永磁同步電動機DTC的初始轉子位置估計方法
2012-07-23 06:38:02徐艷平王毅蘭鐘彥儒
微特電機 2012年3期
關鍵詞:信號
徐艷平,張 艷,王毅蘭,鐘彥儒
(1.西安理工大學,陜西西安710048;2.同濟大學,上海201804)
0引 言
在永磁同步電動機的高性能直接轉矩控制(DTC)中,如果轉子初始位置估計誤差超過30°電角度,就會導致在錯誤的扇區里選擇空間電壓矢量,直接導致起動失敗,因此為了實現電機的順利起動和可靠運行,必須首先要準確知道轉子的初始空間位置。在無位置傳感器控制系統中,轉子初始位置角是未知的,因此,對轉子初始位置準確估計是永磁同步電動機直接轉矩控制下無位置傳感器方式運行的實現基礎。
在目前已有的無位置傳感器控制方法中,常用的方法有三種:第一種是基于反電動勢的估算方法[1-2],這種方法在電機高速或者中速運行時,具有較好的效果,但當電機低速運行時由于反電勢較小,難以檢測,因此該方法不適用于電機的低速運行。第二種是基于各種觀測器的估算方法[3-4],包括模型參考自適應、狀態觀測器、擴展卡爾曼濾波器、滑模觀測器等方法,這些方法通常算法復雜,計算量大,并且易受電機參數變化的影響。第三種方法是根據電機的固有凸極性或者通過外加激勵引起的凸極性來估計轉子位置。在這種方法中,按照注入信號的不同,可分為注入電壓脈沖信號[5-7]和注入電壓正弦信號[8-11]。這種方法通常利用電機的凸極效應來獲得轉子位置信息,對電機參數不敏感,能夠實現電機在低速時對轉子位置的準確估計。
本文針對永磁同步電動機直接轉矩控制,詳細敘述了一種基于高頻電壓信號注入的永磁同步電動機初始轉子位置檢測原理,并對該方法進行了仿真研究。仿真結果表明這種方法能夠實現直接轉矩控制下對永磁同步電動機初始轉子位置的準確估計,該方法具有較好的魯棒性。
1初始轉子位置檢測原理
對永磁同步電動機初始轉子位置進行檢測時,首先向靜止的永磁同步電動機定子繞組注入三相高頻正弦電壓vh。由于電機仍處于靜止狀態,相當于僅由注入的高頻電壓vh供電,電機在轉子d-q軸坐標系下的數學模型可表示:

式中:vqh、vdh分別為高頻電壓的q軸和d軸分量;Rs為定子電阻;iqh、idh分別為高頻電流的q軸和d軸分量;Lq、Ld分別為電感的d軸和q軸分量;ωr為電機角速度;ψf為轉子永磁體磁鏈。
轉子角位移θr和所施加高頻電壓所產生的角位移θh計算:
式中:θr0為轉子初始位置;θh0為高頻電壓綜合矢量初始位置;ωh為所注入高頻電壓的角速度;fh為所注入高頻電壓信號的頻率。
假設轉子速度為0,θh0=0,由式(1)和(2)可得到高頻電流在d、q軸上的分量idh和iqh,則電流矢量幅值(t)方程如下:

其中:

根據式(4)和式(5)可知,當Ld≠Lq,即電機為凸極式永磁同步電動機時,當ωh足夠高時,k2幅值遠大于k1、k3,f2(t)的幅值遠大于f1(t)和f3(t)的幅值,因此式(4)可以簡化:



當θr0≠0時,|(t)|的最小值發生在:


向靜止時的電機注入高頻電壓信號,通過檢測高頻電流信號的每一個極值時刻及其所對應的高頻電壓產生的角位移,就可以實現電機的初始轉子位置估計。檢測出|(t)|的最大值和最小值所對應的θh(k):


即:

由于電機的實際轉子位置在0~2π范圍內,但估計出的轉子位置范圍為0~π。同時由于(t)是周期性的,測得的位置也在0~π范圍內周期性變化,因此為了區分θr0在π~2π之間的角度,就要利用電機的凸極效應,進行N/S極磁極檢測。
轉子磁鏈影響定子線圈產生的磁鏈如圖1所示,實心箭頭表示轉子磁體作用在線圈上的磁鏈,虛線箭頭表示電流作用在線圈上的磁鏈。圖1(a)表明轉子旋轉到N極線圈與線圈一致的位置,圖1(b)表明轉子旋轉到S極線圈與線圈一致的位置,圖1(c)表明轉子旋轉到S極N極與線圈的磁鏈相等的位置。當N極與線圈一致時,線圈中的電流使線圈磁鏈增加,增加了定子飽和度并稍微降低了定子電流為零時的電感。當S極與線圈一致時,線圈中的電流使線圈磁鏈減小,降低定子飽和度并稍微增大了定子電流為零時的電感。由于線圈N極和S極的電感不同,電感的變化使得定子電流不同。
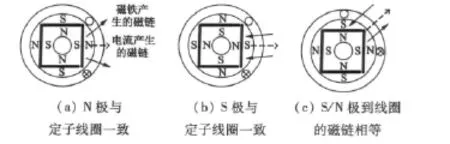
圖1 轉子磁鏈影響定子線圈產生的磁鏈
對電機進行磁極檢測只需要將注入的高頻電壓信號改為50 Hz的工頻信號即可,當N極與線圈一致時,正向電流磁通勢疊加在轉子磁通勢的方向上,磁飽和使得正電流幅值比負電流大;當正電流幅值比負電流小時,即S極與線圈一致。
2初始轉子位置估計的永磁同步電動機DTC系統
基于上述分析,采用初始轉子位置估計的永磁同步電動機直接轉矩控制系統的原理框圖如圖2所示。虛線框內為永磁同步電動機初始轉子位置估計原理,向電機注入高頻電壓信號后,可檢測出高頻響應電流信號,經過3/2變換后可得到高頻電流響應信號(t),然后對(t)進行最大值最小值檢測,在初始轉子位置估計模塊中計算出每個極值所對應的θh,再根據θh與初始轉子位置角之間的關系可估計出永磁同步電動機的初始轉子位置。
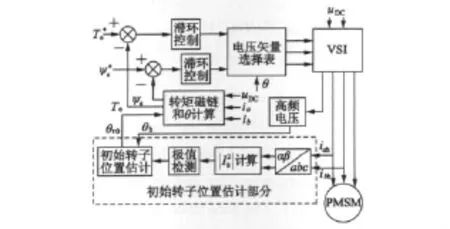
圖2 采用初始轉子位置估計的永磁同步電動機DTC框圖
圖2的虛線框外為永磁同步電動機傳統直接轉矩控制原理。系統檢測電機的三相定子電流和直流母線電壓可實時計算出轉矩和磁鏈,計算出的轉矩和磁鏈分別與其給定值作比較,經過滯環控制器產生磁鏈和轉矩控制信號,并與定子磁鏈所處的空間位置一起,共同決定要作用的電壓矢量,產生逆變器開關信號,進而控制電機的運行。
直接轉矩控制中的轉矩和磁鏈的計算是在定子兩相靜止坐標系中計算的,計算公式如下:
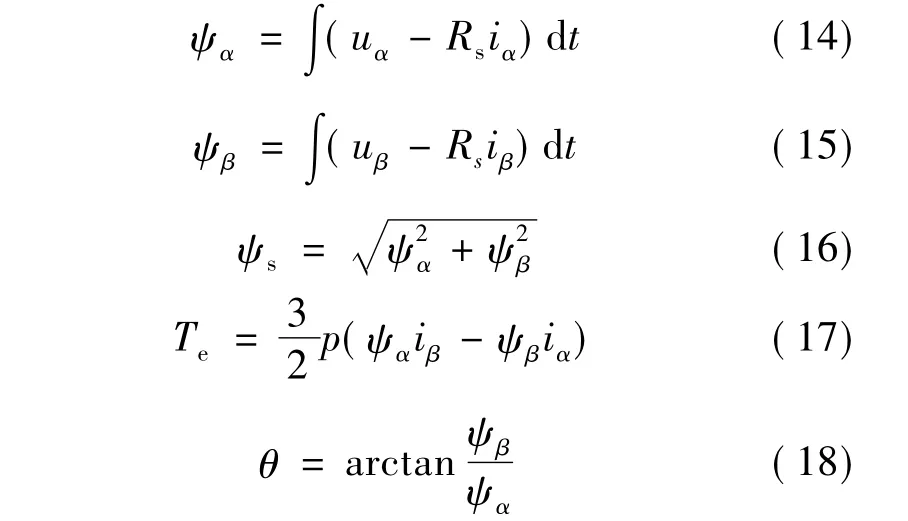
式中:uα、uβ、iα、iβ、ψα、ψβ分別為電機電壓、電流、定子磁鏈在兩相靜止坐標系α、β軸上的分量;ψs為定子磁鏈;Te為電磁轉矩;p為電機極對數;θ為定子磁鏈的空間位置。
3仿真分析
為了研究永磁同步電動機直接轉矩控制下初始轉子位置估計的可行性和正確性,本文針對一臺永磁同步電動機進行了仿真研究。仿真中的永磁同步電動機參數:定子電阻 0.2 Ω;永磁體磁鏈 0.24 Wb;d軸電感8.5 mH;q軸電感8.5 mH,極對數4對,轉子慣量1.23×10-3kg·m2。選擇注入高頻電壓信號的頻率為600 Hz,幅值為20 V,所得到的仿真結果如圖3所示。
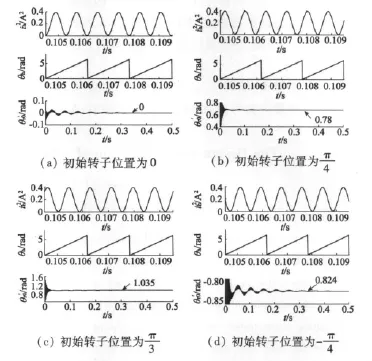
圖3 不同初始轉子位置下的系統仿真波形圖
同時,從圖3波形中也可以看到,在進行初始轉子位置估計的初始時刻,初始轉子位置估計值有微小振蕩,這是電機對突加高頻電壓信號作出的反應,大約0.15 s后,估計值就會穩定地收斂至初始轉子位置實際值。
4結 語
本文針對永磁同步電動機直接轉矩控制,研究了一種基于高頻電壓信號注入的初始轉子位置估計方法,仿真結果證明了這種方法能夠準確實現對永磁同步電動機不同初始轉子位置的準確估計,具有較好的魯棒性。在初始位置估計算法運行的開始時刻,盡管估計值有微小振蕩,但很快會穩定地收斂至電機的實際初始轉子位置,對整個控制系統的運行不會產生影響,同時,這種方法能夠較好地運行于直接轉矩控制中,對無位置傳感器永磁同步電動機的直接轉矩控制的實現具有重要意義。
[1] Morimoto S,Kawamoto K,Sanada M,et al.Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame[J].IEEE Transactions on Industry Applications,2002,38(4):1054-1061.
[2] 黃雷,趙光宙,年珩.基于擴展反電勢估算的內插式永磁同步電動機無傳感器控制[J].中國電機工程學報,2007,27(9):59-63.
[3] Liu Yingpei,Wan Jianru,Shen Hong,et al.PMSM speed sensorless direct torque control based on EKF[C]//IEEE ICIEA,2009:3581-3584.
[4] Yan Weisheng,Lin Hai,Li Hong,et al.A MRAS based speed identification scheme for a PM synchronous motor drive using the sliding mode technique[C]//IEEE ICMA.2009:3656-3661.
[5] Boussak M.Implementation and experimental investigation of sensorless speed control with initial rotor position estimation for interior permanent magnet synchronous motor drive[J].IEEE Transactions on Power Electronics,2005,20(6):1413-1422.
[6] 杜金明,安群濤,孫力.基于飽和效應的面貼式永磁同步電動機轉子初始位置檢測[J].電機與控制應用,2009,36(7):53-56.
[7] 韋鯤,金辛海.表面式永磁同步電機初始轉子位置估計技術[J].中國電機工程學報,2006,26(22):104-109.
[8] Jang Ji-hoon,Sul Seung-ki,Ha Jung-ik,et al.Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency[J].IEEE Transactions on Industry Applications,2003,39(4):1031-1039.
[9] 萬山明,吳芳,黃聲華.基于高頻電壓信號注入的永磁同步電機轉子初始位置估計[J].中國電機工程學報,2008,28(33):82-86.
[10] 賈洪平,賀益康.基于高頻注入法的永磁同步電動機轉子初始位置檢測研究[J].中國電機工程學報,2007,27(15):15-20.
[11] Kim Sung-yeol,Ha In-joong.A new observer design method for HF signal injection sensorless dontrol of IPMSMs[J].IEEE Transactions on Industrial Electronics,2008,55(6):2525 -2529.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
