基于多傳感器信息融合的滾動軸承故障診斷
2012-07-20 06:49:52艾莉華靜
軸承 2012年3期
艾莉,華靜
(紅河學院 工學院,云南 蒙自 661199)
旋轉機械中約30%的故障是由滾動軸承損壞而引起的[1],其運行狀態直接影響著主機的工作性能,因此研究滾動軸承的故障診斷技術具有重要的現實意義。近年來,軸承的故障診斷技術得到不斷發展和完善,診斷的有效性也在不斷提高。但是,在利用振動傳感器采集故障信號時,由于單個傳感器的可靠性及數據采集的隨機性等原因,所獲得的信息往往具有局限性,往往容易造成誤判。
多傳感器信息融合是近幾年發展起來的一門技術,其以多個傳感器在任意空間和時間上的互補與冗余信息為依據,經過多方面、多層次的相關、組合等分析處理,得出反映環境信息特征的一致性解釋和描述[2]。同時,鑒于粒子群算法在迭代尋找全局最優解方面的優勢以及BP神經網絡具有良好的非線性映射能力的特點,將基于證據理論的多傳感器信息融合技術和粒子群神經網絡結合起來。應用粒子群神經網絡對滾動軸承進行局部故障診斷,并計算各證據體的基本可信任分配函數,再由證據理論進行融合決策。該方法充分利用多個傳感器信息,降低了誤診和漏診的概率,有利于提高軸承故障診斷的精度和準確性。
1 軸承故障特征量的選取
在軸承故障診斷中,故障特征向量的合理選取是診斷的前提,直接影響著診斷結果的準確性。由于軸承的振動信號中包含著其運行的狀態信息,當軸承零件如內圈、外圈或滾動體出現局部故障時,將反映為振動信號頻率成分和能量的變化[3]。而通過加速度傳感器采集的振動信號的隨機性較強,且往往是一個寬帶信號。因而將這些振動信號的幅域參數統計計算,以提取能夠反映軸承運行狀態的特征向量。同時,由于振動信號幅域參數:絕對均值、方差、標準差、有效值和方根均值能夠體現出信號的變化,并且可以準確地反映某種故障的變化特征。因此,選擇這5種歸一化后無量綱的參數作為表征軸承運行狀態的特征參量,相應4種運行狀態為:正常(1 0 0 0)、外圈故障(0 1 0 0)、內圈故障(0 0 1 0)、滾動體故障(0 0 0 1),作為證據理論的故障識別框架。
2 多傳感器信息融合的故障診斷算法
下文采用2個振動傳感器進行信息融合,判定軸承的4種故障類型(正常、外圈故障、內圈故障和滾動體故障)。同時,基于提高故障診斷準確度的考慮,先將各個傳感器的檢測結果通過粒子群優化BP神經網絡算法[4]進行局部診斷,以計算各傳感器的基本可信任分配函數值,再由證據理論融合決策。
2.1 粒子群神經網絡
在d維搜索空間中,有m個粒子組成一個群體,對每個粒子i(i=1,2,…,m)包含一個速度向量Vi=(vi1,vi2,…,vid)和位置向量Xi=(xi1,xi2,…,xid)。該粒子經歷的最優位置記為pi=(pi1,pi2,…,pid),整個粒子群所經歷的最優位置記為
pg=(pg1,pg2,…,pgd)。在每次迭代中,粒子i通過跟蹤這2個最優值,按照下式來更新速度和位置。
vid(k+1)=wvid(k)+c1r1[pid(k)-
xid(k)]+c2r2[pgd(k)-xid(k)],
(1)
xid(k+1)=xid(k)+vid(k+1),
(2)
式中:w為慣性權因子,使粒子保持運動慣性;c1,c2為學習因子,一般c1=c2;k為迭代次數;r1,r2為兩隨機數,取值區間為[0,1]。粒子在調整自己的位置時,還受到最大速度vmax的限制。如果對粒子的加速導致其在某維的速度超過在該維的最大速度,則該維的速度就被限制在最大速度上。
為了平衡粒子群算法的全局和局部搜索能力,慣性因子常進行自適應調整。
(3)
式中:wmax,wmin分別表示w的最大值和最小值;k表示當前迭代步數;kmax表示最大迭代步數,通常取wmax=0.9,wmin=0.4。
盡管標準粒子群算法收斂速度快,具有很強的通用性,但其存在早熟收斂問題。借鑒遺傳算法的變異思想,在標準粒子群算法中引入變異操作,即對某些變量以一定的概率重新初始化。變異操作拓展了在迭代中不斷縮小的種群搜索空間,使粒子能夠跳出先前搜索到的最優值位置,在更大的空間中繼續搜索。這種方法既保持了種群的多樣性,又可提高搜索出最優值的可能性[5]。
粒子群神經網絡算法通過粒子群各粒子在其搜索空間內搜索BP網絡各層間的權值及閾值。首先,將BP網絡的權值、閾值賦予初始值。其次,根據所確定BP網絡的拓撲結構,計算出網絡的輸出值。再次,用粒子群算法搜索出最優位置,使得適應度函數達到最小。在這里,對2個傳感器所采集的數據,分別選用標準粒子群算法和帶變異操作的粒子群算法進行BP網絡權、閾值尋優。最后,采用BP網絡對所獲得的最優值進行二次學習訓練,得到最終的軸承局部故障診斷模型,并將輸出結果折算后進行融合決策。
2.2 證據理論
證據理論[6-7]是建立在一個非空集合Θ基礎上的理論。首先定義識別框架Θ,其由一些互斥且窮舉的基本命題組成。令2Θ是Θ的一個mass函數,在2Θ上,若函數m:2Θ→[0,1],且滿足

(4)
如果A為Θ的子集,且m(A)>0,則稱A為證據的焦元,所有焦元的集合稱為核,證據由證據體(m,m(A))組成。
設m1和m2分別是識別框架Θ上的mass函數,對?A?Θ,A≠φ,有如下合成規則
,(5)

3 仿真試驗
在仿真試驗中,對軸承進行局部故障診斷所采用的2個粒子群神經網絡的結構均為5-10-4,訓練誤差為0.000 1,置信門限設為0.8。粒子群優化算法的參數設置為:種群規模30,最大迭代次數50,學習因子c1=c2=1.494 45,慣性權重w隨迭代次數由0.9線性地減小為0.4。帶變異操作的粒子群算法的變異概率p=0.2,Matlab代碼為:
If rand>0.8
k=ceil(2*rand);
pop(j,k)=rand;
end
文獻[8]給出了軸承4種常見故障類型與振動信號幅域參數之間的關系數據,其中測試數據見表1。在Matlab中編程,可得出帶變異操作的粒子群神經網絡算法適應度函數變化曲線如圖1所示。
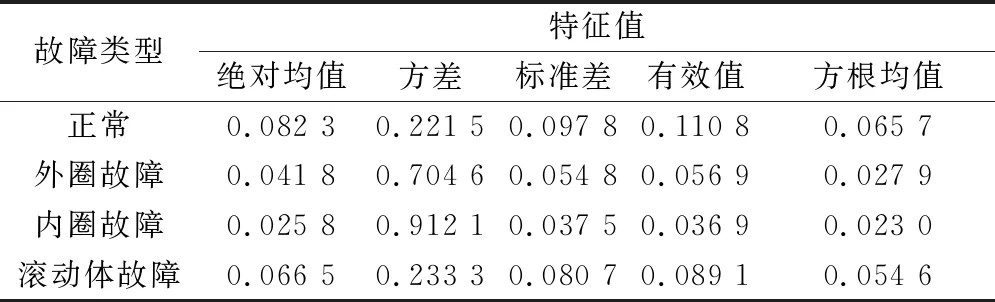
表1 測試數據
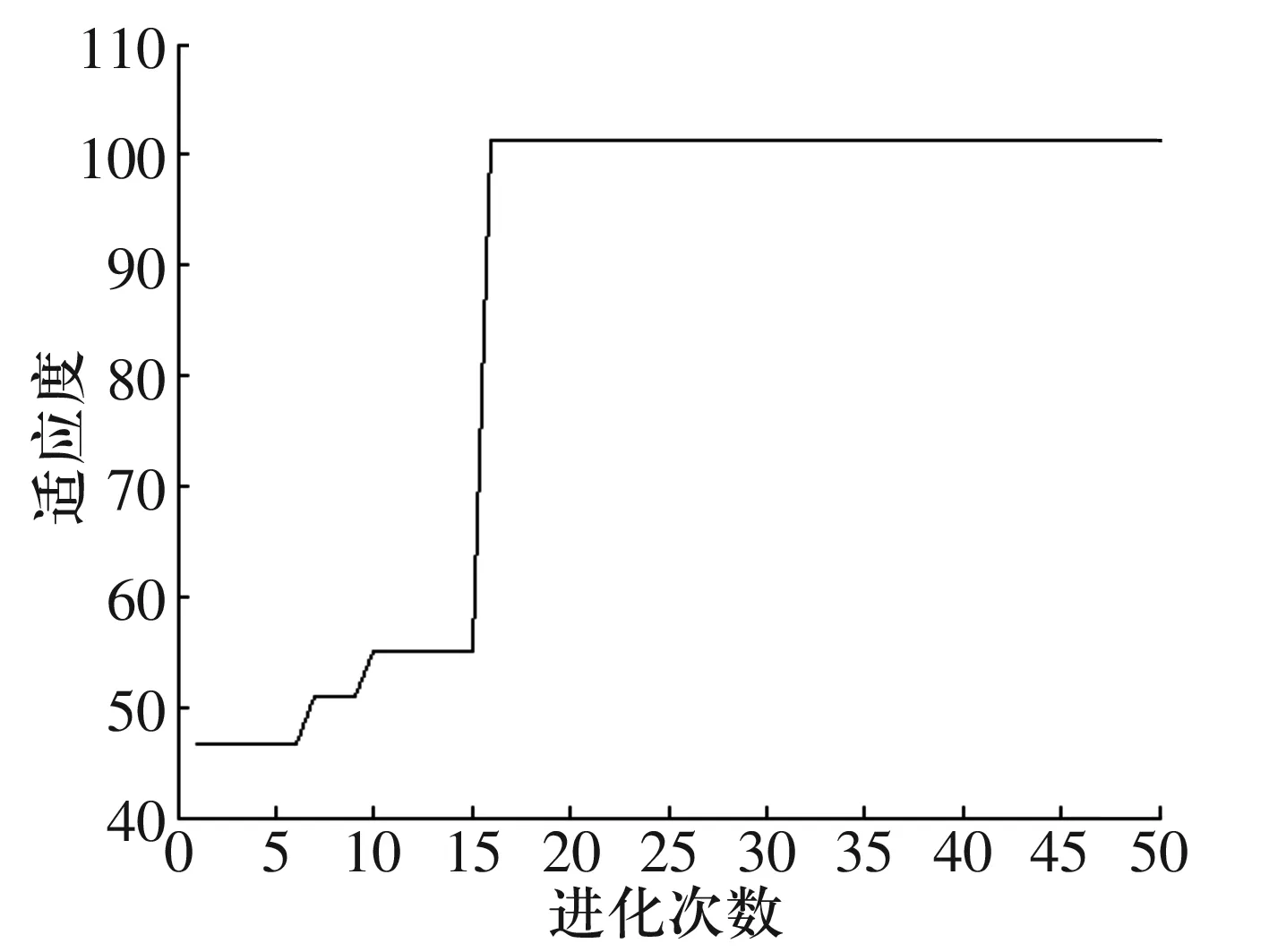
圖1 帶變異操作的粒子群神經網絡適應度函數變化曲線
由圖1可以看出,當帶變異操作的粒子群神經網絡迭代16次后,滿足了預設精度要求。并且較BP網絡而言,粒子群神經網絡輸出的誤差更小、收斂速度更快,這也是選其作為局部故障診斷模型的原因。
為了進一步說明該故障診斷方法的有效性,下面以軸承內圈故障為例進行證據融合。由表1中的測試數據,此時2個傳感器輸出結果構成的故障矩陣為:

將2個傳感器輸出結果進行歸一化處理,其單獨及融合(k=0.316 1)后的可信度分配見表2。其中,m(y1)表示對內圈故障的信任度,m(y2)表示對滾動體故障的信任度,m(p)表示故障類型的不確定度。
由表2可知,傳感器1的診斷結果為,內圈故障的置信度為0.628 1,滾動體故障的置信度為0.253 4;傳感器2診斷結果的置信度分別為0.725 2和0.210 7;以單個結果看,此時軸承發生內圈故障的可能性最大,但是否出現滾動體故障仍不能完全排除。說明僅僅利用1個傳感器信息進行故障診斷時,故障類型識別的不確定性較大。將2個傳感器信息融合后,軸承發生內圈故障的可信度值提高到0.850 6,大于置信門限0.8。同時,滾動體故障的可信度下降到0.138 3,而故障類型的不確定度值也大幅下降到0.011 1,表示對內圈故障的支持程度增大了。最終診斷出的故障類型只為內圈故障,與實際發生的故障類型相吻合。
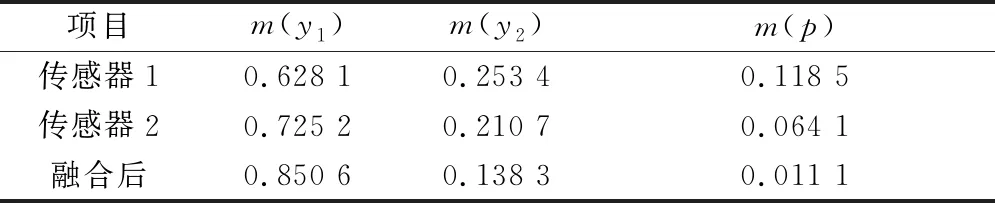
表2 傳感器的可信度分配
4 結束語
在局部故障診斷時,粒子群優化算法提高了BP神經網絡的收斂速度,改善了其泛化能力。并根據證據理論的證據合成規則,最終實現了對軸承故障診斷的最優決策。示例表明,該算法可使診斷結果的可靠性和準確性得到很大提高。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
