高速永磁同步電動機無速度傳感器矢量控制
2012-07-20 03:59:56王繼強李國華佟寧澤
微特電機 2012年1期
王繼強,李國華,佟寧澤
(1.遼寧工程技術大學,遼寧葫蘆島125105;2.冶金自動化研究設計院伺服系統研究設計所,北京100071)
0 引 言
為了實現對轉矩的高品質控制,獲得優良的動態性能,永磁同步電動機(以下簡稱PMSM)一般需要安裝高精度、高分辨率機械式速度和位置傳感器[1-3]。高速永磁同步電動機轉子轉速高達30 000~100 000r/min。為了保證高速運行的安全,其轉子長度必須受到嚴格的控制。安裝機械式傳感器,必將增加轉子長度,從而影響高速永磁同步電動機轉子的動力學性能。同時,高速永磁同步電動機的定子電源頻率高達1 000 Hz左右,其高次電磁諧波和高頻振動對機械傳感器精度造成較大影響[4-5]。無速度傳感器不但能準確估計轉子速度和轉子位移,而且能避免機械式傳感器對高速電機轉子動力學性能的影響。因此無速度傳感器對高速和超高速電機而言具有重要的意義。
目前,無傳感器PMSM矢量控制中轉子位置和速度的估計方法有多種。文獻[1]采用一種基于MRAS的永磁同步電機速度辨識方案并對轉速和定子電阻進行辨識。文獻[6-10]分別采用擴展的卡爾曼濾波、神經網絡、滑模變結構等方法建立了永磁同步電動機無速度傳感器模型,但這些算法的設計比較復雜,實現起來對硬件的性能要求較高。文獻[11]提出了一種基于電磁轉矩反饋補償的新型PI速度控制器,提高了速度環的抗負載轉矩擾動能力。文獻[12-13]對高性能變頻調速控制系統中存在典型離散控制問題進行了深入的分析。文獻[14]分析了電機參數誤差對永磁同步電機性能的影響。文獻[15-20]分別利用模型參考自適應、小波變換和神經網絡、HHT、Park模型等方法計算了永磁電機的參數,但這些方法較復雜。文獻[21-22]利用場路耦合方法進行了異步電機和同步電機參數計算。
本文首先利用場路耦合方法計算了高速永磁同步電動機的交、直軸電感、轉子磁鏈等參數,并建立了一種以定子電流為狀態變量的高速永磁同步電動機無速度傳感器模型。該速度傳感器將參考模型q軸電流與可調模型q軸電流之差作為誤差信號送入PI調節器調節后得到估計轉速。該模型結構輸入變量少,結構相對簡單,可靠性高,特別對電動機的高速運行具有有效性和可行性。
1 隱極永磁同步的速度估計模型
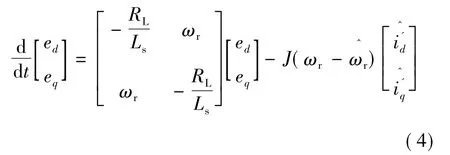
在同步dq坐標系中,隱極PMSM的電壓方程[2]:
令:
若以估計數表示:
即:



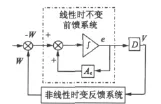
圖1 等效非線性反饋系統
式中:r0為一有限正數。
將V和W分別代入:

對Popov積分不等式進行逆向求解,就可得到轉速估計:

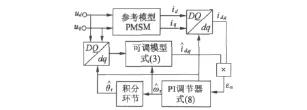
圖2 MARS估計轉子速度和位置
2 高速永磁同步電動機的參數計算
高速永磁同步電動機的額定轉速為60 000 r/min,為了防止永磁體在巨大的離心力作用下破壞,采用非導磁高強度合金鋼護套對永磁體進行保護[5],如圖3 所示。為準確計算該電機的交、直軸電感、永磁體磁鏈等參數,利用場路耦合方法建立了其有限元模型,并利用該模型計算了永磁體磁鏈。高速永磁同步電動機的轉子磁鏈可以由下式計算:

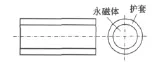
圖3 轉子結構示意圖
高速永磁同步電動機在60 000 r/min時的空載電壓E0如圖4所示。由式(9)可得其轉子磁鏈約為 0.074 Wb。
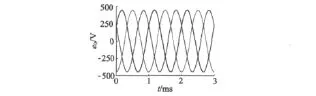
圖4 空載時電樞繞組上的反電動勢
對于直軸電感,先求出空載時的氣隙基波磁通Φ10,再求出直軸電流等于 Id時的氣隙基波磁通Φ1N,便可利用式(10)計算直軸電感[20]:

對于交軸電感Laq,直接在定子繞組中通入交軸電流Iq,求出此時產生的氣隙磁通Φaq,于是:

高速永磁同步電動機某時刻空載和負載氣隙磁密沿空間的分布如圖5所示。由圖5可知,負載時氣隙磁密存在較大的畸變,經傅里葉分析可以得到氣隙磁密的基波幅值為0.16 T,如圖6所示。應用式(10)可得其直軸電感為0.11 mH。由于該電機為隱極結構,交軸電感也為0.11 mH。

圖5 空載和去磁時的氣隙磁密分析

圖6 氣隙磁場的空間諧波分析
3 仿真結果及分析
本文利用MATLAB/Simulink仿真來檢驗高速永磁同步電動機無速度傳感器辨識算法的正確性。給定電機轉速為60 000r/min,給定轉矩為12 N·m,其額定功率為75 kW,其轉子轉動慣量為0.025 kg·m2。給定和實際的速度上升曲線如圖7所示,給定和實際的轉矩如圖8所示。電機在5.5 s后速度穩定在60 000r/min。電機速度上升到額定轉速之前,其輸出轉矩為最大輸出轉矩,約為30 N·m,約為額定轉矩的2.5倍。當轉速上升到額定轉速后,其給定轉矩為零。6 s時,給電機施加額定負載轉矩12 N·m。
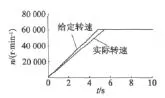
圖7 高速永磁同步電動機的給定和實際速度上升曲線
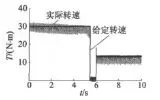
圖8 高速永磁同步電動機的給定和實際轉矩
高速電機的相電流如圖9所示,額定負載轉矩時電流幅值約為120 A,有效值約為85 A。相電流分解為直軸電流和交軸電流,如圖10和圖11所示。
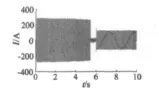
圖9 高速永磁同步電動機的相電流

圖10 高速永磁同步電動機的q軸電流
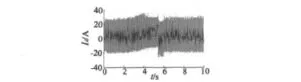
圖11 高速永磁同步電動機的d軸電流
高速永磁同步電動機的交軸電流與負載轉矩成正比,空載時約為零,額定負載時其平均為108 A。而直軸電流幅值在-40~40 A之間變化,平均值約為零,高速永磁同步電動機的電磁轉矩可由式(12)計算,其電磁轉矩為12 N·m。

4 結 語
高速永磁同步電動機的轉子結構和傳統的永磁電機轉子結構有所不同,為了準確計算該電機參數,建立了其場路耦合模型并計算了參數計算。在參數計算的基礎上,建立了以定子電流為參考變量的高速永磁同步電動機自適應速度估計模型,并進行了仿真分析,驗證了參數計算和速度估計模型的正確性。
[1] 齊放,鄧智泉,仇志堅,等.基于MRAS的永磁同步電機無速度傳感器[J].中國電機工程學報,2007,22(4):53 -58.
[2] 王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2009:179-207.
[3] Leidhold R,Mutschler P.Speed sensorless control of a long-stator linear synchronous motor arranged in multiple segments[J].IEEE Transactions on Industrial Electronics,2007,54(6):3246 -3254.
[4] 王繼強,王鳳翔,宗鳴.高速電機磁力軸承-轉子系統臨界轉速的計算[J].中國電機工程學報,2007,27(27):94 -98.
[5] 王繼強,王鳳翔,孔曉光.高速永磁發電機的設計與電磁性能分析[J].中國電機工程學報,2008,28(20):105 -110.
[6] 陸華才,徐月同.基于AEKF的永磁直線同步電機速度和位置估計算法[J].中國電機工程學報,2009,29(33):91-94.
[7] 劉侃,章兢.基于自適應線性元件神經網絡的表面式永磁同步電機參數在線辨識[J].中國電機工程學報,2010,30(30):68-73.
[8] 賈洪平,孫丹,賀益康.基于滑模變結構的永磁同步電機直接轉矩控制[J].中國電機工程學報,2006,26(20):134-138.
[9] Chu Jianbo,Hu Yuwen,Huang Wenxin,et al.Animproved sliding mode observer for position sensorless vector control drive of PMSM[C]//Power Electronics and Motion Control Conference.2009,6:1898-1902.
[10] 王慶龍,張崇巍,張興.基于變結構模型參考自適應系統的永磁同步電機轉速辨識[J].中國電機工程學報,2008,28(9):71-75.
[11] 郭新華,溫旭輝,趙峰,等.基于電磁轉矩反饋補償的永磁同步電機新型IP速度控制器[J].中國電機工程學報,2010,30(27):7-13.
[12] 張劍,溫旭輝,劉均,等.一種基于DSP的PMSM 轉子位置及速度估計新方法[J].中國電機工程學報,2006,26(12):145-148.
[13] 胡斯登,趙爭鳴,袁立強,等.高性能變頻調速系統的離散控制問題研究[J].中國電機工程學報,2010,30(30):1 -6.
[14] 陳陽生,黃碧霞,諸自強,等.電機參數誤差對永磁同步電機弱磁性能的影響[J].中國電機工程學報,2008,28(6):92-97.
[15] 徐占國,邵誠,馮冬菊.基于模型參考自適應的感應電機勵磁互感在線辨識新方法[J].中國電機工程學報,2010(3):71-76.
[16] 王亮,王公寶,馬偉明,等.基于小波變換和神經網絡的同步電機參數辨識新方法[J].中國電機工程學報,2007,27(3):1-6.
[17] 李天云,高磊,聶永輝,等.基于HHT的同步電機參數辨識[J].中國電機工程學報,2006,26(8):153-158.
[18] 孫黎霞,鞠平,高運華,等.基于Park模型的同步發電機參數辨識[J].中國電機工程學報,2009,29(19):50-56.
[19] 王飛.永磁同步電機無傳感器矢量控制方法研究及仿真[D].上海:上海交通大學,2008.
[20] 常凱.基于模型參考自適應的永磁同步電機無速度傳感控制系統的設計[D].沈陽:東北大學,2009.
[21] 陶果,邱阿瑞,柴建云,等.永磁同步伺服電動機的磁場分析與參數計算[J].清華大學學報(自然科學版),2004,44(10):1317-1320.
[22] 張飛,唐任遠,陳麗香,等.永磁同步電動機電抗參數研究[J].電工技術學報,2006,21(11):7-10.