電磁式人工肌肉控制系統的研究與設計初探
2012-06-19 09:10:34彭宏業秦現生
微特電機 2012年6期
李 靖,彭宏業,秦現生
(1.西北工業大學,陜西西安710072;2.中航工業西安飛行自動控制研究所,陜西西安710065)
0 引 言
隨著科技的進步,足式機器人在軍事和民用等方面得到越來越廣泛的發展應用。但傳統的足式機器人關節普遍采用的“旋轉電機-傳動機構”的驅動方式,因受電機本身的力-加速度特性以及傳動機構的動力學特性的限制,很難滿足日益復雜的應用環境對高性能關節運動的要求[1]。
由于動物肌肉相對傳統的驅動器有很多無法比擬的優點[2-4]:能量利用率高達 50%以上,能量/自重比高,瞬間爆發力大,緩沖能力強,同時具有儲能的特點,因此模擬動物肌肉特性制作的人工肌肉驅動器已成為國內外仿生研究的一個熱點領域。日本自20世紀60年代起就開始研制類肌肉驅動器[2],美國海軍將其列為未來新型驅動器的發展方向[5]。國內眾多高校如上海交通大學、哈爾濱工業大學、中國科學技術大學、清華大學等都開展了對人工肌肉驅動器的設計和應用研究[6-9]。目前大部分人工肌肉驅動器僅在宏觀結構上仿生生物骨骼肌收縮特性,并未對骨骼肌內部微觀結構及運動機理進行仿生,同時也由于材料、工藝、結構以及控制等方面的限制,還沒有設計出性能達到動物肌肉的驅動器。本文在分析哺乳動物骨骼肌結構和神經控制機理的基礎上,對微觀仿生的人工肌肉驅動器控制系統進行了設計與研究。
1 骨骼肌的生物學基礎
動物的運動是通過骨骼肌收縮帶動骨骼運動來實現的,且骨骼肌通過和不同類型的骨骼結構結合,產生不同的運動方式。骨骼肌是由肌纖維構成,而肌纖維又是由很多根肌原纖維組成,肌原纖維由串聯的若干肌小節組成,因此骨骼肌在宏觀上可以看作由若干肌小節通過串并聯組成,肌小節是肌肉運動的最基本單元。1954年Huxley[10]提出了關于肌肉運動機理的肌絲滑行學說,解釋了骨骼肌的收縮原理:雖然肌肉在宏觀上可表現為肌肉的縮短,但在肌細胞內部并無肌絲或分子結構的縮短,僅是在每一個肌小節內部發生了粗細肌絲之間的滑行。當肌小節處于舒張狀態時,粗絲與細絲之間重疊減少,肌原纖維伸展;當肌小節處于收縮狀態時,粗絲與細絲之間重疊增加,則肌原纖維收縮。
骨骼肌的活動,都是在中樞神經系統控制下完成的。來自中樞神經系統內的運動神經元支配骨骼肌的運動神經。運動神經元通過神經-肌肉接頭,將神經電信號傳遞給肌原纖維,再經過興奮收縮耦聯,引起肌原纖維的收縮。具體過程為:肌原纖維通過感受自身長度和位移變化,將轉化后的神經信號經傳入神經纖維通過脊髓傳至人體的大腦;大腦對傳入信號做出解析,通過脊髓將控制神經信號傳至各運動神經元;各運動神經元根據信號指示,通過神經末梢對肌原纖維進行控制;肌小節在信號的控制作用下,產生牽張反射,實現伸縮運動,并將運動產生的結果反饋給神經中樞[11-13]。骨骼肌機構與神經系統控制肌肉示意圖如圖1所示。
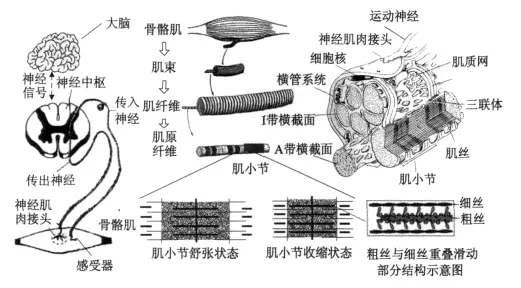
圖1 骨骼肌結構與神經系統控制肌肉示意圖
2 類肌小節的力和位移控制規律研究
上文介紹的骨骼肌在宏觀上可以看作由若干肌小節通過串并聯組成,參照骨骼肌的微觀結構機理,建立多個類肌小節驅動器串并聯結構矩陣的人工肌肉結構模式,如圖2所示。類肌小節利用線圈繞組磁場和永磁體磁場相互作用,通過控制線圈電流的大小和方向來控制永磁體的位置和輸出力,形成舒張和收縮狀態,詳細結構設計見文獻[14]。
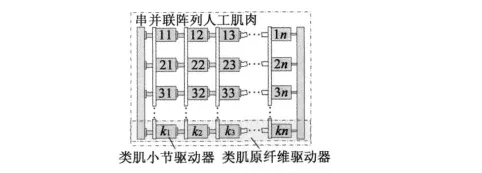
圖2 肌小節串聯組成的肌原纖維模式[14]
足式機器人在行進過程中會與環境接觸,在空間運動有約束,僅僅采用位置控制是不夠的,需要控制機器人位置的同時,還要考慮交互力的控制。主動柔順控制可以很好地解決這一問題,通過傳感器引入力、位置等信號,并進行數據處理,采用合適的控制策略控制機器人運動。
除了力與位置控制以外,還應考慮的因素包括重力、向心力、哥氏力、環境力以及加速度前反饋等因素,故類肌小節驅動器控制采取R-C力和位置混合控制,控制原理如圖3所示。位置/速度控制部分包括了3個通道:位置通道、速度通道和加速度通道。其中,xd為笛卡兒坐標系下末端期望位置;L為運動方程;q是關節位置矢量;J為雅可比矩陣;Kpp為位置通道比例系數;Kpi為位置通道積分系數;xd為末端期望速度;是關節速度矢量;Kpd為速度通道比例系數;Mp為位置、速度和加速度通道的選擇矩陣;d為末端期望加速度;M(q,)+g(q)為重力、向心力和哥氏力加入的關節動態補償
(q)為位置、速度和加速度通道的慣量矩陣;τ為空間力矩之和;Fd為笛卡兒坐標系下末端期望的廣義力;Mf為力控制部分各個分量的選擇矩陣;KfP為力通道比例系數;Kfi為力通道積分系數;F為當前末端的廣義力;KfdF為測量得到的廣義力;JTkfP為彈性目標對仿生關節的剛性要求而產生的環境力。

圖3 人工肌肉閉環控制原理
由位置通道、速度通道和加速度通道產生的關節空間力矩:
由力通道產生的關節空間力矩:
動態補償部分產生的關節空間力矩:

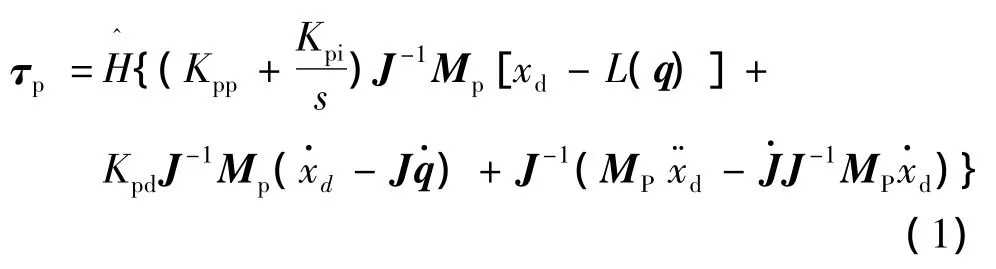
仿生關節空間的力矩為力通道產生的力矩、動態補償部分產生的力矩以及位置通道、速度通道和加速度通道產生的力矩三者之和。即:

3 人工肌肉驅動器控制系統硬件結構
通過類比生物神經控制組成方式,設計人工肌肉控制系統硬件組成框圖如圖4所示。中央計算機起人體大腦的作用,通過控制總線(脊髓)與類肌原纖維控制器DSP芯片通信。DSP向中央計算機提供通過傳感器(即人體感受器)采集的位置、力等信息,同時接受中央計算機下達的運動命令,并進行解算,最后對類肌小節驅動器進行控制。
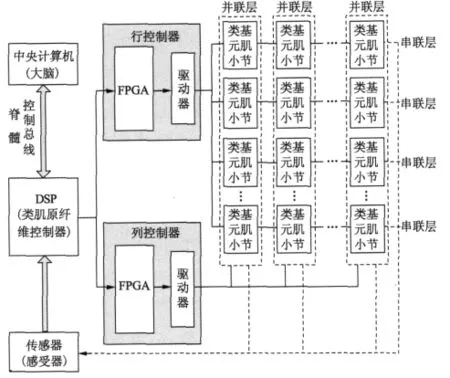
圖4 人工肌肉控制系統硬件組成簡圖
本系統具體實現電路如圖5所示。系統采用工控計算機構成上位機系統,采用DSP-FPGA的模式構下位機系統。上位/下位機通過RS-485總線進行通訊,系統通信的波特率設計為38 400 b/s,且可調;下位機的DSP與FPGA之間采用并行總線進行通訊,數據總線寬度為16位。
下位機系統中DSP處理器選用TI公司成熟的工業控制器TMS320F2812,設計工作外頻30 MHz,通過內部倍頻處理可工作在120MHz,該處理器在系統中實現的功能:運動控制指令的解碼、外回路控制律的解算,可變增益調節及故障監控等。
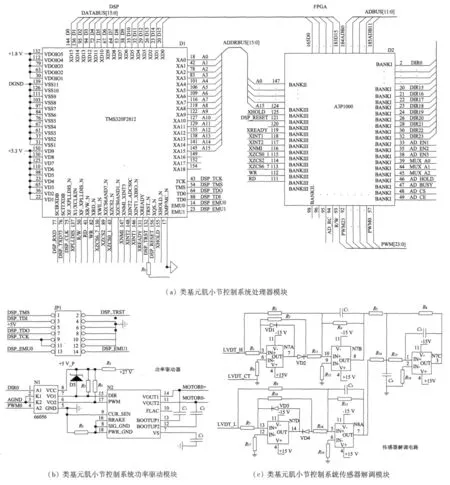
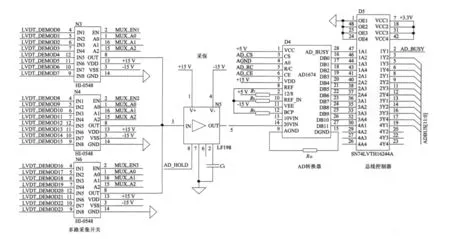
圖5 類基元肌小節控制系統硬件電路圖
FPGA選用APEX公司的A3P1000,該FPGA具備內部FLASH,真正實現“零”上電加載時間,有效避免因上電加載而出現系統失控現象,該FPGA在系統中實現如下功能:行/列驅動器電流開關通斷控制、驅動器工作的PWM波產生、驅動器正反轉控制信號的產生及A/D、D/A轉換芯片的控制等。
系統單個驅動器工作電流最大為1 A,因此可以用于驅動類基元肌小節驅動器的器件包括繼電器、晶閘管、功率管、專用功率驅動器等,實際選型考慮盡量減小控制器體積,因此選用集成度高、技術較成熟的專用功率驅動器,本系統選用NSC公司的專用驅動器LMD18200,該驅動器內部集成兩路驅動電路,工作電壓范圍較寬,具有過壓、過流、超溫保護。圖4中僅給出一路列肌小節驅動器控制電路,整個系統共設計了12組行/列肌小節驅動器控制電路。
4 人工肌肉驅動器控制系統軟件結構
通過類比生物神經控制方式,人工肌肉控制系統軟件任務分解如圖6所示。將控制系統分為上位機與下位機兩部分,起人體大腦作用的中央計算機,分析從DSP傳回來的傳感器實時數據,并對實時數據進行解析與信息融合,計算當前時刻人工關節所處的位置并分析關節受力等其它狀態。同時根據控制律要求,解算下一時刻人工關節運動的目標位置及運動任務,對人工關節進行任務協調和任務分解,計算出的控制量通過控制總線發送給下位機核心處理器DSP。DSP軟件所完成的任務:對上位機傳來的運動控制指令的進行解碼,并實時計算肌小節驅動器外回路控制律,對前向控制增益進行調節,此外DSP還負責各驅動器傳感器及電流回路的故障監控。DSP計算后的指令送至FPGA,由FPGA內部邏輯將這一指令轉化為驅動各肌小節驅動器運動的實際方向信號及電流PWM信號,使每個類基元肌小節達到預定位置,完成目標動作。
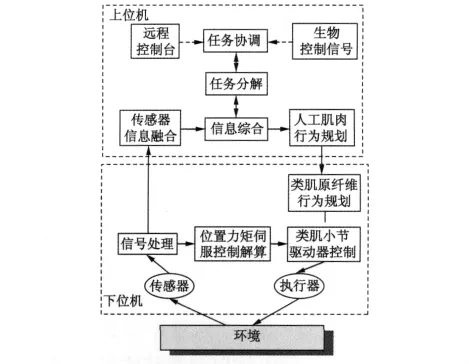
圖6 人工肌肉控制系統軟件任務分解圖
5 結 語
本文對哺乳動物骨骼肌結構和神經控制肌小節運動的機理進行了分析,為使仿生肌肉運動特性更加逼近動物肌肉,進一步研究了肌小節的力和位移控制規律。基于理論分析原理,經反復論證,設計出了仿動物肌肉結構的串/并聯肌小節驅動器控制系統,并對該系統的軟件進行了任務分解及上/下位機工作剖面劃分。本文旨在對仿生肌肉微觀控制系統設計方法進行探討,并完成了控制軟硬系統設計。后續將進一步進行實驗驗證,逐步完善該控制系統,使其達到實際工程運用的目標。
[1]應申舜,秦現生,任振國,等.基于人工肌肉的機器人驅動關節設計與研究[J].機器人,2008,30(2):142 -146.
[2]徐偉,孫序粱,何麗娟.仿生學在人工肌肉研究中的應用[J].機器人,1995,17(5):303 -308.
[3]陳守良.動物生理學[M].第二版.北京:北京大學出版社,2005.
[4]Bar- Cohen Yoseph,Biomimetics.Biologically Inspired Technologies[M].New York:Taylor& Francis Group,2006.
[5]Madden J D,Vandesteeg N,Madden P G,et al.Artificial muscle technology:physical principles and naval prospects[J].IEEE J.O-cean.,2004,29(3):706 -728.
[6]馬浩全,胡德金,張凱.Micro-displacement amplifying mechanism driven by piezoelectric actuator[J].Journal of Southeast University,2004,20(1):75 -79.
[7]宋艷,章永華,張世武,等.柔性仿生魚鰭中形狀記憶合金鰭條的優化設計[J].機械與電子,2009(5):5-9.
[8]王揚威,王振龍,李健,等.形狀記憶合金驅動仿生蝠鲼機器魚的設計[J].機器人,2010,32(2):256 -261.
[9]杭觀榮,曹國輝,王振龍,等.SMA驅動的仿生機器人研究現狀及其展望[J].微特電機,2006(11):4-8.
[10]Huxley A F.Muscle Structure and Theories of Contraction[J].Prog.Biophys.Biophys.Chem.,1957,7:255 -318.
[11]Koo T K K,Mak A F T.Feasibility of using EMG driven neuromusculoskeletal model for prediction of dynamic movement of the elbow[J].Journal of Electromyography and Kinesiology,2005,15(1):12-26.
[12]Loeb G E,Brown I E,Cheng E J.A hierarchical foundation for models of Sensorimotor control[J].Exp Brain Res,1999,126:1 -18.
[13]王煒.類肌肉仿生驅動技術研究[D].西安:西北工業大學,2010.