基于旋轉高頻電壓注入的對轉PMSM無傳感器控制
2012-07-23 06:38:12徐海珠謝順依王松林
微特電機 2012年3期
徐海珠,謝順依,王 鼎,王松林
(海軍工程大學,湖北武漢430033)
0引 言
對轉永磁同步電動機[1]功率密度高、轉矩脈動小;徑向拉力小、無陀螺效應,有兩個機械輸出端口,可直接驅動對轉螺旋槳推進系統,在水下電力推進領域廣泛應用[2]。
對轉永磁同步推進電動機由一個定子和兩個永磁轉子組成,如圖1所示。外轉子和內轉子分別安裝徑向磁化的永磁體,定子兩側安裝螺線管繞組,繞組端部大大縮短,電機效率和功率密度大幅提高[3]。
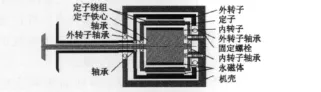
圖1 對轉永磁同步電動機的結構
電樞內外兩層繞組相序相反[1],在繞組兩側產生等大而反向旋轉的磁場,進而在兩個轉子上產生等大而反向的電磁轉矩。
在矢量控制和直接轉矩控制等高性能控制系統中,為了實現精確控制,位置、速度信息必不可少[4],通常需要在轉子軸上安裝機械傳感器。對轉永磁同步電動機有兩個轉子,至少需要六套霍爾傳感器和六個饋電環,才能得到轉子的準確位置,這使電機增加了體積、成本和復雜度,降低了可靠性和使用范圍。為了克服機械式傳感器帶來的缺陷,學者開展了無機械式傳感器系統的研究[5]。其中旋轉高頻電壓注入法結構簡單、魯棒性強,在全速度域內能獲得較高的跟蹤精度,應用最廣泛[6]。
文獻[7]探討了內轉子—外轉子式永磁電機的控制策略,這種電機只是使傳統永磁電機的定子旋轉起來,故其控制系統與傳統永磁電機沒有本質差別。文獻[8]探討了對轉永磁同步電動機的電磁模型和工作原理。但已有文獻中關于對轉永磁同步電動機控制策略的研究很少,特別是當推進器受到擾動時,兩轉子轉速發生差異,航行器易發生陀螺效應,限制了其在精密航行器上的應用。因此研究對轉永磁同步電動機的控制策略,維持其等速對轉特性,消除陀螺效應,對水下電力推進有重要意義。
本文針對凸極對轉永磁同步推進電動機穩態時雙轉子轉速相等的特點,設計了一種基于高頻旋轉電壓信號注入的轉子位置檢測方法,可在全速域內完成對轉永磁同步電動機的無傳感器控制,同時實現雙轉子的轉速跟隨。
1無傳感器控制原理
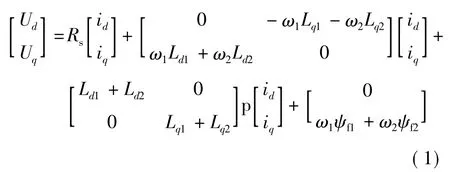
式中:Ud、Uq、id、iq為電機 dq 軸電壓和電流;p 表示對時間的導數;Ld1、Lq1為內轉子的 dq軸電感;Ld2、Lq2為外轉子的 dq軸電感;Ψf1、Ψf2、ω1、ω2分別為內外轉子的永磁磁鏈和機械角速度;Rs為內外電機的電阻。
設基波電壓和高頻電壓幅值分別為Vf、Vh,頻率分別為ωf、ωh,則對轉永磁同步電動機的輸入總電壓由兩者合成。因為高頻旋轉下ωf?ωh,電機反電勢主要由電感提供,即:

電機在每一個極距范圍內只呈現出一個空間凸極,由式(1)可得在基波頻率同步旋轉的坐標系中,高頻電壓激勵下,對轉永磁同步電動機的電流響應為[1,6]:

分母中也包含和位置有關的信息sin 2(θ1-θ2),但其幅值太小,可忽略。可得式(4):
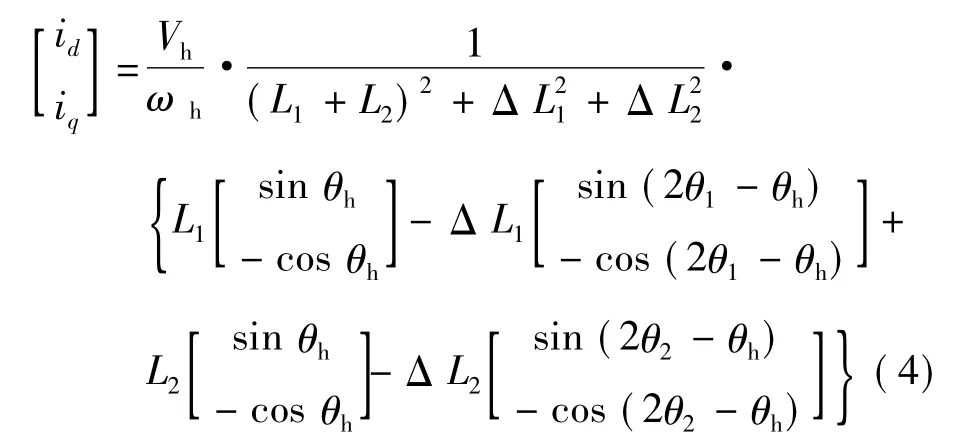
式中:θh=ωht,θh為高頻注入電壓旋轉角。高頻注入電壓被內轉子和外轉子凸極分別調制,因此可將電流分解為內轉子調制電流和外轉子調制電流。

式中:
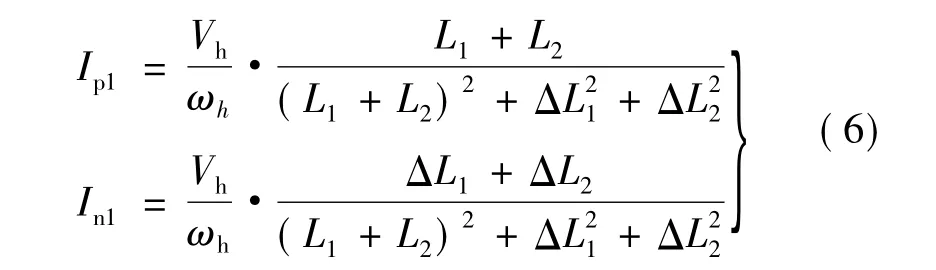
Ip1為內轉子調制電流的正序部分,與高頻注入電壓同方向旋轉;In1為內轉子調制電流負序部分,與高頻注入電壓反方向旋轉。同理,Ip2為外轉子調制電流正序部分;In1為外轉子調制電流負序部分。
由式(5)可知,只有高頻電流負序分量的相位中包含轉子位置θ1和θ2信息。
根據《山西省太谷縣城市飲用水水源保護區劃分技術報告》保護區劃分結果,龐莊水庫一級水域為取水口半徑300 m范圍內區域,保護面積0.079 5 km2,保護區周長1 298 m;二級水域為一級保護區以外的水域,保護區面積0.74 km2,保護區周長7 255 m;一級陸域為正常水位線942 m以上200 m范圍的陸域,保護區面積2.4 km2,保護區周長24 225 m;二級陸域為水庫上游周邊山脊線以內及入庫河流上溯3 000 m的匯水區域,保護區面積56.25 km2,保護區周長25 286 m。
2轉子位置觀測器
凸極對轉永磁同步電動機的輸入電壓中包含旋轉高頻電壓矢量時,其電樞響應電流主要有基頻電流、高頻響應電流、高頻PWM開關諧波電流。經過低通濾波器(LPF)可得到基頻電流進入電流控制器。只有高頻響應電流中的負序分量含有凸極位置信息,鎖定即可得到轉子位置信息。從定子電流信號中提取轉子位置信息包括五個步驟:
(1)采用帶通濾波器(BPF)得到高頻響應電流。
(2)采用同步軸系高通濾波器(SFF)去除響應電流中的正序分量。SFF將高頻響應電流轉換到一個與高頻電壓信號同步旋轉的坐標系中,正序電流信號變成一個直流信號,用高通濾波器濾除。

(3)通過坐標變換將載波電流的負序分量變換 到負序載波信號同步參考坐標系中,從而去除負序分量中的高頻分量。

(4)利用鎖相環(PLL)得到兩個轉子位置信息。穩態時兩個轉子轉速大小相等,可以通過鎖相環濾去電流中幅值較小的高階分量,得到電機兩個轉子的角頻率ω,積分后可得兩個轉子的位置估計值,如下:
式中:p、q為負序電流的基波正弦、余弦分量;r、s為二次諧波正弦、余弦分量;為內轉子、外轉子位置的估計值;為內轉子、外轉子位置的初始值。
(5)利用外差法得到兩個轉子的位置誤差ε1、ε2,跟蹤即可得到轉子位置的實際值。轉子位置觀測過程如圖2所示。
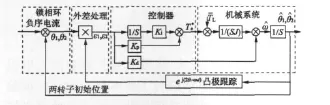
圖2 轉子位置觀測過程
3無傳感器控制系統
對轉永磁同步推進電動機中,內外電機的電樞串聯,僅控制電樞電流就可控制雙轉子的轉速。矢量控制系統采用轉速、電流雙閉環控制,內環電流采用id=0控制,外環為轉速控制。當電機受到瞬時擾動時,兩轉子負載不等,因而轉速產生差異,電機發生陀螺效應。系統對兩轉子采用相同的參考轉速,分別進行PI調節;采用外轉子轉角進行矢量變換,讓內轉子轉速跟隨外轉子轉速,保證電機擾動后兩個轉子轉速迅速恢復相等。控制系統如圖3所示。
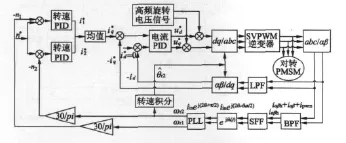
圖3 對轉永磁同步電動機無傳感器控制系統結構
4仿真結果及分析
對轉永磁同步電動機及無傳感器控制系統仿真模型的參數如下:磁通 0.185 Wb,電阻 0.4 Ω,交、直軸同步電感 8.5 mH,轉動慣量 0.015 kg·m2,極對數為6,額定轉速1 000 r/min,逆變器輸入直流電壓310 V,頻率為20 kHz。基頻電壓為100 Hz,高頻注入電壓頻率為750 Hz,幅度為基波幅度的1/10。其帶通濾波器的通帶設置在600 Hz和900 Hz之間。
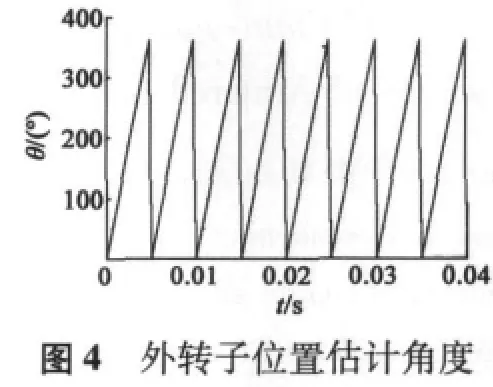
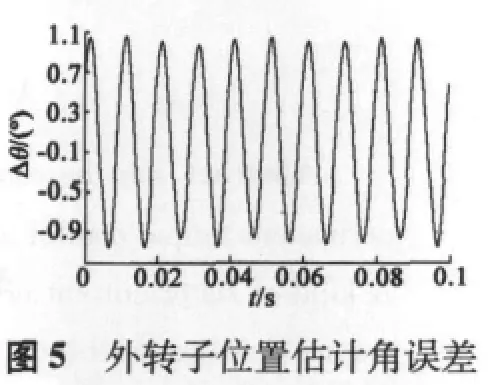
(1)位置估計。空載下電機分別以高速(1 000 r/min)、低速(300 r/min)旋轉。高速時具有較好的辨識速度和精度,低速時位置估計及誤差如圖4和圖5,可見轉子位置估算比較準確。
(2)轉速響應。仿真持續0.6 s,模擬電機擾動。0.1 s設置兩轉子的負載為[8,14]N·m,在0.2 s時負載突降為[3,5]N·m,0.4 s時負載驟增為[25,15]N·m,得到如圖6所示的電機給定轉速和實際轉速曲線。可見瞬態時轉速估計有一定誤差,穩態時轉速估計較為精確。
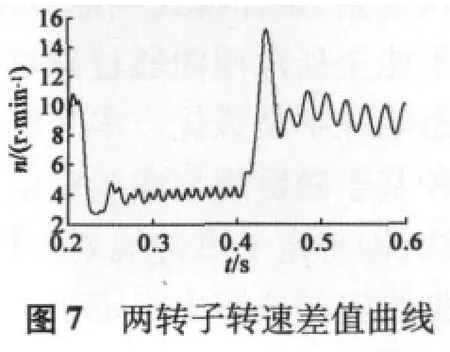
剛起動時,由于兩轉子負載差異,且控制策略還沒有發揮作用,兩轉子轉速差異較大,但在相同的參考轉速和內外轉子轉速跟隨的條件下,0.25 s后,兩個轉子轉速差異減至8 r/min,負載驟增時最大轉速差為15 r/min,僅為額定轉速的1.5%,如圖7所示。

5結 語
本文設計了一種基于高頻旋轉電壓注入的轉子位置檢測方法,可在全速域內實現對轉永磁同步電動機的無傳感器控制,設計了雙轉子的轉速跟隨測量,可以使對轉永磁同步電動機在擾動下抑制陀螺效應。結果表明,該方法結構簡單、響應迅速;實時性強,可靠性高,具有廣闊的應用前景。
[1] Chen Jinhua,Zhang Fengge.Design and finite element analysis on a novel PMSM with anti-rotation dual rotors[C]//Proceedings of the IEEE on Automation and Logistics.Shenyang,China,2009:315-319.
[2] Atsushi I,Hiroyasu S.Magnetic characteristic analysis of dual-rotor machines[C]//Proceedings of the 12th ISEM Bad Gastein.2007,25:173-177.
[3] Gottipati P.Comparitive study of double rotor permanent magnet brushless motors with cylindrical and disc type slot-less stator[D].Louisiana State University,Baton Rouge,2007.
[4] 王江濤,劉海琴,王劍.新型永磁同步電動機無傳感器智能控制系統[J].微特電機,2010(8):50-53.
[5] 何苗,劉政華.基于DSP的無傳感器永磁同步電機控制器設計[J].微特電機,2010(10):63-67.
[6] 王麗梅,郭慶鼎,鄭建芬.基于高頻信號注入法的永磁同步電動機無傳感器控制[J].沈陽工業大學學報,2004,26(6):648-651.
[7] Xiao Rujing,Yang Xiangyu.Simulation and analysis on novel dual rotor permanent magnet synchronous motor[C]//IEEE Int.Conf.on ICECE.Wuhan,2010:4204-4207.
[8] 趙峰,溫旭輝,劉鈞.永磁-永磁型雙機械端口電機系統建模[J].中國電機工程學報,2007,27(21):59-65.
[9] Qu Ronghai,Lipo T A.Dual rotor,radial flux,toroidally wound,permanent-magnet machines[J].IEEE Trans.on Industry Applications,2003,39(6):1665-1673.?
