“自動控制原理”課程的頻域部分教學探討
2012-06-21 09:57:56丁世宏楊年法趙德安
電氣電子教學學報 2012年3期
丁世宏,楊年法,趙德安,馬 莉
(江蘇大學電氣信息工程學院,江蘇 鎮江 212013)
“自動控制原理”課程數學性強,理論概念抽象,具有一定的深度和學習難度[1,2]。盡管關于“自動控制原理”課程教學方面已經有很多相關的文獻論及,但大部分論文都是針對整個課程的教學探討[3,4],很少有專門針對某一章節而討論其具體存在的教學問題,以及相對應的解決策略。
在“自動控制原理”的教學中,頻域分析部分占有很大的比重,知識多,難度高。筆者針對“自動控制原理”頻域分析教學部分,總結出了目前關于這一部分教學中較為常見的幾個問題,并探討了一些相對應的解決策略。
1 頻域部分教學現狀
控制系統的頻域部分主要包括如下內容:①頻率特性的概念;②典型環節的頻率特性及頻率特性曲線的繪制(伯德圖和奈奎斯特曲線);③基于伯德圖和奈奎斯特曲線的穩定性判據;④利用頻域特性曲線分析系統的性能。
根據筆者調研,很多學生反映有些知識點在數學形式上比較復雜抽象,很難掌握。“自動控制原理”頻域部分可能引起學生理解困難的知識點,可以概括為以下四個方面。
1)對數頻率特性坐標系
傳統坐標系標度都是以十進制為單位,而這一部分所考慮的對數頻率特性坐標系標度以對數刻度來表示。十進制單位中的距離1,在對數頻率特性坐標系中以十倍頻程來表示。該知識點看似簡單,但是由于顛覆了傳統觀念中對距離的認識,因此在實際計算過程中很容易出錯。
2)幅角定理的理解
在講解奈奎斯特穩定判據的時候,首先要介紹幅角定理。由于幅角定理比較抽象,而奈奎斯特穩定判據正是建立在幅角定理的基礎之上,因而影響了學生對奈奎斯特穩定判據的理解和應用。
3)原點處有開環極點時的穩定判據
若系統的開環傳遞函數在原點處沒有極點,學生利用奈奎斯特穩定判據,一般都能夠準確的給出穩定與否的判別。但是,若系統的開環傳遞函數在原點處含有極點,從課后作業來看,錯誤率較高,特別是開環傳遞函數帶有兩個積分器的情形。
4)穩定裕度
學生對系統的穩定裕度具有思維定勢,仍然局限在時域內,即認定特征值離虛軸距離越遠,系統的穩定裕度越高。然而,若利用幅值裕度和相角裕度的概念來講解穩定裕度時,盡管有數學指標作為參考,但是對這兩個穩定裕度的理解仍然不夠深刻。
根據調查分析,產生上述問題的客觀原因主要有以下兩點:①系統的頻率響應主要分析輸入為正弦信號時,系統的輸出所具有的性質。因此,頻域響應的分析主要取決于系統的模型。由頻域部分的教學內容可知,研究對象是以傳遞函數為數學模型來描述的線性系統。教學方式主要是推導數學公式,得到數學上的結果。學生通常對繁瑣的數學公式推導難以理解,影響了課程的學習和知識點的理解;②課本中的例子很少涉及生活中的實際應用系統。使得學生誤認為頻域分析理論在實際過程之中沒有應用價值,對這一部分內容學習興趣下降。
2 頻域部分的教學探討
筆者針對上述教學中普遍存在的問題,建議采用如下有針對性的教學方法進行改進。
1)理論形象化,訓練反復化
由于基于數學模型和系統分析的理論內容占據課程內容的80%以上,首先要向學生強調理論內容的重要性。根據筆者的教學經驗,在每一節課前20分鐘的時間中學生的注意力最為集中。為了充分利用這段時間,應該將大部分較難理解的理論知識集中在這一時間段講解。在講解理論知識時,推導數學公式之余,應該要注重結合圖形表格來闡述,使得理論形象化。
在余下的時間,學生的注意力將有一定的分散。此時,不斷地采用例子對所講授的知識點進行反復訓練。甚至可以嘗試讓學生自己走上講臺練習。此外,還應當注重結合生活中的實際應用,利用前面的理論知識進行實例分析,從而提高學生的學習興趣,增強教學效果。
2)突出教學主線
教師在講解過程中,每一節課可能涉及到多個知識點。此時,學生的注意力可能會平均分散到多個知識點不易抓住重點。教師應該對這些知識點進行重組編排,保證在每一節課的講授過程中,始終以一個知識點為主線帶動其他知識點。這樣可以加深學生的記憶,有益于學生對知識點的理解。
3)將仿真和實際相結合
為了加強學生對知識點的理解能力,需要尋找一些易于建模的實際系統作為實例,并在這些實例上驗證所學的知識點。首先,對系統進行理論分析,并利用Matlab仿真軟件,給出實際系統的頻域分析結果。這一過程不僅可以加深學生對理論的理解,而且可以鍛煉學生的編程能力。其次,通過對該實際系統進行實驗研究,建立實驗平臺,驗證仿真分析的準確性,培養了學生的動手能力。此外,還可嘗試在科普期刊中尋找涉及到自動化控制方面的文章,向學生介紹文章中所應用到的“自動控制原理”中的理論知識。
3 教學實踐
現在,我們對頻域分析教學中存在的問題,歸納出相應的解決方法,大致分為以下三個步驟:①爭取在一堂課的前20分鐘以內講授完該節課有關知識點。在理論分析時,注意利用圖形或者表格,使得理論問題形象化和具體化;②構建基于實際模型的例子,利用所講授的知識點進行理論分析,并在Matlab上進行仿真驗證;③進行實驗教學,將理論知識實際化,使得學生懂得學以致用,最終理解所學習的知識點。下面以頻域分析中的“穩定裕度”為例,給出一個具體的教學案例。
1)闡述相角裕度和幅值裕度的基本概念
現定義截止頻率 ωc為|G(jωc)H(jωc)|=1,這里(0<ωc< +∞),則相角裕度為 γ∠G(jωc)H(jωc)-(-1800)。如果定義相位交界頻率ωg為∠G(jωg)H(jωg)=-π,控制系統幅值裕度為開環幅頻特性|G(jωg)H(jωg)|的倒數,kg=1/|G(jωg)H(jωg)|。對上述有關理論性知識的講解,主要通過奈奎斯特曲線(圖1)和伯德圖(圖2)來表述。
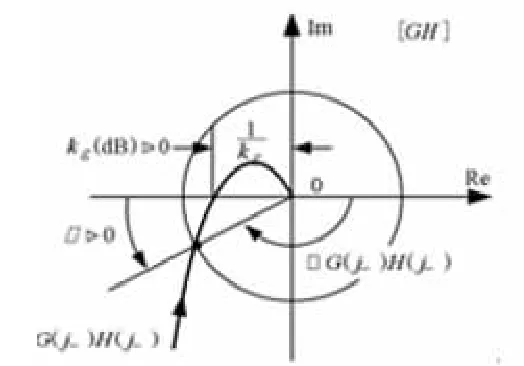
圖1 奈奎斯特圖
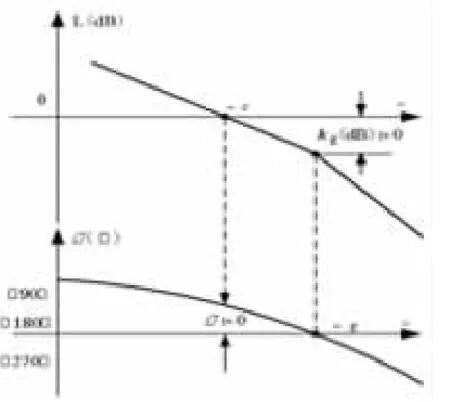
圖2 伯德圖
2)尋找一個滿足理論分析和實際實驗的例子
此處,我們給出如圖3所示的RLC電路系統的模型例子,給出其頻率特性的分析結果。
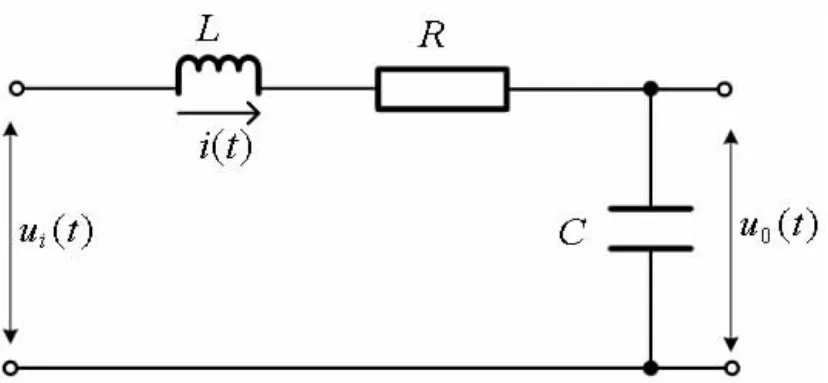
圖3 RLC串聯電路圖
在圖3中,輸入為ui(t),輸出為u0(t)。分析可得開環傳遞函數為G(s)H(s)=1/(LCs2+RCs+1),其頻域特性為

該系統是一個典型的二階系統,很容易利用勞斯判據判別系統穩定與否。為了驗證穩定裕度,首先利用勞斯判據,分別求出穩定裕度好、穩定裕度差、臨界穩定和不穩定幾種情況對應的參數L,C,R的具體值。然后驗證這些參數下的穩定裕度,并通過Matlab仿真,作出對比。
3)通過搭建電路來驗證上述的理論分析。
4 結語
筆者根據以往的教學經驗以及“自動控制原理”課程的特點,總結了該課程頻域部分教學中普遍存在的問題,并討論了這些問題存在的原因。與此同時,筆者還有針對性地介紹了一些解決這些問題的方法。我們通過一個教學案例,闡述了如何運用所介紹的教學方法解決已有的教學問題。
[1]胡壽松.自動控制原理(第5版)[M].北京:科學出版社,2007
[2]高國燊,余文烋.自動控制原理(第2版)[M].廣州:華南理工大學出版社,2005
[3]孟令雅.自動控制理論教學漫談[J].南京:電氣電子教學學報,2006,28(1),48-50
[4]陳旭,林國余.“自動控制原理”課程教學研究與探索[J].南京:電氣電子教學學報,2009,31(5):26-27
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
甘肅教育(2020年14期)2020-09-11 07:57:50
電子制作(2018年18期)2018-11-14 01:48:24
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
山東工業技術(2016年15期)2016-12-01 05:31:22