基于FPGA的FPMSM滑模觀測器無傳感器控制
2012-07-23 06:36:58王明義楊貴杰趙品志
微特電機 2012年3期
王明義,楊貴杰,趙品志
(哈爾濱工業大學,黑龍江哈爾濱150001)
0引 言
隨著功率器件、現代電力電子技術和控制理論的發展,由逆變器供電的電機可以擺脫三相電網對電機相數的束縛。同三相電機相比,多相電機具有功率密度高、力矩波動小、效率高、可容錯控制等優點,在要求低壓高功率輸出、高可靠性等應用場合,多相電機的使用得到人們廣泛的關注[1-2]。在多相電機驅動系統的研究中,人們致力于容錯控制、脈寬調制算法、注入諧波對電機性能變化等方面的研究[3-5],而在多相電機無傳感器控制方面研究較少,但多相電機與無傳感器控制都具有高可靠性和高魯棒性[6],本文將多相電機的無傳感器控制作為研究重點,對五相永磁同步電動機無傳感器控制進行研究。
滑模控制由于具有對參數變化不敏感、對外部擾動的魯棒性和動態響應快等優點,廣泛應用在電機控制中。本文通過對五相永磁同步電動機(以下簡稱FPMSM)模型的分析,建立滑模觀測器位置估算模塊,輸入基波電壓和基波電流估算轉子角度。在基于FPGA的System Generator開發平臺上,采用模型系統級設計方法,實現了滑模觀測器位置估算仿真,并通過實驗驗證了該方法的有效性。
1 FPMSM數學模型
本文所研究的電機為表貼式FPMSM,它具有繞組正弦分布和轉子永磁體正弦磁場分布特性。為分析方便,假設FPMSM特性如下[7]:
(1)忽略磁路飽和、磁滯現象和渦流損耗;
(2)轉子永磁磁體在氣隙中產生的磁勢為正弦分布,無高次諧波;
(3)定子繞著加對稱五相正弦電流時,只產生正弦分布的磁勢,忽略高次諧波;
(4)電機隱極結構,交直軸電抗相等,即Ld=Lq。
1.1 FPMSM在a-b-c-d-e坐標系下數學模型
定子電壓方程:

定子磁鏈方程:


1.2 FPMSM 在 α1-β1-α3-β3-O 坐標系下數學模型
a-b-c-d-e坐標系到 α1-β1-α3-β3-O坐標系變換矩陣為:

α1-β1-α3-β3-0坐標系下電壓方程:

式中:Uαβ0=TUs=[uα1uβ1uα3uβ3u0]T;Iαβ0=TIs

本文電機為表貼式FPMSM,Ld=Lq=Ls。則A22簡化:

式中:C21= [-ψfωrsin θ ψfωrsin θ 0 0 0]T。
式(7)中前兩行基波方程中存在反電勢:

將式(7)整理為:

式(9)前兩行可以表示:


由式(3)可知,電機位置與反電勢有關,通過估計反電勢就可以得到轉子位置信息,本文利用基波反電勢進行轉子位置估算。
2基于滑模觀測器轉子位置估算
FPMSM模型的滑模觀測器狀態方程:

通常滑模觀測器采用高頻開關函數,但是由于開關時間和空間上的滯后,使滑模觀測器抖振現象嚴重,無法在工程中實踐,本文采用飽和函數作為控制函數,使觀測器具有較強的魯棒性,削弱抖振現象[8?。

式中:Δ為飽和區間臨界線,k為滑模增益,此系數需滿足可達性和存在性,觀測器才能進行滑模運動。
采用滑模觀測器對電流進行估計,其滑模超平面選擇:

由式(9)和(14)可得滑模觀測器動態方程:



根據等效控制原理,可以得到:

由式(15)和式(17)得到估算反電勢:

反電勢估算值在α1-β1軸的分量可求得轉子轉角估算值:


3滑模觀測器的SG/Simulink仿真
FPGA作為當代高性能信號處理的理想器件,具有高速并行運算的能力,它不僅包含查找表、寄存器、多路復用器,而且嵌入了快速乘法器、加法器,因此,FPGA在圖像處理、數字通信等領域得到了廣泛的應用。System Generator(SG)可以作為開發FPGA的設計方式,具有集靈活性、高效性和直觀性于一身的優點[9],其利用Xilinx公司的IP核構建相應數學模塊,這些模塊搭建的系統模型經過仿真驗證后可以生成Verilog HDL,縮短了FPGA開發時間。本文利用SG建立滑模觀測器部分,FPMSM和SVPWM等其他部分用Simulink搭建,利用Gateway模塊實現兩者無縫連接。
3.1滑模觀測器的SG建模
圖1為滑模觀測器的轉子轉角估算模塊,其組成部分包括滑模電流觀測器、濾波器、轉角補償等部分。估算過程為把電流觀測器得到的估算電流與定子電流實測值輸入給控制函數,輸出控制變量Zs,Zs經過濾波處理后得到Zss,利用Zs和Zss估算反電勢es,通過es分量計算角度估算值,最后加入角度補償等到轉子角度θ。
根據以上原理,分析得到SG構建FPMSM的滑模觀測器位置估算模型,其中輸入FPMSM定子基波電流 iα1、iβ1,基波電壓 uα1、uβ1,速度 ω,輸出為估算角度θ,如圖2所示。
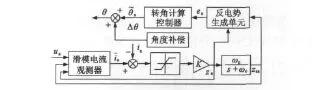
圖1 滑模觀測器模塊圖

圖2 SG構建的滑模觀測器模型
3.2 仿真結果
為了驗證以上估算策略的正確性,本文利用Simulink搭建了FPMSM矢量控制模型。利用SG搭建了滑模觀測器模塊,仿真得到估算位置、估算定子電流、估算反電勢等波形。
仿真用電機參數選取為定子相電阻Rs=4 Ω,定子基波相電感Ld1=Lq1=45 mH,定子三次諧波相電感Ld3=Lq3=5 mH,電機極對數p=1,電機轉動慣量 J=0.8 ×10-6kg·m2。在負載轉矩為 0.5 N·m,電機轉速為800 r/min的情況下進行仿真。
轉子轉角實際值和估算值波形如圖3所示。可以看出,基于SMO的轉子轉角估算值與轉子轉角的真實值基本一致。

圖3 轉子轉角仿真波形
α1-β1坐標系下實際和估算電流的仿真波形如圖4所示。估算電流在滑模面上作滑模運動,與實際電留幅值和相位基本一致,由于滑模觀測器固有的抖振現象,因此估算電流出現抖振。
圖5為控制函數輸出控制變量波形。反電勢es被包容于控制變量Zs中,因此利用濾波器得到估算反電勢。


4 FPGA實現及實驗結果
為驗證SG設計SMO模塊的正確性,實驗平臺是以XC3S1200E為核心的控制系統,電機為實驗室內部設計的FPMSM,電機參數如表1所示。

表1 實驗電機參數
將SG設計的滑模觀測器生成Verilog HDL代碼嵌入到FPMSM控制程序中,利用XC3S1200E的IO口將估算的位置信號輸出,通過調節滑模系數k、臨界區間Δ等參數,輸出了與實際位置相匹配的估算位置,如圖6所示。圖7為電機實際轉速與估算轉速波形。電機為開環起動,結果表明,估算轉速能很好跟蹤實際轉速,抖振現象微弱。
由實驗可知,在電機轉速為510 r/min時,利用SG建模設計的SMO模塊可以很好地估算出FPMSM的位置信號,說明可以利用 FPGA開發FPMSM滑模觀測器無傳感器控制的可行性。

圖6 轉子實際角度、估算角度實驗波形

圖7 轉子實際轉速與估算轉速波形
5結 語
本文通過對FPMSM模型分析,建立了電機的滑模觀測器位置估算模型,并在觀測器中使用了飽和函數來削弱抖振,通過加入角度補償方式,減少了濾波器帶來的角度偏差。利用SG搭建了滑模觀測器模塊,經過仿真驗證了此方法的正確性。實驗證明此方法是可行的,減少了利用FPGA開發FPMSM無位置控制的開發周期。
[1] EMIL L.Multiphase electric machines for variable-speed applications[J].IEEE Transactions on Industrial Electronics,2008,55(5):1893-1909.
[2] Singh G K.Multi-phase induction machine drive research a survey[J].Electric Power Systems Research,2002,61(2):139-147.
[3] Nicola B,Silverio B.Strategies for fault toler ant current control of a five-phase permanent-magnet motor[J].IEEE Transactions on Industry Applications,2007,43(4):960-968.
[4] 趙品志,楊貴杰,劉春龍.五相電壓源逆變器SVPWM優化算法[J].電機與控制學報,2009,13(4):516-522.
[5] Arahal M R,Duran M J,Barrero F.Stability analysis of five-phase induction motor drives with variable third harmonic injection[J].Electric Power Systems Research,2010,80(12):1459-1468.
[6] De Belif F M L,Mel J A.Application of a voltage adaptive sensorless current controller to multi-phase PMSM[C]//International Symposium on Advanced Electromechanical Motion Systems and E-lectric Drives Joint Symposium,2009:1-6.
[7] Yu Fei,Zhang Xiaofeng,Qiao Minzhong.The direct torque control of multiphase permanent magnet synchronous motor based on low harmonic space vector PWM[C]//IEEE International Conference of Industrial Technologies.2008:1-5.
[8] 魯文其,黃文新,胡育文.永磁同步電電動動機新新型型滑模觀測器無傳感器控制[J].控制理論與應用,2009,26(4):429-432.
[9] 吳平仿,吳定會,紀志成.SVPWM的SG設計及FPGA實現[J].微特電機,2006(10):26-19.
