基于Atmega16的太陽能智能小車
2012-07-04 12:22:58林少帥趙齊齊郭志波
科技視界 2012年4期
關鍵詞:單片機
林少帥 謝 勇 趙齊齊 郭志波
(揚州大學信息工程學院 江蘇 揚州 225127)
0 引言
地球資源的日益貧乏,基礎能源的投資成本日益攀高,太陽能作為一種“取之不盡、用之不竭”的綠色新能源越來越受到重視。太陽能智能電動小車是一種環保型代步工具,它利用光伏效應,通過太陽能電池把太陽光轉化為電能,存儲在高能蓄電池中,并利用該電能驅動行駛車輛。本文基于AVR智能控制芯片對小車進行充放電的智能檢測控制,并對小車的行駛做出智能控制。
1 太陽能小車總體系統結構

圖1 系統框圖
太陽能智能小車系統框圖如圖1所示,由太陽能電池板、蓄電池、充電電路、驅動和電機構成的動力系統組成,而由單片機、紅外傳感器及遙控器構成控制系統。
當光伏電池電壓值大于蓄電池電壓值時,控制器利用太陽能給蓄電池進行充電,同時給負載供電。在充電的同時,系統對太陽能陣列、蓄電池、負載進行監控和管理,對蓄電池采取了防過充保護措施。當光伏電池電壓值較低時,充電電路不工作,由蓄電池直接給負載供電。當蓄電池電壓值較低時,蓄電池本身帶有防過放的功能,能夠切斷負載電路,防止蓄電池過放。紅外遙控器發射遙控碼,通過紅外一體管接收遙控碼,經過程序識別,可以控制小車做前進、后退、左拐、右拐以及智能避障等動作。
2 系統硬件設計
2.1 小車底盤
小車在行駛的過程中,需要加載太陽能電池板,并且根據紅外避障傳感器避開障礙物,所以小車要有較強的電機扭矩,并且需要堅固的車身,要求車身材料易于鉆孔,方便安裝單片機最小系統、電動機驅動電路模塊以及紅外避障傳感器等單元模塊。根據這些要求,決定選用有機玻璃作車身,采用鋁合金電機固定座,后輪采用雙電機驅動模式,選擇金屬齒輪大扭矩減速電機作驅動電機,前輪采用萬向輪支撐,其中金屬齒輪大扭矩減速電機的扭力6kg*cm,額定轉速是150r/min,額定電壓是6V,額定電流為500mA。這樣小車的負重能力可以達到5kg,足以載動太陽能電池板等硬件模塊。
2.2 單片機最小系統
單片機最小系統采用AVR單片機中的Atmega16,其最小系統包括復位電路、ISP接口、JTAG接口、PA~PD四個端口全部引出,支持JTAG仿真。其中PA~PD四個端口全部引出,便于應用或連接外圍設備,在進行實驗時只需要使用排線和外圍設備連接即可。預留有ISP接口,可以使用相應的ISP下載線向Atmega16L芯片中寫入程序。
2.3 電機驅動模塊
電機驅動芯片采用L298N雙H橋直流電機驅動芯片,驅動電路如圖2所示。L298N是SGS公司的產品,內部包含4通道邏輯驅動電路,是一種兩相和四相電機的專用驅動器,即內涵兩個H橋的高電壓大電流雙全橋式驅動器,接收標準TTL邏輯電平信號,可驅動46V、2A以下的電機。
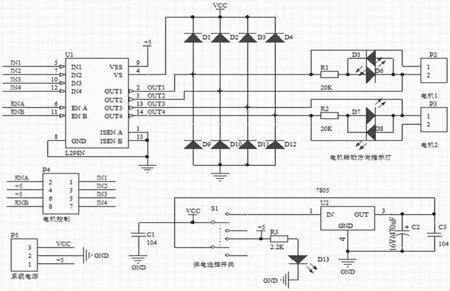
圖2 電機驅動電路圖
圖2中,OUT1、OUT2和OUT3、OUT4之間分別接兩個電動機。IN1、IN2、IN3、IN4引腳從單片機接輸入控制電平,控制電機的正反轉,ENA、ENB接控制使能端,控制電機的停轉。電機采用PWM調速的方法,其原理是開關管在一個周期內的導通時間為t,周期為T,則電機兩端的平均電壓U=Vcc*(t/T)=αVcc。其中α為占空比,Vcc是電源電壓。電機的轉速與電機兩端的電壓成比例關系,而電機兩端的電壓與控制波形的占空比成正比,因此電機的轉速與占空比成比例,占空比越大電機轉得越快。 另外采用7085穩壓芯片穩定輸出一個+5v的直流電壓,供單片機使用。
2.4 遠距離紅外避障模塊
為了使小車能夠實現自動避障功能,我們在小車的車前安裝了三個紅外避障傳感器,該傳感器的檢測距離為2-80cm,可以通過模塊上的電位器調節檢測距離。傳感器檢測到有障礙物時,輸出TTL低電平信號,無障礙物時輸出高電平信號。單片機可以根據輸出信號做出相應判斷。另外模塊上附有使能端,低電平有效,可以根據需要選擇要檢測的傳感器。
2.5 紅外遙控裝置
紅外遙控的遙控編碼是連續的32位二進制碼組,其中前16位為用戶識別碼,能區別不同的電器設備,防止不同幾種遙控碼互相干擾。后16位為8位操作碼及其反碼。這種遙控碼采用脈寬調制的串行碼,以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示二進制的“0”;以脈寬為0.565ms、周期為2.25ms的組合表示二進制的“1”。當發射器按鍵按下后,即有遙控碼發出,所按的鍵不同遙控碼也不同。遙控碼由一個起始碼(9ms),一個結果碼(4.5ms),低8位地址碼,高8位地址碼,8位數據碼和這8位數據碼的反碼組成。通過一體化紅外接收器接收遙控器發射出來的紅外脈沖波,然后由程序識別是否有按鍵按下以及按下的是那個鍵,然后根據程序對按鍵的定義,對不同按鍵做出相應的反應。
2.6 充電電路設計

圖3 充電電路模塊
由于太陽能電池板輸出電壓不穩定且輸出電壓比蓄電池高的多。故需降壓電路得到穩定且比蓄電池電壓稍高的電壓給蓄電池充電。充電主電路采用BUCK變換器,由UC3845、TL431構成閉環控制,同時使用光耦合隔離技術保證控制電路與功率電路安全隔離,最終達到輸出穩定的電壓。本設計裝置還具有過流、過壓保護功能,當過壓或過流時通過反饋使UC3845的6腳輸出波形的占空比減小,從而達到過流過壓保護作用。隨著充電的進行,蓄電池兩端電壓不斷升高,為防止電池過充,用單片機檢測蓄電池兩端電壓。當蓄電池兩端電壓過高時,port1輸出為高電平,由于光耦作用,IC3的第3端為高電平,可使D2的陰極電位大于1V,即UC3845的3腳大于1V,封鎖UC3845的6腳輸出,此時即停止對蓄電池的充電。

圖4 程序設計框圖
3 系統軟件設計
根據系統要求,程序設計框圖如圖4所示。
本系統采用Atmega16做控制芯片,其內部帶有模數轉換模塊,可以方便對充電電壓進行檢測,從而實現過充保護。另外兩個電機的轉速控制是通過PWM調壓實現的,而Atmega16的定時器有相位修正的PWM功能,可以在相應的定時中斷中修改占空比,從而控制電機轉速。實驗通過紅外遙控,進而對小車進行運動控制,其中有五個可調用函數,分別是前進函數、后退函數、左拐函數、右拐函數以及自動避障函數,紅外遙控實現對調用函數的選擇。在陽光充足情況下可實現不間斷行駛,電路工作穩定可靠,有很好的應用前景。
[1]王兆安,劉進軍.電力電子技術[M].5 版.機械工業出版社.
[2]路秋生.常用充電器電路與應用[M].機械工業出版社.
[3]海濤.Atmega系列單片機原理及應用[M].機械工業出版社.
[4]沈輝,曾祖勤.太陽能光伏發電技術[M].化學工業出版社.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
