永磁同步直線電動機徑向基神經(jīng)網(wǎng)絡(luò)PID控制
2012-06-19 09:10:32韓明文
微特電機 2012年6期
韓明文,劉 軍
(1.上海電機學(xué)院,上海200237;2.華東理工大學(xué),上海200240)
0 引 言
直線電動機從結(jié)構(gòu)上看是把旋轉(zhuǎn)電機沿徑向剖開拉直而形成的。其工作原理與普通旋轉(zhuǎn)電機類似,都可以認為是由繞組電流產(chǎn)生氣隙磁場進而與勵磁磁場相互作用產(chǎn)生電磁推力。直線電動機相比于旋轉(zhuǎn)電機省去了中間傳動裝置,具有結(jié)構(gòu)簡單、噪聲低、速度快、精度高、組合靈活等優(yōu)點,從而逐漸廣泛應(yīng)用于現(xiàn)代工業(yè)中[1]。
然而正是由于其沒有中間傳動裝置,導(dǎo)致在結(jié)構(gòu)上少了緩沖環(huán)節(jié),使得參數(shù)攝動、負載變化等不確定因素的影響直接作用于電機,給系統(tǒng)控制帶來一定的難度。傳統(tǒng)PID控制具有結(jié)構(gòu)簡單、輸出穩(wěn)定、易實現(xiàn)等優(yōu)點而至今被沿用,但在以高速高精、負載擾動大的加工場合,簡單PID控制不能達到理想的控制效果[2-3]。針對以上現(xiàn)狀,本文提出了RBF神經(jīng)網(wǎng)絡(luò)PID的控制策略,基于神經(jīng)網(wǎng)絡(luò)具有很強的自學(xué)習能力,能對各種擾動和模型的參數(shù)攝動進行實時學(xué)習,將RBF神經(jīng)網(wǎng)絡(luò)與傳統(tǒng)PID相結(jié)合形成RBF神經(jīng)網(wǎng)絡(luò)整定PID控制,能在一定程度上改進傳統(tǒng)PID控制器的性能。
1 永磁同步直線電動機模型
直線電動機只是旋轉(zhuǎn)電機結(jié)構(gòu)上的一種演變,其原理基本類似,因此采取與旋轉(zhuǎn)電機相同的分析方法,由于直線電動機初級永磁體產(chǎn)生的磁動勢為定值及在次極上無阻尼繞組,可以建立直線電動機的數(shù)學(xué)模型。僅考慮電流基波分量,做以下假設(shè)[4]:
(1)忽略鐵心飽和;
(2)不計渦流和磁滯損耗;
(3)初級上沒有阻尼繞組,永磁體也沒有阻尼繞組;
(4)反電動勢是正弦的;
由此可以得出直線電動機在d-q軸下的數(shù)學(xué)模型:


式中:ud、uq為直線電動機直軸和交軸電壓;id、iq為直軸、交軸電流;R為電樞繞組的電阻;Ld、Lq為直軸、交軸電感;ψf為直線電動機永磁體磁鏈;V為直線電動機的速度;τ為極距。
直線電動機的推力:

在本文中,Ld=Lq=L,且在實際控制策略中,一般使id=0,因此推力方程可以簡化:

永磁同步直線電動機的動力學(xué)方程:

式中:Fd為直線電動機的負載阻力;Bv為粘滯摩擦系數(shù);m為直線電動機的質(zhì)量。
由此可以得出直線電動機的簡化結(jié)構(gòu)框圖如圖1所示。

圖1 PMLSM結(jié)構(gòu)框圖
2 RBF神經(jīng)網(wǎng)絡(luò)PID控制方法
經(jīng)典的PID控制算法:

在經(jīng)典的PID控制中,由于Kp、Ki、Kd三個參數(shù)的數(shù)值固定,即使初始數(shù)值設(shè)定合理,但對于一些復(fù)雜的控制對象,仍不能達到理想的控制效果[5-7]。而永磁同步直線電動機恰是具有很強的非線性和耦合性,并且在運行過程中存在負載變化和外部干擾等不確定因素,如果單純只采用PID控制將不能很好地控制它的運行。本文采取RBF神經(jīng)網(wǎng)絡(luò)與PID相結(jié)合的控制方法。RBF神經(jīng)網(wǎng)絡(luò)逼近能力強,具有較快的學(xué)習速度且不會陷入局部最小[8-9];而常規(guī)PID控制易于實現(xiàn),輸出穩(wěn)定且算法簡單,將兩者結(jié)合起來將使控制系統(tǒng)響應(yīng)更快,自適應(yīng)性和魯棒性更強。基于RBF神經(jīng)網(wǎng)絡(luò)的PID控制結(jié)構(gòu)如圖2所示。
RBF主要是作為辨識器跟蹤被控對象變化獲得PID參數(shù)在線調(diào)整所需要的 Jacobian陣信息[10],從而PID控制器利用獲得的信息實時地調(diào)整控制參數(shù),實現(xiàn)PID參數(shù)的自整定,達到良好的控制效果。
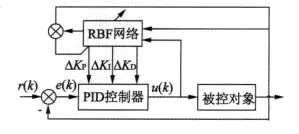
圖2 RBF神經(jīng)網(wǎng)絡(luò)PID控制
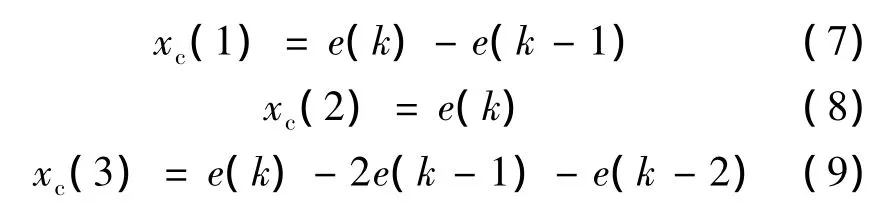
PID的輸入:采用增量式PID,神經(jīng)網(wǎng)絡(luò)整定性能指標函數(shù)為,由梯度下降法得到 Kp、Ki、Kd的調(diào)整公式[11]:
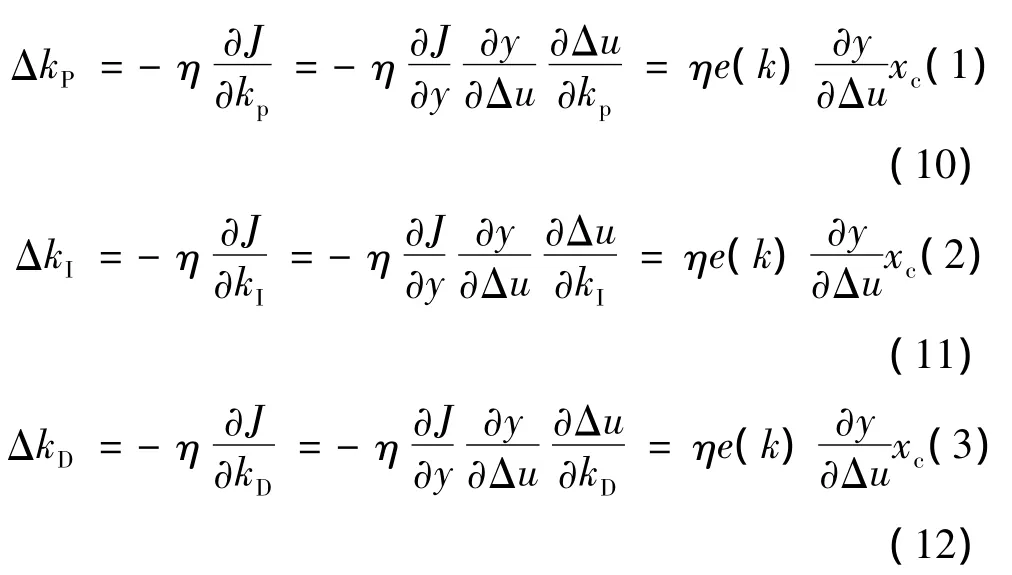
η為學(xué)習速率。Jacobian陣算法:

在本文中,速度環(huán)采用傳統(tǒng)PID與神經(jīng)網(wǎng)絡(luò)改進型PID相并聯(lián)的控制方式,并采用開關(guān)來根據(jù)實際情況采取相關(guān)控制類型,即當20%時,采用 RBF神經(jīng)網(wǎng)絡(luò) PID控制;當 e(t)=時,采用常規(guī)PID控制。直線電動機整體控制框圖如圖3所示。
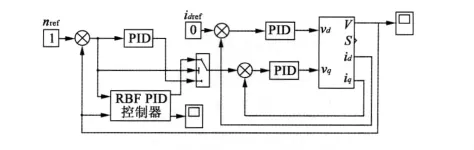
圖3 永磁同步直線電動機的RBF神經(jīng)網(wǎng)絡(luò)PID控制
由于RBF神經(jīng)網(wǎng)絡(luò)PID不能直接用傳遞函數(shù)來描述,簡單的Simulink無法對其進行仿真,在這里采用M文件下編寫的S函數(shù)來代替。
3 系統(tǒng)仿真
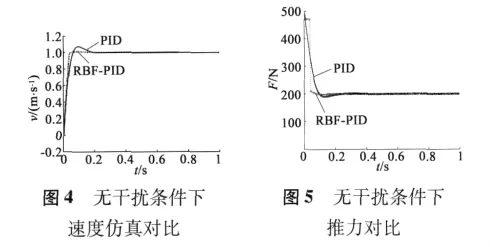
在仿真過程中,永磁同步直線電動機的仿真參數(shù)設(shè)置為 Rs=2.65 Ω,Ld=Lq=26.7 mH,Ψf=0.3 Wb,τ=16 mm,m=28 kg,Bv=4 N·s/m,F(xiàn)d=200 N。仿真速度給定為1 m/s,在無干擾條件下,傳統(tǒng)PID控制和RBF改進PID控制的速度和推力仿真結(jié)果如圖4和圖5所示。從速度波形可以看出,RBF神經(jīng)網(wǎng)絡(luò)PID控制不僅超調(diào)量更小,而且具有更快的響應(yīng)速度。從圖5可以得出,改進型PID控制可以使推力變化更加迅速與穩(wěn)定。
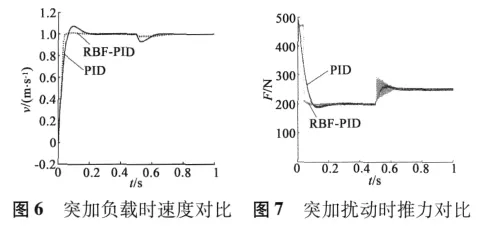
為了檢測系統(tǒng)的抗干擾能力,在t=0.5 s時突加50 N的負載擾動,然后再進行仿真,其速度和推力仿真結(jié)果如圖6和圖7所示。從速度波形可以看出,改進型PID控制不僅超調(diào)量小,響應(yīng)速度快,而且在突加擾動時的波動會較小,具有較強的抗干擾能力。推力在突然變化時,由于神經(jīng)網(wǎng)絡(luò)有一個學(xué)習的過程,所以有一定的波動,但整體結(jié)果優(yōu)于傳統(tǒng)PID控制。
4 結(jié) 語
本文針對直線電動機具有很強的非線性、參數(shù)攝動和負載擾動等特點,設(shè)計了RBF神經(jīng)網(wǎng)絡(luò)與傳統(tǒng)PID控制相結(jié)合的一種新的控制方法,并應(yīng)用于永磁同步直線電動機的速度環(huán)控制中。實驗結(jié)果表明,神經(jīng)網(wǎng)絡(luò)PID控制具有較強的魯棒性、響應(yīng)速度快且抗干擾能力強。所以本文設(shè)計的RBF神經(jīng)網(wǎng)絡(luò)PID控制可以獲得較好的靜態(tài)和動態(tài)性能。
[1]張幼平,張代林.基于DSP的直線電機位置伺服控制策略研究[J].電機與控報,2006,10(1):61 -65.
[2]Hua Sun,Dai Yuehong.Fuzzy PID control and simulation experiment on permanent magnet linear synchronous motors[J].2010 International Conference onelectrical and Control Engineering,2010,39(5):1047-1049.
[3]AL-Marhoon W K,AL-Sunni F M,Ahmed M S.An RBF-based non - linear PID controller[J].Systems Analysis Modelling Simulation,2002,42(7):1107 -1118.
[4]孫宜標,郭慶鼎.基于神經(jīng)網(wǎng)絡(luò)給定補償?shù)慕涣饔来胖本€伺服系統(tǒng)滑模控制[J].電工技術(shù)學(xué)報,2002,17(3):21 -25.
[5]Ramon Vilanova,Carles Pedret.Optimality characteristic of PI/PID controllers:A combined min - max/ise interpretation[J].Chemical Engineering Communicatios,2010,197(9):1240 -1260.
[6]Lu Hungching,Tseng Tzuyu.Design and implementation of the CMAC-Based controller for permanent magnet synchronous motor[J].Electric Power Component and Systems,2005,33(9):1015-1037.
[7]Wang Mingshyan,Kung Yingshieh,Hanh Nguyen Thi,et al.Adaptive low-speed control of permanent magnet synchronous motors[J].Electric Power ComponentsandSystems,2011,39(6):563 -575.
[8]Fan Xu,Meng Fanlin,et al.Research of brushless DC motor simulation system based on RBF - PID algorithm[J].Second International Symposium on Knowledge Acquisition and Modeling,2009,2:277-280.
[9]Liu Kun,Wang Mulan,Zuo Jianmin.An optimal PID controller for linear servo - System using RBF neural networks[C]//International Conference on Computational,Intelligence and Software Engineering,2009:1 -4.
[10]黃春慶,彭俠夫,王軍平.具有不確定雅克比矩陣機器人的魯棒非線性PID控制器的抗飽和失效設(shè)計[J].自動化學(xué)報,2008,34(9):1113 -1120.
[11]張國忠.智能控制系統(tǒng)及應(yīng)用[M].北京:中國電力出版社,2007.