基于離散時間無差拍的無軸承異步電動機SVM-DTC系統(tǒng)
2012-07-20 06:49:18劉賢興陳虎周進偉楊澤斌
軸承 2012年3期
劉賢興,陳虎,周進偉,楊澤斌
(江蘇大學(xué) 電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
無軸承異步電動機由于弱磁容易、結(jié)構(gòu)簡單和可靠性高等特點得到普遍的重視。目前對無軸承異步電動機的控制方法主要有矢量控制[1-3]和直接轉(zhuǎn)矩控制[4]。采用直接轉(zhuǎn)矩方法控制無軸承異步電動機,可以使轉(zhuǎn)矩控制繞組不再受到矢量控制算法的制約,從而克服了矢量控制算法的局限性[4]。而且懸浮控制繞組所需要的轉(zhuǎn)矩繞組氣隙磁鏈可由直接轉(zhuǎn)矩控制算法中已辨識好的定子磁鏈減去定子漏磁得到,無需再設(shè)置磁鏈觀測器或采用探測線圈等方法來獲得磁鏈信息,從而降低了系統(tǒng)的成本。
與普通的異步電動機相比,無軸承異步電動機對轉(zhuǎn)矩的脈動更加敏感,而傳統(tǒng)的直接轉(zhuǎn)矩控制算法容易產(chǎn)生抖顫。為了減小轉(zhuǎn)矩脈動,文獻[5-6]針對異步電動機提出了SVM-DTC控制策略,但是該策略需求解復(fù)雜的正交方程。文獻[7]提出一種轉(zhuǎn)矩和磁鏈跟蹤與預(yù)測相結(jié)合的方法,該方法同時考慮了轉(zhuǎn)矩與磁鏈的無差拍控制,但存在計算量大等問題。
文中研究了基于離散時間無差拍(DTDB)的無軸承異步電動機SVM-DTC控制算法。
1 無軸承異步電動機的數(shù)學(xué)模型
無軸承異步電動機的定子中放入了兩套不同極對數(shù)的繞組,一套為轉(zhuǎn)矩控制繞組(極對數(shù)為np1,同步旋轉(zhuǎn)角速度為ω1);另一套為懸浮控制繞組(極對數(shù)為np2,同步旋轉(zhuǎn)角速度為ω2)。只有當(dāng)np1=np2±1,ω1=ω2時,才能產(chǎn)生可控懸浮力。無軸承異步電動機的數(shù)學(xué)模型主要包括旋轉(zhuǎn)部分和懸浮部分方程。下標(biāo)1,2分別表示旋轉(zhuǎn)部分和懸浮部分的參數(shù)。
1.1 旋轉(zhuǎn)部分
無軸承異步電動機旋轉(zhuǎn)部分在兩相同步旋轉(zhuǎn)坐標(biāo)系中的狀態(tài)方程為
(1)
(2)
(3)
(4)
(5)
式中:ωr為轉(zhuǎn)子角速度;Te為電動機的轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩;J為轉(zhuǎn)動慣量;ψ1sd,ψ1sq分別為定子d,q軸磁鏈;R1s,R1r分別為定、轉(zhuǎn)子電阻;i1sd,i1sq分別為定子d,q軸電流;u1sd,u1sq分別為定子d,q軸電壓;σ為電動機漏磁系數(shù);T1r為轉(zhuǎn)子電磁時間系數(shù);L1s,L1r分別為定、轉(zhuǎn)子電感。
電動機的轉(zhuǎn)矩方程為
Te=np1(ψ1sdi1sq-ψ1sqi1sd) 。
(6)
1.2 懸浮部分
懸浮力方程為
(7)
偏心磁拉力方程為
(8)

運動方程為
(9)
(10)
式中:Fzx,F(xiàn)zy分別為x,y方向施加的外部干擾力;x,y分別為x,y方向上的偏心位移。
2 離散時間無差拍控制電壓生成
在離散時間系統(tǒng)控制理論中,無差拍控制是找出合適的輸入信號,待其作用于系統(tǒng)后,在最少時間步長內(nèi)使輸出信號趨向于零。無差拍控制的最顯著優(yōu)點是數(shù)學(xué)推導(dǎo)嚴(yán)密、跟蹤無超調(diào)、系統(tǒng)動態(tài)響應(yīng)快、易于計算機執(zhí)行。無差拍直接轉(zhuǎn)矩控制方法的弊端是需要求解二次方程,不利于數(shù)字控制系統(tǒng)的實現(xiàn)。為了簡化此方法,達到分離轉(zhuǎn)矩、磁鏈控制電壓的目的,在定子磁場定向的同步坐標(biāo)系下,對電動機的模型進行分析,則有ψsq=0,ψsd=ψ1s。考慮到數(shù)字控制系統(tǒng)的采樣時間比較小,在采樣周期T內(nèi)實現(xiàn)轉(zhuǎn)矩與磁鏈的無差拍控制,需對(2)~(6)式進行離散化,得到
(11)
0=-R1si1sq(k)-ω1(k)ψ1sd(k)+u1sq(k) ,
(12)
(13)

(14)
Te(k)=np1ψ1sd(k)i1sq(k) 。
(15)

Δψs=ψ1sd(k+1)-ψ1sd(k)=
(16)
根據(jù)k時刻與k+1時刻的磁鏈誤差,得到磁鏈控制的電壓方程,即把(16)式代入(11)式可得
(17)
在直接轉(zhuǎn)矩算法中,控制系統(tǒng)直接對電動機的轉(zhuǎn)矩進行控制,對于穩(wěn)定的系統(tǒng),要求k+1時刻達到系統(tǒng)的負(fù)載轉(zhuǎn)矩。
ΔTe=Te(k+1)-Te(k)。
(18)
根據(jù)(15)式可得
(19)
根據(jù)轉(zhuǎn)矩誤差得到轉(zhuǎn)矩控制電壓。把(19)式代入(18)式可得
(20)
把(12)~(14)式代入(20)式,消去i1sq(k+1)可得
(21)
(17)式和(21)式中的電壓u1sd(k)和u1sq(k)即為k時刻實現(xiàn)SVM-DTC控制的定子電壓。
3 基于離散時間無差拍的無軸承異步電動機SVM-DTC控制系統(tǒng)
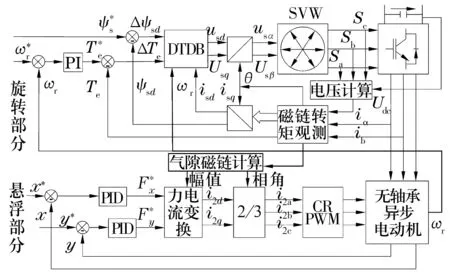
圖1 無軸承異步電動機控制系統(tǒng)框圖
4 仿真和試驗
利用Matlab中的Simulink工具箱,分別建立基于離散時間無差拍的SVM-DTC和傳統(tǒng)DTC控制系統(tǒng)。仿真系統(tǒng)中采用的無軸承異步電動機參數(shù)如下:轉(zhuǎn)矩繞組額定功率PN1=1 kW,額定轉(zhuǎn)速nN=6 000 r/min,定子電阻R1s=2.01 Ω,轉(zhuǎn)子電阻R1r=11.48 Ω,定、轉(zhuǎn)子互感L1m=0.237 8 H,定子電感L1s=0.2424H,轉(zhuǎn)子電感L1r= 0.2471H,極對數(shù)np1=2;懸浮控制繞組額定功率PN2=0.5 kW,定子電阻R2s=1.03 Ω,轉(zhuǎn)子電阻R2r=0.075 Ω,定、轉(zhuǎn)子互感L2m=0.009 3 H,定子電感L2s=0.012 H,轉(zhuǎn)子電感L2r=0.014 7 H,極對數(shù)np2=3,電動機轉(zhuǎn)子質(zhì)量m=2.85 kg,轉(zhuǎn)動慣量J=0.007 69 kg·m2。
對控制系統(tǒng)進行仿真,系統(tǒng)給定磁鏈為0.2 Wb,給定轉(zhuǎn)速為6 000 r/min,轉(zhuǎn)子x和y方向初始值都為200 μm。仿真時間為1 s,電動機啟動時負(fù)載轉(zhuǎn)矩為0,0.8 s加載2 N·m。
懸浮部分的穩(wěn)定運行是無軸承異步電動機穩(wěn)定運行的前提條件。圖2a表明電動機可以實現(xiàn)穩(wěn)定懸浮;圖2b表明定子磁鏈圓波動很小;圖2c為轉(zhuǎn)速輸出特性,轉(zhuǎn)速為6 000 r/min,超調(diào)量小于0.2%,穩(wěn)態(tài)誤差小于5 r/min;圖2d為轉(zhuǎn)矩輸出特性,可見電動機可以很好地跟蹤負(fù)載轉(zhuǎn)矩。
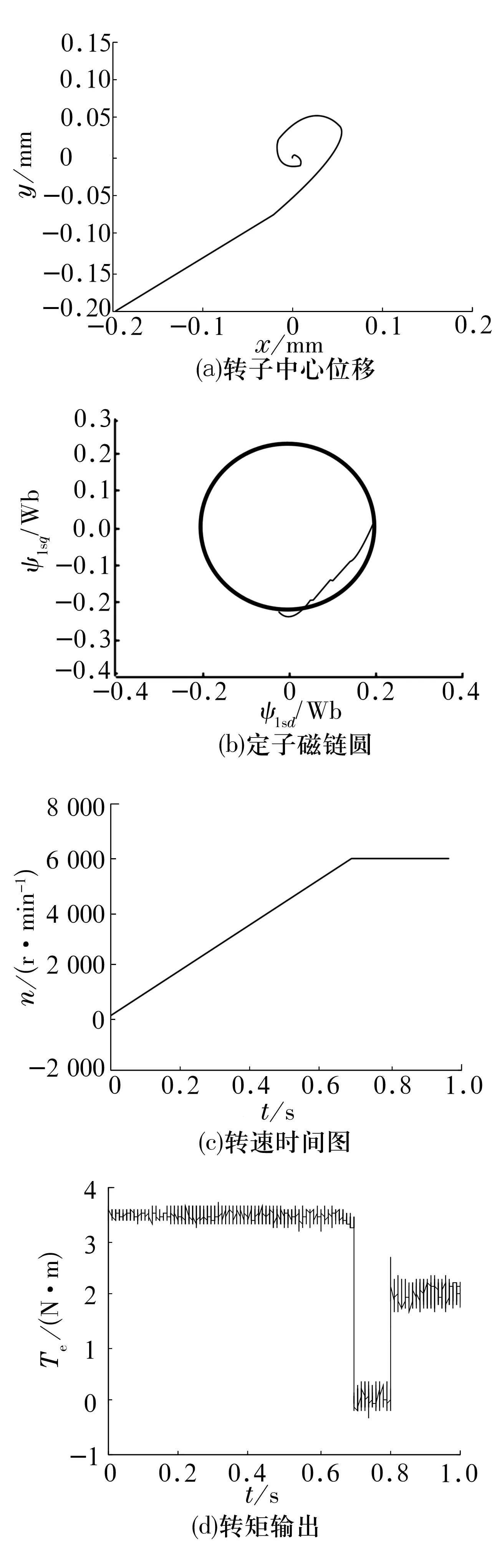
圖2 控制系統(tǒng)仿真圖
由圖3~圖5可知,基于離散時間無差拍的SVM-DTC方法與傳統(tǒng)的DTC方法相比,定子磁鏈的脈動由0.025 Wb減小到0.008 Wb,轉(zhuǎn)矩的脈動由2 N·m減小到0.3 N·m,x,y方向徑向位移由0.12 mm減小到0.053 mm。
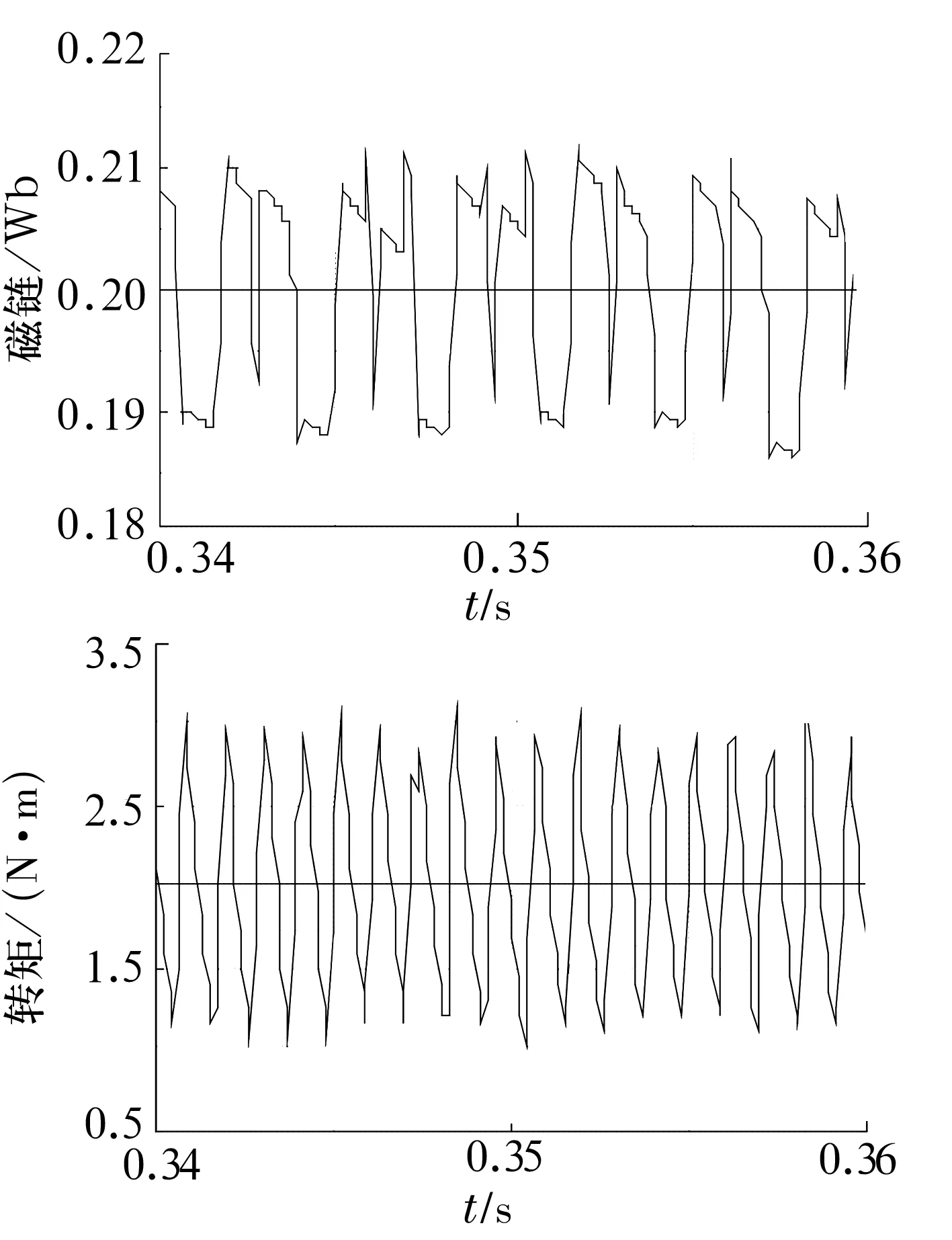
圖3 傳統(tǒng)DTC方法磁鏈與轉(zhuǎn)矩波形(圖中橫線為給定值,曲線為實際值)

圖4 基于離散時間無差拍的SVM-DTC方法磁鏈與轉(zhuǎn)矩波形(圖中橫線為給定值,曲線為實際值)
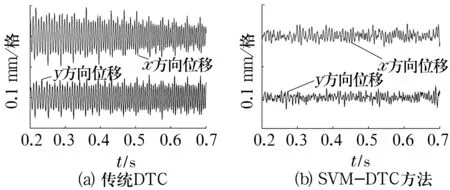
圖5 傳統(tǒng)DTC和基于離散時間無差拍的SVM-DTC方法的轉(zhuǎn)子的x,y方向位移
試驗測試采用的無軸承異步電動機參數(shù)與仿真參數(shù)一樣。選用TI公司的DSP2812控制器,核心算法為基于離散時間無差拍的SVM-DTC。當(dāng)電動機達到2 000 r/min且穩(wěn)定后,用示波器觀測轉(zhuǎn)子懸浮性能及兩套繞組的電壓及電流波形。
圖6為轉(zhuǎn)子徑向位移波形,示波器每格為10μm,可見試驗結(jié)果與仿真結(jié)果吻合,電動機可以實現(xiàn)穩(wěn)定懸浮。
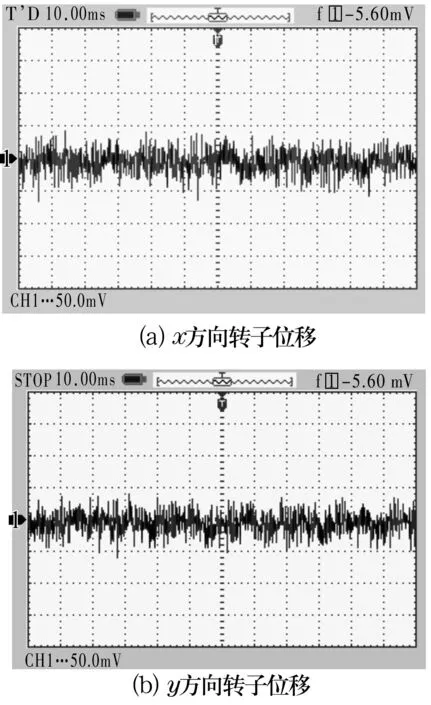
圖6 x,y方向轉(zhuǎn)子徑向位移
圖7a和圖7b為轉(zhuǎn)矩繞組的電壓U1ab與電流i1a的波形,穩(wěn)態(tài)時電動機轉(zhuǎn)矩繞組輸入的波形較好,電動機可以穩(wěn)定地運行;圖7c和圖7d為懸浮控制繞組的電壓U2ab與電流i2a波形,懸浮部分的電流波動較大,但基本符合正弦形狀,說明其控制性能很好。
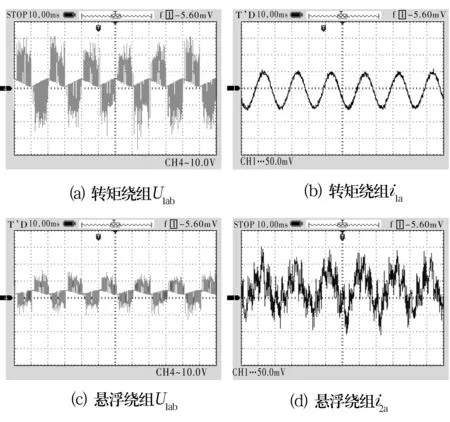
圖7 轉(zhuǎn)矩繞組與懸浮繞組電壓、電流波形
5 結(jié)論
(1) 基于離散時間無差拍的SVM-DTC算法不僅可以實現(xiàn)轉(zhuǎn)矩與磁鏈控制電壓的動態(tài)解耦,而且解決了轉(zhuǎn)矩環(huán)與磁鏈環(huán)的干擾問題,有利于控制參數(shù)的設(shè)定。控制電壓由電壓空間矢量脈寬調(diào)制實現(xiàn),有助于轉(zhuǎn)矩與磁鏈脈動的減小,并且使得逆變器具有固定的開關(guān)頻率,有利于電力電子器件能力的充分應(yīng)用。
(2) 與傳統(tǒng)的DTC相比,這種改進的算法可以更好地抑制無軸承異步電動機轉(zhuǎn)矩、磁鏈以及徑向位移的脈動,從而提高了電動機的懸浮性能,有助于無軸承異步電動機的高速與穩(wěn)定運行。
(3) 試驗結(jié)果表明文中所提算法具有很好的魯棒性,無軸承異步電動機可以實現(xiàn)穩(wěn)定懸浮。
