳播延遲τ12后被衛(wèi)星2接收。經(jīng)過系統(tǒng)內(nèi)部延遲τsys后衛(wèi)星2在t+τsys時(shí)刻發(fā)射同步脈沖,經(jīng)傳播延遲τ21后被衛(wèi)星1接收,以上過程在雷達(dá)開機(jī)時(shí)間內(nèi)以同步脈沖重復(fù)頻率fsyn反復(fù)進(jìn)行。
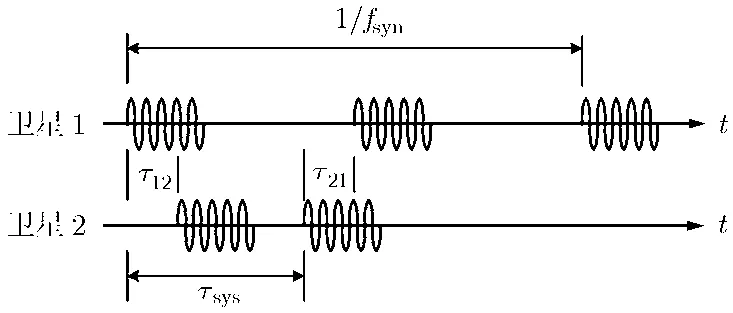
圖2 相位同步的時(shí)間關(guān)系
[9]可知,同步脈沖重復(fù)頻率一般可取為10 Hz左右,采用GPS馴服晶振后可保證主星與輔星的X波段雷達(dá)載波頻率差小于1 Hz,從而使同步脈沖重復(fù)頻率對(duì)相位誤差的采樣滿足 Nyquist采樣率,大大簡化地面處理中相位同步誤差的提取難度,這正是本文方案優(yōu)于Younis等人方案的特征之一。
GPS馴服晶振將石英晶體振蕩器優(yōu)良的短期穩(wěn)定特性和GPS信號(hào)良好的長期穩(wěn)定特性結(jié)合起來,GPS馴服晶振的原理如圖3所示。馴服電路實(shí)際上是一個(gè)鎖相環(huán),被馴晶振的輸出經(jīng)過分頻整形后產(chǎn)生秒脈沖(PPS)信號(hào),將其與 GPS接收機(jī)輸出的PPS脈沖比相得到相位差,對(duì)該相位差進(jìn)行數(shù)字濾波,并經(jīng)D/A轉(zhuǎn)換后得到誤差電壓,控制被馴晶振的壓控端實(shí)現(xiàn)頻率調(diào)整。
2.2 相位同步性能分析
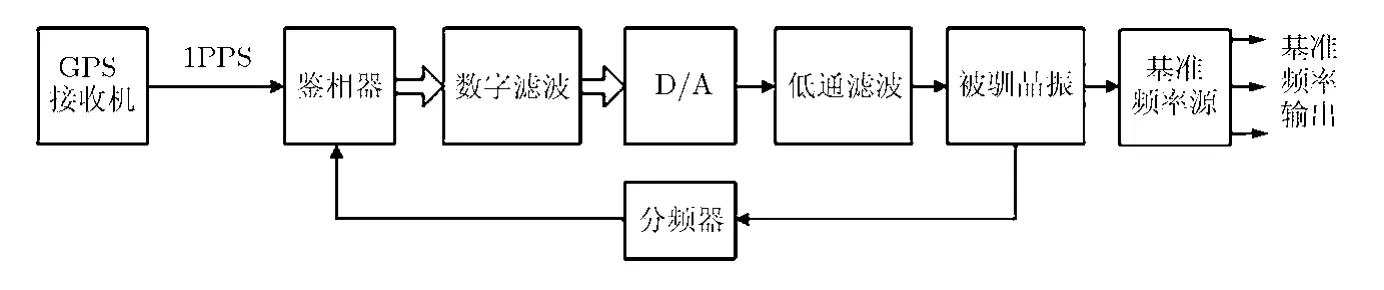
圖3 GPS馴服晶振原理框圖
根據(jù)前述相位同步實(shí)現(xiàn)方案,相位同步鏈路的硬件模型如圖4所示。從圖中可以看出,在相位同步脈沖傳輸過程中,造成相位變化的因素包括:發(fā)射和接收端的基準(zhǔn)頻率差Δfi,相位噪聲n?i,發(fā)射通道和接收通道的相位抖動(dòng)?sysTi與?sysRi,同步喇叭天線相位方向圖引入的相位變化?anti,接收機(jī)噪聲引起的相位誤差?SNRi,主星與輔星相對(duì)運(yùn)動(dòng)的多普勒效應(yīng)引起的相位變化2πΔd/λ等,其中i=1或2分別代表主星或輔星。
若令主星與輔星的雷達(dá)載波頻率為fi=f0+Δfi,其中f0為標(biāo)稱頻率,Δfi為衛(wèi)星i的頻率偏差。則t時(shí)刻衛(wèi)星i的雷達(dá)載波相位為

其中?0i為衛(wèi)星i的雷達(dá)載波初相,n?i為載波相位噪聲。

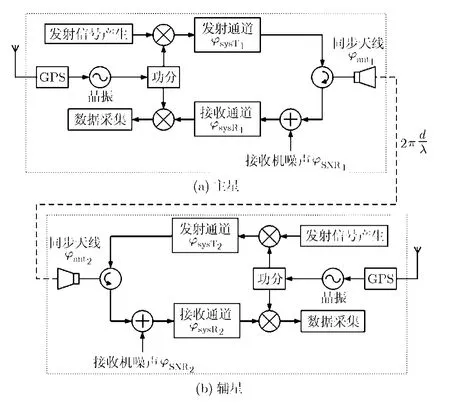
圖4 相位同步鏈路的硬件模型
提取補(bǔ)償相位的目的是獲取主星與輔星頻率偏差和相位噪聲引起的相位同步誤差,在此過程中引入的其它相位將成為影響相位同步性能的干擾相位。從式(2)中可知,第3項(xiàng)為主星與輔星頻率偏差形成的相位差,第5, 6項(xiàng)是相位噪聲形成的相位差,這些正是補(bǔ)償輔星回波相位,實(shí)現(xiàn)相位同步需要的成分。其它項(xiàng)均是在雙向同步脈沖傳輸過程中引入的額外相位誤差,將形成相位同步后的剩余相位誤差。其中第7項(xiàng)為接收機(jī)噪聲引入的相位誤差,第8, 9項(xiàng)為雷達(dá)收發(fā)通道相位抖動(dòng)引入的相位誤差,第10, 11項(xiàng)為一次相位同步脈沖對(duì)傳過程中,主星與輔星相對(duì)位置發(fā)生變化而又同步喇叭天線方向圖引入的相位誤差,式(2)等號(hào)右邊第1項(xiàng)為由衛(wèi)星相對(duì)運(yùn)動(dòng)的多普勒效應(yīng)引入的相位誤差。
根據(jù)分析,同步天線方向圖引入的相位誤差遠(yuǎn)小于1°,可以忽略;根據(jù)工程經(jīng)驗(yàn),雷達(dá)收發(fā)通道的相位抖動(dòng)一般可以控制在1°以內(nèi),對(duì)相位同步性能影響也較小[10];當(dāng)衛(wèi)星相對(duì)運(yùn)動(dòng)的速度穩(wěn)定或變化不大時(shí),多普勒效應(yīng)引入的相位近似為常數(shù),對(duì)相位同步性能影響較小,因此影響相位同步性能的主要因素將是接收機(jī)噪聲。
2.3 相位同步方案的工程實(shí)現(xiàn)
在相位同步方案的工程化實(shí)現(xiàn)過程中,需要考慮以下幾個(gè)問題,即相位同步脈沖定時(shí)的設(shè)計(jì)、同步脈沖的增益控制策略,以及同步脈沖的數(shù)據(jù)壓縮考慮。
(1)相位同步脈沖的定時(shí)設(shè)計(jì) 在相位同步脈沖傳輸時(shí),雷達(dá)信號(hào)需要從SAR天線切換到同步喇叭天線,為了給信號(hào)通路切換和天線狀態(tài)切換留出足夠的時(shí)間,需要同步脈沖發(fā)射時(shí)刻滯后于對(duì)地發(fā)射探測脈沖的時(shí)刻,同時(shí)控制數(shù)據(jù)采集起始的定時(shí)脈沖也與采集地面回波的時(shí)刻不同,因此需要定時(shí)信號(hào)周期性改變脈沖出現(xiàn)時(shí)刻。
(2)相位同步脈沖的增益控制 星載 SAR接收地面回波時(shí),考慮到不同地物后向散射特性的不同,需要采取增益控制措施保證接收通道增益與回波信號(hào)電平匹配。相位同步脈沖傳輸時(shí),由于主星與輔星相對(duì)距離和相對(duì)角度的變化,使得接收信號(hào)也會(huì)發(fā)生變化。考慮到雷達(dá)一次開機(jī)期間衛(wèi)星之間距離變化不大,并且相位同步信號(hào)傳輸鏈路始終位于同步喇叭天線的3 dB波束寬度內(nèi),使得同步脈沖信號(hào)電平變化范圍不大,因此可以采用固定增益實(shí)現(xiàn)同步脈沖的接收。
(3)相位同步脈沖的數(shù)據(jù)壓縮 星載 SAR接收地面回波時(shí),一般會(huì)對(duì)回波數(shù)據(jù)采用分塊自適應(yīng)量化(BAQ)算法進(jìn)行壓縮以降低數(shù)據(jù)率。BAQ是針對(duì)SAR原始數(shù)據(jù)零均值高斯分布的統(tǒng)計(jì)特性專門設(shè)計(jì)的壓縮算法,對(duì)SAR原始數(shù)據(jù)的壓縮性能較好。而相位同步脈沖在距離向只有一個(gè)脈沖的時(shí)間寬度,而且其幅度的統(tǒng)計(jì)特性與地面回波不同,因此不宜采用 BAQ壓縮算法。考慮到同步脈沖傳輸時(shí)之需要采集一個(gè)脈沖寬度的數(shù)據(jù),每個(gè)脈沖的數(shù)據(jù)量小于地面回波,因此可以考慮對(duì)相位同步脈沖不做數(shù)據(jù)壓縮,直接下傳。
3 相位同步性能驗(yàn)證
按照以上相位同步方案,研制了具有相位同步功能的主星與輔星的X波段雷達(dá)中央電子設(shè)備,開展了相位同步的地面驗(yàn)證試驗(yàn)。試驗(yàn)中首先測試了基于 GPS馴服晶振的主星與輔星射頻基準(zhǔn)頻率的準(zhǔn)確度,之后將兩套中央電子設(shè)備之間的相位同步鏈路連接好,開展了相位同步性能的測試。
測量 GPS馴服晶振的頻率準(zhǔn)確度時(shí),將 100 MHz的GPS馴服晶振信號(hào)通過中央電子設(shè)備的基準(zhǔn)頻率源倍頻到射頻基準(zhǔn)頻率9300 MHz,待GPS馴服晶振鎖定并穩(wěn)定一段時(shí)間后,利用頻率計(jì)測量倍頻后的信號(hào)頻率,共獲得5組測量數(shù)據(jù),每組測量數(shù)據(jù)大約為半小時(shí)的測量結(jié)果,圖5給出了各次測量結(jié)果的變化曲線,表1給出了5組測量結(jié)果的統(tǒng)計(jì)值,從表中可知,經(jīng)過GPS馴服后,X波段的基準(zhǔn)頻率偏差小于1 Hz,這位相位同步誤差的提取奠定了較好的基礎(chǔ)。
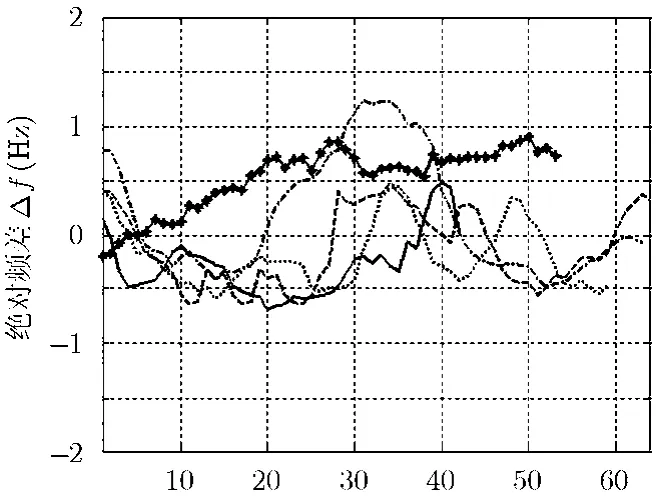
圖5 X波段基準(zhǔn)頻率的測量結(jié)果
測試相位同步性能時(shí)需要的設(shè)備及其連接關(guān)系見圖6所示。利用發(fā)射的LFM信號(hào)經(jīng)過衰減后分別模擬回波信號(hào)和相位同步脈沖信號(hào),對(duì)記錄的雷達(dá)數(shù)據(jù)進(jìn)行分析后可以獲得相位同步性能:圖7為主星和輔星回波相位歷程,其中實(shí)線為主星回波相位歷程,虛線為輔星回波相位歷程。從圖中可以看出,由于主星為自發(fā)自收工作,其相位基本不隨時(shí)間變化,而輔星接收信號(hào)是由主星發(fā)出的,其相位隨時(shí)間波動(dòng)。從圖8可看出,補(bǔ)償相位的變化歷程能夠較準(zhǔn)確地反映主輔星相位歷程差的變化趨勢;圖 9給出了主輔星相位歷程差與補(bǔ)償相位歷程的比較,以及利用補(bǔ)償相位補(bǔ)償輔星回波相位后剩余的相位同步誤差,其中圖9 (a)中實(shí)線為補(bǔ)償相位,虛線為回波相位差,可以看出,補(bǔ)償相位曲線與主輔星回波相位差曲線變化趨勢非常接近,說明補(bǔ)償相位可以較準(zhǔn)確地補(bǔ)償相位同步誤差;圖9(b)是相位補(bǔ)償后的剩余相位同步誤差,補(bǔ)償后剩余的相位同步誤差小于5.5°,可以滿足分布式衛(wèi)星SAR系統(tǒng)的需求。
4 結(jié)論
實(shí)現(xiàn)主星與輔星雷達(dá)信號(hào)的相位同步是分布式衛(wèi)星SAR正常工作的前提之一,為了簡化地面處理中相位同步誤差提取和補(bǔ)償?shù)膹?fù)雜度,本文提出了一種相位同步的改進(jìn)方案,分析了影響相位同步性能的因素,討論了工程實(shí)現(xiàn)時(shí)需要考慮的幾個(gè)問題,最后通過地面試驗(yàn)驗(yàn)證了本文提出方案的性能。

表1 5組測量結(jié)果的統(tǒng)計(jì)值(Hz)
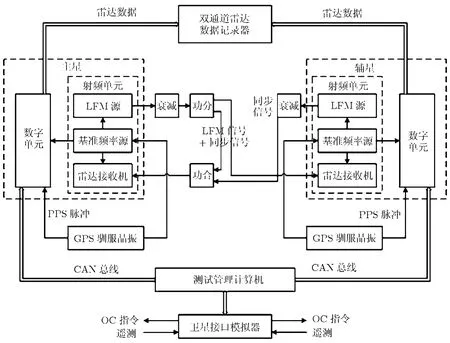
圖6 相位同步性能測試框圖
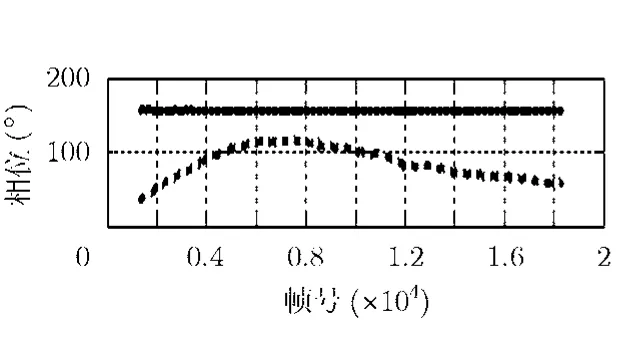
圖7 主星和輔星回波相位歷程
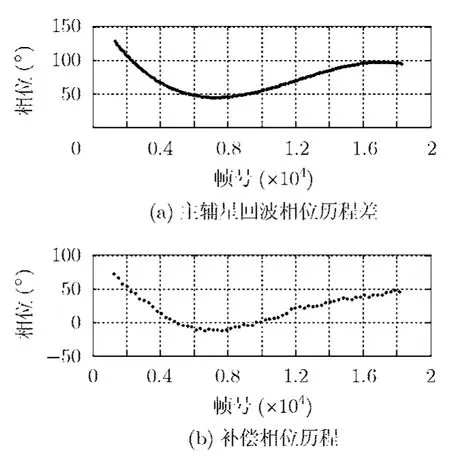
圖8 主輔星回波相位差與補(bǔ)償相位歷程

圖9 相位同步后的剩余相位誤差
參 考 文 獻(xiàn)
[1]Bamler R and Hartl P. Synthetic aperture radar interferometry[J].Inverse Problems, 1998, 14(4): R1-R54.
[2]Weiβ M. Time and frequency synchrozisation aspects for bistatic SAR systems[C]. Proceedings of EUSAR, Ulm Germany, 2004: 395-398.
[3]Krieger G and Younis M. Impact of oscillator noise in bistatic and multistatic SAR[J].IEEE Geoscience and Remote Sensing Letters, 2006, 3(3): 424-428.
[4]Krieger G, Hajnsek I, Papathanassiou K P,et al..Interferometric synthetic aperture radar (SAR)missions employing formation flying[J].Proceedings of IEEE, 2010,98(5): 816-843.
[5]Younis M, Metzig R, and Krieger G. Performance prediction of a phase synchronization link for bistatic SAR[J].IEEE Geoscience and Remote Sensing Letters, 2006, 3(3): 429-433.
[6]Younis M, Metzig R, Krieger G,et al.. Performance prediction and verification for the synchronization link of TanDEM-X[C]. Proceedings of EUSAR, Dresden Germany,2006: 5206-5209.
[7]Krieger G, Moreira A, Fiedler H,et al.. TanDEM-X: a satellite formation for high-resolution SAR interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,2007, 45(11): 3317-3341.
[8]劉基余. GPS衛(wèi)星導(dǎo)航定位原理與方法[M]. 北京: 科學(xué)出版社, 2003, 2, 3節(jié).
[9]Brautigam B, Gonzalez J H, Schwerdt M,et al.. TerraSAR-X instrument calibration results and extension for TanDEM-X[J].IEEE Transactions on Geoscience and Remote Sensing,2010, 48(2): 702-715.
[10]Gonzalez J H, Bachmann M, Krieger G,et al.. Development of the TanDEM-X calibration concept: analysis of systematic errors [J].IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(2): 716-726.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06