橋補結合電路技術在力傳感器中的應用及分析
2012-05-15 08:07:50李育德米哲敏
太原理工大學學報 2012年1期
關鍵詞:測量
李育德,米哲敏
(1.太原理工大學 材料科學與工程學院,太原030024;2.同濟大學 電子與信息工程學院,上海201804)
在做力及重量測量時,習慣的做法是將受力傳感器的輸出信號(傳感器信號)直接傳送給測量系統的前級放大部分,傳感器與測量系統之間僅僅保持有簡單的信號傳遞關系,且傳感器只有力、電轉換作用。盡管當代儀表技術已經進入智能化時代,并且達到盡善盡美的水平,但要實現高精度測量的同時對傳感器也提出較為苛刻的要求;而要想使傳感器獲得設計水平,儀表必須提供出高質量、高穩定的使用參數與條件。之所以互相要求條件之高,其根本原因是由于傳感器與儀表二者之間不存在模擬量平衡關系。
1 橋補結合電路及構成
由電阻應變片所組成的直流惠斯頓電橋(以下簡稱電橋)就是要產生因力作用于受力模型彈性體變形而相應使橋路輸出信號,這樣就直接把測力的過程簡單地轉變為測電的過程了。被測對象的轉變必然帶來測量方法與方式的不同,其誤差表達形式及計算過程等諸多因素均會對測得結果產生影響,這是因為直接測量轉變成間接測量而造成的。橋路問題是個古老的話題,為完善這一技術手段,多年來推出了非常多的解決問題的方法、思路;得出了相應的應用條件、公式及定理,并獲得很好的效果。在當今儀器、儀表高度發達的同時有必要對橋路作更深一步的研究,以便充分地倍加掌握這一經典技術。
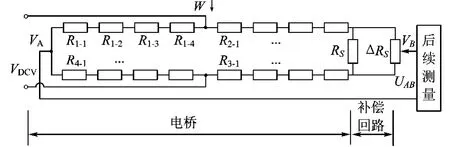
圖1 橋補結合電路
以四個傳感器組成一臺測力裝置系統為例說明。作橋補結合電路(以下簡稱橋補電路),如圖1所示。圖中:R1-1,…;R2-2,…;R3-3,…;R4-4,…代表各傳感器同一位置(名)上的應變計,RS為補償電壓的采樣電阻、RSδ為補償電阻。從圖中可以看出,橋補電路是由電橋與補償回路兩部分構成,并通過采樣電阻RS把這兩部分結合在一起的。當力W作用于傳感器后引起電橋輸出,使得后續測量電路得到一個輸入電壓信號UAB而引起數字補償系統工作,補償電阻RSδ是以數字形式對電橋輸出信號進行自動補償的(該補償是較為復雜的單元技術,為文字敘述方便,采用電位計的直觀圖形來代表該單元的轉換作用),直至達到電位VB=VA時補償自動停止,顯示部分同步顯示出測量數值。
2 橋補電路性能分析
從圖1可以看出,構成橋補電路的前提條件就是將各傳感器的四個應變計按“同一位置”的原則串接(或并接)來組成一個橋臂,然后再把組成的四個橋臂搭成一個電橋。這樣我們可以得出圖1的簡化圖,如圖2所示的橋補電路。在這個橋補電路圖中,∑Ri|i=1,2,3,4表示同一位置的應變計阻值之和;∑ΔRi|=1,2,3,4表示同一位置的應變計阻值變量之和,用ΔRS取代補償回路RS∥RSδ,∑RL,∑RR分別表示左、右半橋應變計阻值之和;∑ΔRL,∑ΔRR分別表示左、右半橋應變計阻值變量之和。
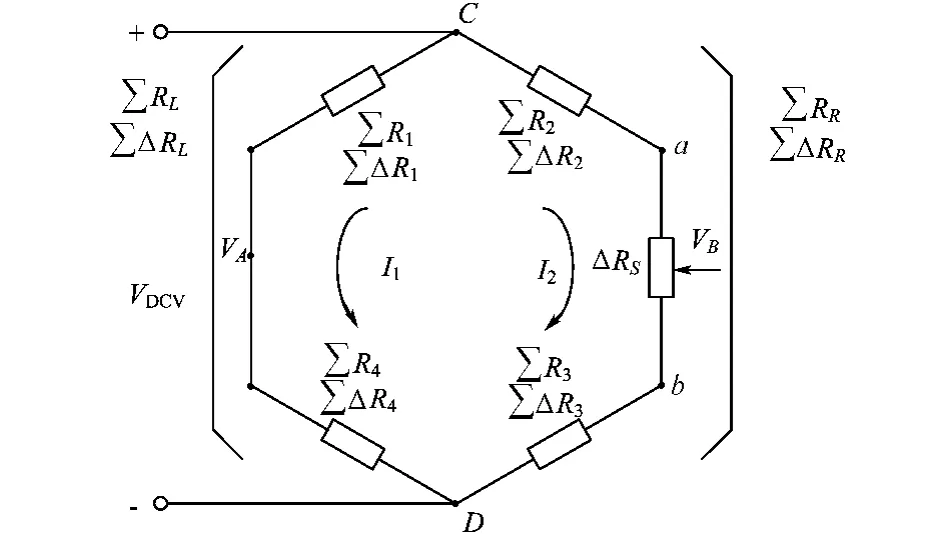
圖2 橋補電路
盡管力學模型元件可以做出許多樣式,但目前還是以通過測彎、剪、軸向以及它們的組合為主要的途徑來完成彈性元件的設計,并且本著使電橋輸出最大為目標來合理粘貼應變計的。討論電橋輸出電壓與橋路阻抗內在關系非常有必要,對了解橋補電路的實質內容很有幫助。
2.1 電橋四臂應變相等時的輸出
電橋四臂應變相等時,此時電橋習慣地稱為等臂全橋,常用的雙孔彎曲梁傳感器(S型傳感器)便是應用的實例。設有一組已按圖2所示接好的傳感器,同時做出該電路的等效電路,見圖3所示。從a,b點看,把該電路可以分成應變電路與補償電路兩部分,當電路工作時,從平衡角度理解可以產生如下等式。
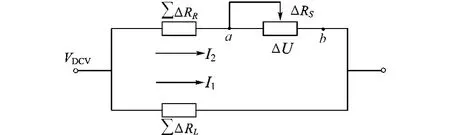
圖3 橋補等效電路
應變電壓:
只有當ΔUab=ΔU時可得出平衡方程,應變電壓平衡方程:

由于電橋存在著原始不平衡,使得電流表現出如下關系:

又因是等臂全橋,則有下述條件成立:
做一些代換可得以下方程。
應變電阻平衡方程:

在傳感器僅重力作用時∑RR,∑RL值是不變的(應變電阻代數和為零),所以可得表達式:

式中:常數因子
通過上述平衡方程式(1),(2)及[結論1]表達式演變可以看出,當有常數因子K存在時所做的測力或稱重的測量過程,在橋補電路里可表現為可以用ΔRS電阻的形式來補償∑ΔR的應變電阻量使得電橋恢復平衡的過程。在這種情況下,就可以把電橋的補償不再看成是電壓補償而變為電阻補償,通過電阻補償使電橋恢復平衡。通俗地講就是,因電橋阻值發生了∑ΔR量的變化使VA離開原平衡點,通過調節△RS而產生∑ΔRS的效應使VB重新與VA平衡。這樣,補償回路自然便成為電橋的一部分,這就是橋補電路不同于電橋之處,也是橋補結合電路的基本特點。
2.2 左、右半橋應變不相等時電橋的輸出
這種情況,常用的柱環式傳感器便是例子。這時,下述條件成立:
這類電橋稱為第一對稱全橋[3]。
此類型橋路的應變電阻平衡方程:

因為當有重力存在時∑RR,∑RL值不變,所以有恒等式:
但是,∑ΔRL,∑ΔRR的改變是呈線性狀態變化的,因而可以令:
式中:常數因子K=C+P.
比較兩個結論表達式完全相同。此時同樣可得出上述理論結果,它仍然是電阻的平衡過程。
3 同半橋中兩臂應變不相等時電橋的輸出
圓柱型、圓筒型傳感器就是屬于此類情況的典型例子。這類傳感器的應變計粘貼有豎向及橫向之別而組合成非對稱電橋。應用材料力學知識可知,在同一力的作用下豎向的應變量值將大于橫向值,也就是泊桑效應。對于制做傳感器的鋼質材料來說其相應的泊桑系數μ=0.24~0.30范圍,在這一前提下,完全可以做到以下條件成立:
第一,橋臂應變值 ∑ΔR1,∑ΔR2,∑ΔR3,∑ΔR4都是線性變化的。
第二,同時保證實現相關關系成立,即

但是,正因為泊桑現象的存在,使得在傳感器受力后產生了臂阻抗變化不平衡現象。圖4是以D點為參考點比較受力前后A,B兩點阻抗變化矢量圖,從圖中看到,受力前A,B兩點同時處于某一定義平衡狀態,但在受力后則分別從原來的A,B點移至A′,B′兩點,產生了一些不平衡現象:

且存在著∑ΔR4=μ|∑ΔR3|的關系,這樣最終導致|B-B′|>|A-A′|的結果。
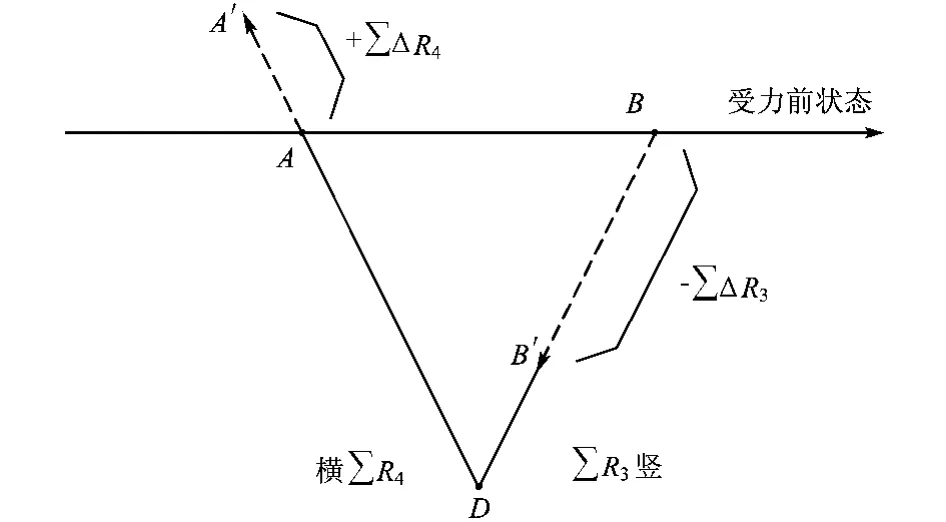
圖4 臂阻抗矢量變化
在上述2.1與2.2小節中談到僅當重力存在時∑RR,∑RL值不變,存在著一個比值常數。但在該例子中∑ΔRL,∑ΔRR值因受到∑ΔR4=μ∑ΔR1,∑ΔR2=μ∑ΔR3關系的影響而不在保持恒定,這樣是否導致∑RR/∑RL比值也會受到同樣的影響而不表現不變性。
設,在傳感器受力前比值為:
在傳感器受力后左、右半橋阻抗為:
其比值為:
這樣可以認為 ∑RR/∑RL比值受重力的影響可忽略不計。
該類型橋路的應變電阻平衡方程:

因對某一個傳感器來說μ值是恒定的,這樣可得表達式:

式中:常數因子同樣可得出上述的理論結果,稱重和測力過程仍然是電阻的線性補償和橋路電阻的線性平衡過程。
4 結論
電阻應變式測試技術中等臂全橋、對稱全橋以及非對稱全橋是常用的電橋電路,針對這三種電路使用的廣泛性及覆蓋性的特點,分別逐一地論證實現橋補結合電路的可能性(上述三個結論的導出充分表明了可能性)。這樣就可以實現在電阻應變式測試系統中,僅對電源提出能保證測量的靈敏度就行了的唯一要求。這也是橋補結合電路的特點之一。
橋補結合電路技術的的成功實現后,完全可以克服傳統的惠斯頓電橋所表現出難以彌補的一些不足之處,并對測試技術帶來了某些改進。
[1] 秦曾煌.電工學[M].北京:高等教育出版社,1999.
[2] 康華光.電子技術基礎[M].北京:人民教育出版社,1982.
[3] 王化祥,張淑英.傳感器原理及應用[M].天津:天津大學出版社,1990.
[4] 袁希光.傳感器技術手冊[M].北京:國防工業出版社,1986.
[5] 機械工業部儀器儀表工業局.非電量電測變換技術[M].北京:機械工業出版社,1988.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00