采用霍爾傳感器的PMSM低成本控制系統(tǒng)
2012-07-20 03:59:50黃騰云姜淑忠李小海
微特電機 2012年1期
黃騰云,姜淑忠,李小海
(上海交通大學(xué),上海200030)
0 引 言
永磁同步電動機(以下簡稱PMSM)由于其具有功率密度大、效率高、轉(zhuǎn)子損耗小、噪聲低等優(yōu)點,廣泛應(yīng)用家電設(shè)備、機器人、電動車、電動醫(yī)療器械等領(lǐng)域。
PMSM為了產(chǎn)生平滑的轉(zhuǎn)矩以及減小電磁噪聲和轉(zhuǎn)矩脈動,因此需要高分辨率的轉(zhuǎn)子位置傳感器,例如:光電編碼器、旋轉(zhuǎn)變壓器等[1-2]。但是這類傳感器的使用不僅使得系統(tǒng)成本變高,并且易受高溫、高濕等惡劣環(huán)境的影響。為了使PMSM不用這類高分辨率的位置傳感器,目前產(chǎn)生了很多無傳感器的轉(zhuǎn)子位置觀測算法,但這些算法在起動和低速時容易出問題。霍爾傳感器具有價格便宜、運行可靠的優(yōu)點,近年來被廣泛應(yīng)用于正弦波驅(qū)動[3-4]。
針對系統(tǒng)對轉(zhuǎn)子位置分辨率要求不高但對成本有苛刻要求的場合,如家用洗衣機應(yīng)用場合,本文設(shè)計了一種采用霍爾傳感器作為轉(zhuǎn)子位置反饋的PMSM控制系統(tǒng)。該系統(tǒng)采用三個霍爾元件提供轉(zhuǎn)子位置信號,控制器利用轉(zhuǎn)子信號算出轉(zhuǎn)子位置和轉(zhuǎn)速計算輸出正弦波的位置角和幅值,進而計算出PWM波形的輸出脈寬,形成全數(shù)字的PMSM控制系統(tǒng)。
1 PMSM數(shù)學(xué)模型
圖1給出了一臺兩極PMSM的結(jié)構(gòu)示意圖。對于這種電機,可得出在靜止坐標(biāo)系下的電壓方程和磁鏈方程[5]:
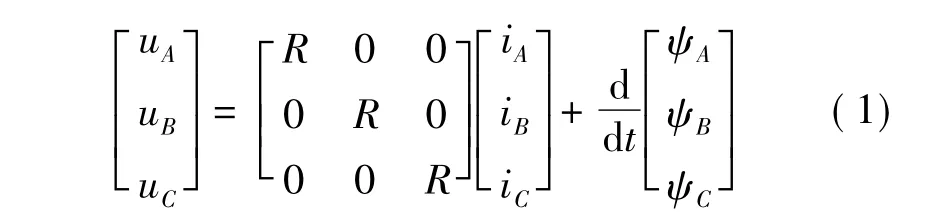
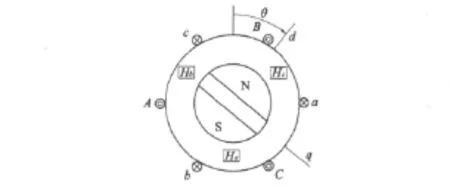
圖1 兩極PMSM結(jié)構(gòu)示意圖
式中:u、i、ψ分別為A、B、C三相繞組的相電壓、相電流和磁鏈;R為每相繞組的電阻。
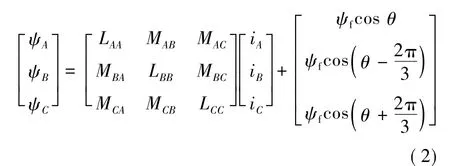
式中:Lii為每相繞組的自感;Mij為兩相繞組的互感;ψf為轉(zhuǎn)子永磁體的磁鏈;θ為轉(zhuǎn)子位置。PMSM的自感和互感可用下式表示:
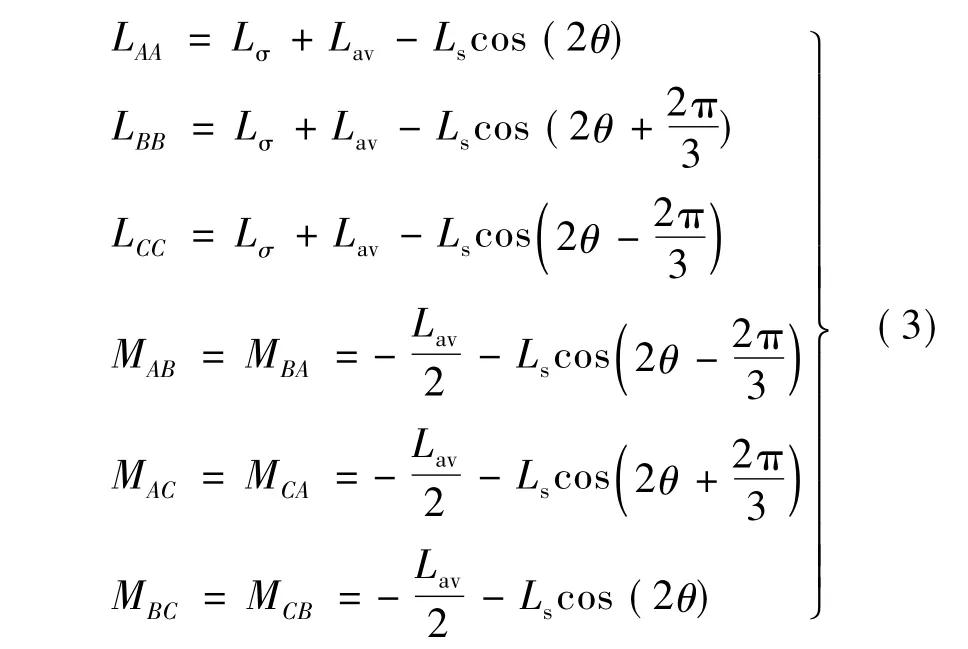
式中:Lσ、Lav、Ls分別為繞組自身的漏電感,主電感平均值和轉(zhuǎn)子相關(guān)電感量。
由以上各式可知,轉(zhuǎn)子位置θ與電機本身的參數(shù)(繞組電阻、電感和轉(zhuǎn)子永磁體的磁鏈)共同決定著電機的相電壓、相電流和磁鏈。PMSM的電磁轉(zhuǎn)矩可表示[6]:

其中:伴隨能WC= ∫ψAdiA+ ∫ψBdiB+ ∫ψCdiC,ω 為轉(zhuǎn)子電角速度,ei為各相的反電動勢:
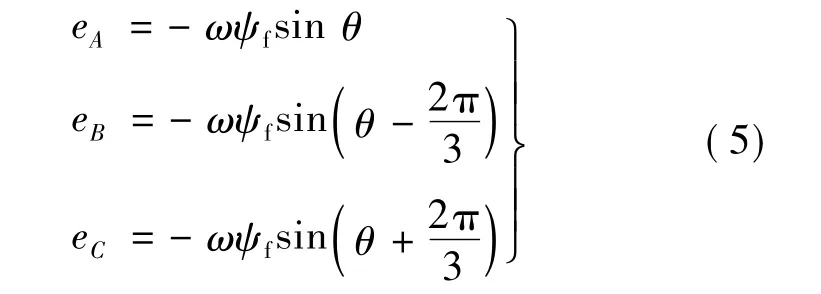
由式(4)和式(5)可知,如果反電動勢波形與相對應(yīng)的相電流波形不一致將會產(chǎn)生轉(zhuǎn)矩脈動以及電磁噪聲。因此,要將反電動勢為正弦波的PMSM的轉(zhuǎn)矩脈動降到最低,必須使PMSM的相電流為正弦波,即iA=Imsin θ,其中Im為電流幅值,則可得電磁轉(zhuǎn)矩表達式:

2 控制策略
相電流為正弦波時,由式(6)可知,PMSM的電磁轉(zhuǎn)矩為恒定值并且與轉(zhuǎn)子位置無關(guān)。定子繞組端電壓為反電勢、電樞繞組電阻壓降和電樞繞組電抗壓降矢量和,在家用洗衣機等對動態(tài)響應(yīng)要求不高的場合,可認(rèn)為加在定子端的相電壓近似等于反電動勢。因此可通過在PMSM輸入如式(7)的相電壓來產(chǎn)生與反電動勢相對應(yīng)的正弦波相電流:
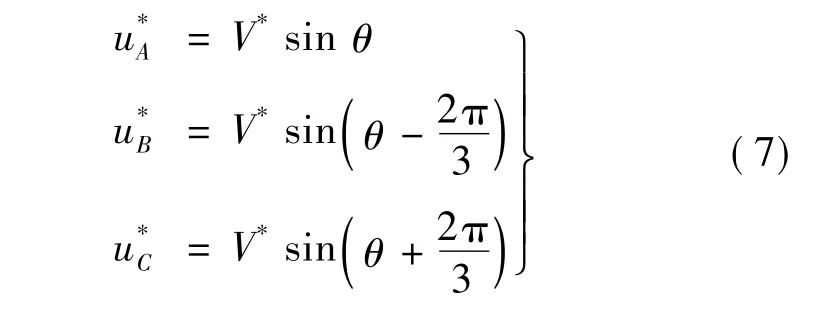
式中:V*為相電壓幅值。
圖2為PMSM的控制框圖。當(dāng)電機運行時,操作面板給定的轉(zhuǎn)速ω*減去通過霍爾傳感器估算得來的轉(zhuǎn)速ω,轉(zhuǎn)速誤差Δω通過轉(zhuǎn)速PI調(diào)節(jié)器得出正弦波的幅值V*。由式(7)可知,只要算出轉(zhuǎn)子位置θ就可以得到三相互差120°的正弦波相電壓,而轉(zhuǎn)子位置信息可通過對霍爾元件的輸出信號進行估算來得到。在完成上述任務(wù)后,通過規(guī)則采樣法或等面積法可算出6路PWM所輸出的脈沖寬度。
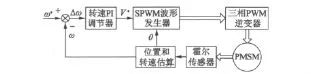
圖2 PMSM控制框圖
3 轉(zhuǎn)子位置與轉(zhuǎn)速的估算
由圖1所示,A、B和C三相對稱繞組互差120°電角度,三個霍爾元件也互差120°電角度,安裝在PMSM的定子上。當(dāng)霍爾元件在S極上時,它的輸出為高電平,否則,輸出為低電平。PMSM連續(xù)旋轉(zhuǎn)時,三個霍爾元件的輸出信號如表1所示。由表1可知,霍爾信號為三相相隔120°電角度的方波,且各有180°的有效角度,這些信號把360°電角度分為6個60°電角度的霍爾扇區(qū)。也就是說每一個電周期,三個霍爾元件的分辨率為6個脈沖,顯然直接用這6個狀態(tài)來產(chǎn)生正弦波是不夠的,因此需要來估算轉(zhuǎn)子的位置和轉(zhuǎn)速。
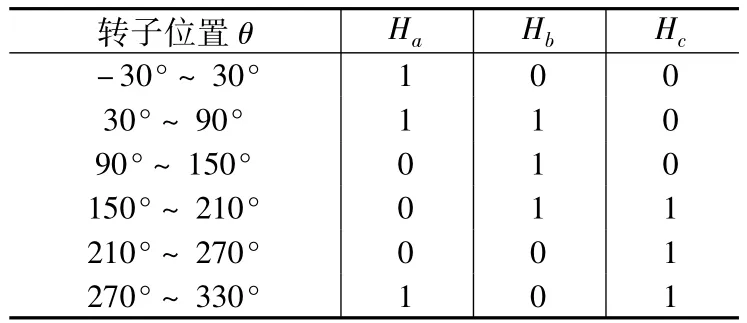
表1 霍爾元件輸出信號
假設(shè)兩個相連的霍爾狀態(tài)所間隔的時間為t,微處理器可通過定時器捕捉功能來記錄下這個值,在這個區(qū)間內(nèi),電機的平均角速度:

Capponi從泰勒展開式的角度闡述轉(zhuǎn)子位置和速度觀測算法,提出了零階算法和一階算法[7],即:
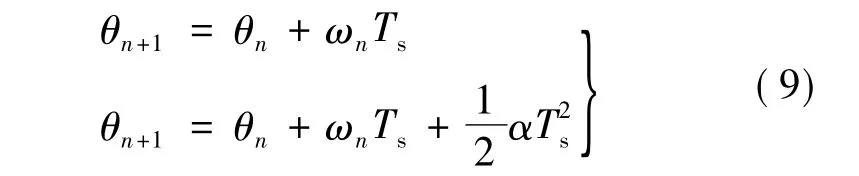
式中:θn為當(dāng)前計算得到的轉(zhuǎn)子位置角度;Ts為采樣時間即一個載波周期;α為平均加速度,即:

在通過以上算法得到PMSM的轉(zhuǎn)子位置信息后,微處理器還需要檢查估算得到的轉(zhuǎn)子位置是否在所期望的期間內(nèi)。例如,估算出來的轉(zhuǎn)子角度應(yīng)滿足30°≤θn+1≤90°,如果得到 θn+1<30°或 θn+1>90°,則將修正為 θn+1=30°或 θn+1=90°。并且微處理器在每進入一個新的霍爾扇區(qū)時進行一次轉(zhuǎn)子位置校正,以消除誤差的累積。
上述算法隨著階數(shù)的增加,轉(zhuǎn)子位置的誤差必然會降低,但是會給微處理器增加負擔(dān)。在家用洗衣機應(yīng)用場合,使用零階算法就可以滿足要求。因而可以采用8位單片機來完成對轉(zhuǎn)子位置的估算,以達到節(jié)省成本的目的。
4 實驗結(jié)果及結(jié)論
控制系統(tǒng)由整流電路、驅(qū)動電路、三相逆變電路、邏輯控制電路和PMSM構(gòu)成,如圖3所示。
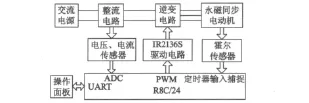
圖3 系統(tǒng)構(gòu)成框圖
所用的電機為一臺12極、功率為200 W的PMSM。本文根據(jù)上述的控制思路進行了大量的實驗,實驗證明系統(tǒng)可靠、有效。圖4為轉(zhuǎn)速為500 r/min時的兩相電流波形。圖5為運轉(zhuǎn)1.5 s后停止的一相電流波形,從波形可以看出,PMSM的起停是快速、安全和有效的。
本文采用三個霍爾傳感器作為反饋信號,通過8位單片機對霍爾信號進行轉(zhuǎn)子位置和轉(zhuǎn)速估算,與給定轉(zhuǎn)速進行比較,進而對PWM輸出脈寬進行調(diào)節(jié)實現(xiàn)電流的正弦換流。實驗結(jié)果表明,本文所構(gòu)建的控制系統(tǒng)不僅有很好的控制效果,而且又達到了節(jié)約成本的要求,具有廣闊的應(yīng)用前景。
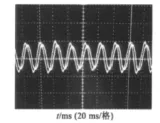
圖4 轉(zhuǎn)速為500 r/min的電流波形
圖5 運轉(zhuǎn)1.5 s后停止的電流波形
[1] Pillay P,Krishnan R.Application characteristics of permanent magnet synchronous and brushless DC motors for servo drives[J].IEEE Transactions on Industry Applications,1991,27(5):986 -996.
[2] Bu J,Xu L,Sebastizn T,et al.Near- Zero Speed Performance Enhancement of PM Synchronous Machines Assisted by Low Cost Hall Effect Sensors[C]//Proc of IEEE APEC& 98.1998:68 -74.
[3] Batzel T D,Lee K Y.Slotless permanent magnet synchronous motor operation without a high resolution rotor angle sensor[J].IEEE Trans.on Energy Conversion,2000,15(4):366 -371.
[4] Mori Moto S,Sanada M,Takeda Y.Sinusoidal current drive system of permanent synchronous motor with low resolution position sensor[C]//Proc.1996 IEEE IAS Annual Meeting.San Diego,CA,USA:[s.n.],1996:9 -14.
[5] 謝寶昌,任永德.電機的DSP控制技術(shù)[M].北京:北京航空航天大學(xué)出版社,2005.
[6] Todd D Batzel,Kwang Y Lee.Commutation torque ripple minimization for permanent magnet synchronous machines with Hall effect position feedback[J].IEEE Transactions on Energy Conversion,1998,13(3):257 -262.
[7] Capponi F G,De Donato G,Del Ferraro L.Brushless AC Drive Using An Axial Flux SynchronousMotor With Low Resolution Position Sensors[C]//Proc.of IEEE 35th Annual Power Electronics Specialists Conference.2004:2287 -2292.