GPS/GLONASS組合標準單點定位性能分析①
2012-07-18 03:50:10余文坤戴吾蛟蔡昌盛匡翠林
全球定位系統
2012年1期
余文坤,戴吾蛟,蔡昌盛,匡翠林
(1.中南大學測繪與國土信息工程系,湖南 長沙410083;2.湖南省精密工程測量與形變災害監測重點實驗室,湖南 長沙410083)
0 引 言
目前,世界范圍運行使用的全球衛星定位系統主要有美國的GPS和俄羅斯的GLONASS,截止到2011年7月24日,GPS實際可用衛星已達31顆,大大超過設計時的24顆,GLONASS工作衛星也已增至23顆[1],可見衛星成倍的增加和覆蓋范圍的擴大必然會帶來定位精度、效率與可靠性的提高,如在高緯度地區(55°以上),PDOP將比單系統降低30%,中緯度地區,也將降低15%左右[2]。另外,利用廣播星歷進行偽距定位仍廣泛應用于現實生活,GPS廣播星歷整體精度優于2m[3],GLONASS優于4.5m[4],隨著技術競爭尤其是導航系統現代化進程的推進,其系統可用性將趨于相當,因此,有必要研究如何充分利用GLONASS系統進行廣播星歷組合定位以提高單系統定位精度和可靠性。
1 系統差異
GPS與GLONASS系統差異主要表現在其時空基準和信號結構上(見表1)。
GPS和GLONASS分別采用 WGS-84和PZ-90坐標系,2007年9月20日,PZ-90坐標系更新至PZ-90.02,其與ITRF2000的差異降低到dm級,由于WGS-84與ITRF坐標系差異很小,實際偽距定位應用時可忽略不計,只簡單地考慮PZ-90.02到ITRF2000的平移變換(dx=0.36m,dy=-0.08m,dz=-0.18m)[5];利用廣播星歷計算衛星位置時,GPS使用開普勒軌道根數及相應攝動值外推求得任意時刻的衛星位置,GPS電文每2h播發一次[6];GLONASS則是根據30min間隔播發的地心坐標、速度及攝動加速度,利用龍格庫塔等數值積分算法積分獲得衛星位置信息[7]。
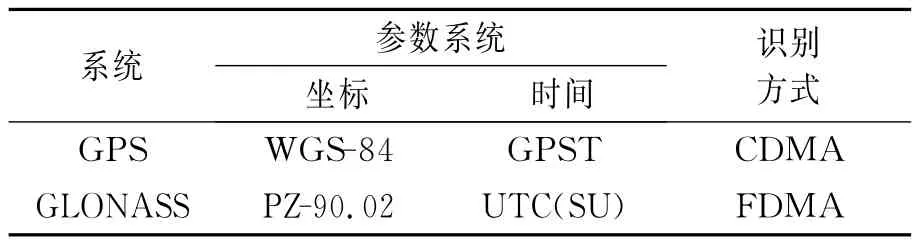
表1 GPS與GLONASS系統主要差異
GPS采用1980年1月6日0時起算的國際原子時(IAT),因此,與IAT 有19s的常數差[6];……
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
