無(wú)人機(jī)視覺(jué)輔助著陸中的姿態(tài)和位置估算
2012-08-27 13:13:00唐大全尹洪偉
電光與控制 2012年1期
李 飛, 唐大全, 沈 寧, 尹洪偉, 唐 波
(1.海軍航空工程學(xué)院,山東煙臺(tái) 264001; 2.中國(guó)人民解放軍92514部隊(duì),山東煙臺(tái) 264001)
0 引言
據(jù)資料統(tǒng)計(jì),無(wú)人機(jī)回收階段的故障數(shù)占整個(gè)任務(wù)執(zhí)行階段故障數(shù)的80%,因此無(wú)人機(jī)著陸導(dǎo)航技術(shù)受到廣泛關(guān)注。由計(jì)算機(jī)視覺(jué)發(fā)展起來(lái)的視覺(jué)輔助導(dǎo)航方法,具有精度高、不受電子干擾等特點(diǎn),因此在無(wú)人機(jī)的著陸導(dǎo)航中受到越來(lái)越多的關(guān)注[1]。視覺(jué)輔助導(dǎo)航方法主要是通過(guò)安裝在飛機(jī)上的攝像機(jī),獲得著陸點(diǎn)附近的圖像,使用計(jì)算機(jī)視覺(jué)算法,估計(jì)飛機(jī)的飛行狀態(tài)和相對(duì)于著陸點(diǎn)的位置和方位,結(jié)合其他機(jī)載傳感器的信息,實(shí)現(xiàn)無(wú)人機(jī)的自主著陸控制。
目前在利用視覺(jué)進(jìn)行著陸的研究中,研究最多的是提取跑道邊緣線和地平線等線特征來(lái)估算飛機(jī)的姿態(tài)和位置[2-6]。然而在戰(zhàn)時(shí),公路等簡(jiǎn)易機(jī)場(chǎng)都可以作為無(wú)人機(jī)的著陸場(chǎng),這時(shí)候,地平線的提取易受建筑物、高山等地形的影響,跑道邊緣線的提取容易受河流、公路等具有線特征地物的影響。
為了克服這些缺點(diǎn),本文尋找易辨識(shí)的特征。特殊標(biāo)識(shí)的點(diǎn)在圖像中較容易辨識(shí),這些點(diǎn)在夜晚可以是布置在跑道附近的燈光點(diǎn),白天可以布置特殊形狀的物體或者提取跑道附近特殊圖案的角點(diǎn);然后尋求地面上的點(diǎn)和圖像上的點(diǎn)之間的對(duì)應(yīng)關(guān)系,結(jié)合計(jì)算機(jī)視覺(jué)算法,提取出無(wú)人機(jī)著陸需要的相對(duì)跑道位置信息和姿態(tài)信息,同時(shí)結(jié)合最小中值法提高了精度。
1 坐標(biāo)系及坐標(biāo)變換
1.1 方程坐標(biāo)系介紹
在本文的研究中用到跑道坐標(biāo)系、機(jī)體坐標(biāo)系、攝像機(jī)坐標(biāo)系,3個(gè)坐標(biāo)系之間的關(guān)系如圖1所示。
各坐標(biāo)系的定義如下。跑道坐標(biāo)系P:ZP軸沿跑道中心線指向進(jìn)場(chǎng)方向;XP軸在跑道平面內(nèi),與ZP垂直且指向右;YP軸垂直跑道平面且向下。

圖1 幾種坐標(biāo)系之間的關(guān)系Fig.1 The relation among the coordinate systems
攝像機(jī)坐標(biāo)系C:攝像機(jī)固聯(lián)在飛機(jī)上,坐標(biāo)原點(diǎn)為光學(xué)中心;ZC為光軸方向;XC垂直于飛機(jī)對(duì)稱(chēng)面指向飛機(jī)右側(cè);YC由笛卡兒右手系決定。為了論述方便,假設(shè)攝像機(jī)系和機(jī)體系是重合的。
1.2 坐標(biāo)系變換
如何將跑道坐標(biāo)系中的特征點(diǎn)投影到成像平面,是研究的基礎(chǔ),這個(gè)投影過(guò)程分為以下兩步。
1)跑道坐標(biāo)系向攝像機(jī)坐標(biāo)系的變換,公式為

其中:旋轉(zhuǎn)矩陣R由3個(gè)姿態(tài)角組成;平移矩陣D由飛機(jī)相對(duì)跑道的位置構(gòu)成。
2)攝像機(jī)坐標(biāo)系向圖像坐標(biāo)系變換近似為小孔成像。圖像坐標(biāo)系的原點(diǎn)O1為光軸與圖像平面的交點(diǎn);f為焦距;(x,y)為攝像機(jī)系中參考點(diǎn)在圖像上的投影坐標(biāo)。則有投影公式為
2 飛機(jī)姿態(tài)位置解算
下面將分兩步解算飛機(jī)的姿態(tài)和位置:第一步求出特征點(diǎn)在攝像機(jī)系中的坐標(biāo)[7];第二步根據(jù)攝像機(jī)坐標(biāo)及其對(duì)應(yīng)的跑道坐標(biāo)系坐標(biāo),解算出飛機(jī)的姿態(tài)和位置[8]。
2.1 解算特征點(diǎn)在攝像機(jī)坐標(biāo)系中的坐標(biāo)
假設(shè)已知3個(gè)特征點(diǎn)在跑道系和圖像系上的坐標(biāo)。

圖2 3個(gè)特征點(diǎn)的幾何圖形Fig.2 The geometry figure of 3 feature points
3個(gè)特征點(diǎn)在攝像機(jī)系中坐標(biāo)。dij(i,j=1,2,3)為這3個(gè)特征點(diǎn)在跑道系中的對(duì)應(yīng)距離,根據(jù)圖2中的對(duì)應(yīng)關(guān)系,有并且參考式(2)(為了表述方便,這里用Xi代替,等式便可寫(xiě)成

對(duì)于N=3個(gè)點(diǎn),有


對(duì)于此多項(xiàng)式方程,最多有4個(gè)解。如果得到唯一解,根據(jù)X1是正數(shù),可以將其唯一確定,然后根據(jù)式(2)便可確定其他兩個(gè)坐標(biāo)值。
為了得到唯一解需要再多增加幾個(gè)點(diǎn)。對(duì)于N個(gè)點(diǎn),能夠得到(N(N-1))/2個(gè)fij(Xi,Xj)=0,進(jìn)而得到((N-1)(N-2))/2個(gè)四次方程g(X)=0。
對(duì)于N=4,得到3個(gè)諸如式(5)的等式,寫(xiě)成矩陣形式

令 t5=(t0,t1,t2,t3,t4)=(1,X,X2,X3,X4)T,則方程(6)可看作齊次線性方程組。對(duì)該齊次線性方程組運(yùn)用奇異值分解的方法[9]便可求得唯一解。
同樣對(duì)于任意N≥5個(gè)點(diǎn),都可以獲得如式(6)形式的齊次線性方程組,再利用奇異值分解的方法即可求得唯一解。
2.2 解算飛機(jī)姿態(tài)位置
由于飛機(jī)的姿態(tài)和位置構(gòu)成了旋轉(zhuǎn)矩陣R和平移向量D,因此可以通過(guò)求出R和D得出飛機(jī)的姿態(tài)和位置。首先利用正交化算法[8]。假設(shè)跑道上3個(gè)點(diǎn)P1,P2,P3,在攝像機(jī)坐標(biāo)系對(duì)應(yīng)坐標(biāo)為 C1,C2,C3。記為

顯然,Up=(rp1,rp2,rp3)和 Uc=(rc1,rc2,rc3)是正交陣,于是,其中
在實(shí)際成像過(guò)程中,往往存在成像噪聲,一些點(diǎn)的誤差可能大于兩三個(gè)像素,甚至?xí)霈F(xiàn)匹配誤差,如果直接利用這些匹配點(diǎn)將產(chǎn)生較大的誤差,魯棒性會(huì)很差。根據(jù)文獻(xiàn)[10],將最小中值法用于計(jì)算旋轉(zhuǎn)矩陣和平移向量可以大大提高算法的魯棒性。
下面以4點(diǎn)算法為例,對(duì)最小中值法進(jìn)行闡述。
1)從圖像平面上的點(diǎn)(1,2,…,n)中隨機(jī)選出4個(gè)點(diǎn),例如,J=(1,2,3,4)。
2)利用4點(diǎn)定位算法求得這4個(gè)點(diǎn)在攝像機(jī)系中的坐標(biāo),并由圖像匹配給出對(duì)應(yīng)的跑道系坐標(biāo)。
3)重復(fù)1)~2),得出第k種隨機(jī)點(diǎn)樣本組合的跑道系坐標(biāo)和攝像機(jī)系坐標(biāo)。假設(shè)共取m個(gè)樣本組合。
4)取出3)中m種樣本組合的第k種。4個(gè)點(diǎn)對(duì)為(P1,P2,P3,P4),(C1,C2,C3,C4),在這 4 個(gè)點(diǎn)中,任取3個(gè)點(diǎn)進(jìn)行組合,共有4種組合,如第1種點(diǎn)對(duì)的組合為(P1,P2,P3) 和(C1,C2,C3),若(P1,P2,P3) 和(C1,C2,C3)中的一組3個(gè)點(diǎn)共線或接近共線,則舍棄不用,否則對(duì)(P1,P2,P3)和(C1,C2,C3)使用正交化算法求出旋轉(zhuǎn)矩陣和平移向量,4種組合解算完畢求出沒(méi)有舍棄的組合的平均值RJ和DJ。
5)計(jì)算殘差平方為

6)計(jì)算中值為


3 卡爾曼濾波方法的應(yīng)用
已知系統(tǒng)狀態(tài)為:X(k)=[Xb,Yb,Zb,Vx,Vy,Vz,ψ,?,γ,r,q,p]T,(Xb,Yb,Zb)為飛機(jī)在跑道坐標(biāo)系中的位置;(Vx,Vy,Vz)為飛機(jī)在橫向、垂直、縱向的速度;(ψ,?,γ)為飛機(jī)的航向角、俯仰角、滾轉(zhuǎn)角;(r,q,p)為橫滾角速度、俯仰角速度、偏航角速度。濾波測(cè)量量由第2節(jié)求得的飛機(jī)姿態(tài)和位置給出:Z(k)=[Xb,Yb,Zb,ψ,θ,γ]T。飛機(jī)的位置從某一時(shí)刻到下一時(shí)刻的系統(tǒng)轉(zhuǎn)移關(guān)系為

飛機(jī)的姿態(tài)角與上一時(shí)刻姿態(tài)角和轉(zhuǎn)動(dòng)角速度的關(guān)系為
由式(12)和式(13)可以得出系統(tǒng)的狀態(tài)轉(zhuǎn)移矩陣。
在得到了上述條件和飛機(jī)的初始時(shí)刻參數(shù)后,應(yīng)用卡爾曼濾波方法[11],就可得到每個(gè)時(shí)刻飛機(jī)的姿態(tài)和位置。
4 仿真與分析
參考國(guó)際民航組織精密進(jìn)場(chǎng)著陸Ⅲ級(jí)精度要求,提出無(wú)人機(jī)著陸導(dǎo)航系統(tǒng)導(dǎo)航精度要求:到達(dá)著陸點(diǎn)時(shí),垂直精度高于1.97 m;橫向精度高于13.45 m。由于跑道長(zhǎng)1000 m,所以對(duì)于縱向的位置偏差并沒(méi)有做要求。俯仰角精度高于0.5°,滾轉(zhuǎn)角精度高于0.5°,航向角精度高度高于0.5°。
4.1 仿真條件
構(gòu)建20個(gè)隨機(jī)點(diǎn),這些點(diǎn)在沿跑道橫向服從均值為0,標(biāo)準(zhǔn)方差為100的正態(tài)分布,在沿跑道縱向0~1000 m內(nèi)服從均勻隨機(jī)分布,并且假設(shè)在點(diǎn)匹配過(guò)程中存在兩對(duì)錯(cuò)誤匹配點(diǎn)。
飛機(jī)初始下滑高度為60 m,距離跑道起點(diǎn)縱向距離為1000 m。飛機(jī)下滑角為-3°,攝像機(jī)光軸與飛機(jī)縱軸夾角3°,且在飛機(jī)縱軸下方,下滑速度為40 m/s。系統(tǒng)噪聲方差陣為對(duì)角陣,前6 個(gè)對(duì)角元素為[2,2,2,0.25,0.25,0.25],后6 個(gè)對(duì)角元素均為(0.5π/180)2。測(cè)量噪聲方差陣為對(duì)角陣,對(duì)角元素為[5,5,5,(0.5π/180)2,(0.5π/180)2,(0.5π/180)2]。
4.2 仿真結(jié)果分析
基于上述仿真條件,使用MatlabR2009a軟件進(jìn)行仿真,取N為4,即針對(duì)4點(diǎn)算法情況進(jìn)行仿真,著陸導(dǎo)航信息誤差圖見(jiàn)圖3和圖4。

圖3 位置估計(jì)誤差Fig.3 The position estimation error
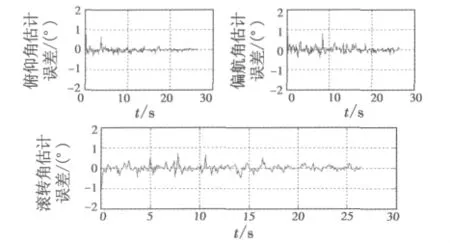
圖4 姿態(tài)估計(jì)誤差Fig.4 The attitude estimation error
由圖3可知,對(duì)著陸安全性要求最高的橫向位置誤差基本能夠控制在5 m以?xún)?nèi),尤其是當(dāng)距離機(jī)場(chǎng)越近時(shí),誤差越小,20 s后,距離機(jī)場(chǎng)縱向距離為201 m,橫向誤差基本在2 m以?xún)?nèi);高度誤差基本控制在1.5 m以?xún)?nèi),20 s后,距離地面高度在18 m,高度誤差控制在0.5 m以?xún)?nèi);縱向誤差維持在10 m以?xún)?nèi)。由圖4可知,俯仰角的誤差精度基本控制在0.5°內(nèi),尤其進(jìn)入10 s后,精度達(dá)到 0.2°以?xún)?nèi),進(jìn)入 20 s后,精度達(dá)到 0.1°以?xún)?nèi);偏航角在仿真開(kāi)始時(shí)誤差較大,但隨著距離機(jī)場(chǎng)越近時(shí),誤差逐漸減小,進(jìn)入20 s后,精度達(dá)到0.2°;滾轉(zhuǎn)角始終保持在0.5°的精度范圍。綜上所述,本文所提算法滿足無(wú)人機(jī)著陸要求。
最小中值法對(duì)于提高算法的魯棒性至關(guān)重要,文章對(duì)最小中值法和常用的最小二乘法的效果進(jìn)行了對(duì)比。兩種方法的方差對(duì)比結(jié)果如表1和表2所示。由表1和表2可知,最小中值法解算出的導(dǎo)航信息的精度要遠(yuǎn)大于最小二乘法,究其原因,主要是噪聲和錯(cuò)誤匹配點(diǎn)的影響,最小二乘法假設(shè)噪聲是高斯分布的,這是合理的,因?yàn)辄c(diǎn)的誤差往往在一兩個(gè)像素之內(nèi),但是有一些點(diǎn)可能沒(méi)有很好地提取或者存在錯(cuò)誤匹配,其誤差要遠(yuǎn)大于兩三個(gè)像素,這些點(diǎn)將嚴(yán)重影響導(dǎo)航信息估計(jì)的精度;而最小中值法能夠排除誤差較大的那些匹配點(diǎn),由于僅考慮殘差的中值,理論上即使有接近50%的錯(cuò)誤數(shù)據(jù),最小中值法都能給出精度很高的導(dǎo)航信息估計(jì)。

表1 位置誤差方差對(duì)比Table 1 The contrast of position error variance

表2 姿態(tài)誤差方差對(duì)比Table 2 The contrast of attitude error variance
此外,文章還對(duì)N為5的情況進(jìn)行了實(shí)驗(yàn)仿真,即5點(diǎn)算法的情況。通過(guò)分析,使用4點(diǎn)算法解算一幀圖像平均耗時(shí)52 ms,而使用5點(diǎn)算法解算一幀圖像平均耗時(shí)320 ms,對(duì)于實(shí)時(shí)性要求很高的無(wú)人機(jī)著陸,5點(diǎn)算法不可取。
5 結(jié)束語(yǔ)
針對(duì)無(wú)人機(jī)在公路等簡(jiǎn)易機(jī)場(chǎng)著陸的情況,分析了線特征作為著陸輔助特征的缺點(diǎn),并選取點(diǎn)特征進(jìn)行輔助降落,運(yùn)用N點(diǎn)算法和正交化算法求出了飛機(jī)的姿態(tài)和位置,考慮到噪聲的影響,引入最小中值法和卡爾曼濾波法提高了算法的精度。通過(guò)仿真驗(yàn)證了文章所提算法解算出的位置和姿態(tài)均能滿足著陸導(dǎo)航要求,并且通過(guò)對(duì)比分析了最小中值法對(duì)提高魯棒性的作用,最后通過(guò)實(shí)驗(yàn),發(fā)現(xiàn)5點(diǎn)算法的實(shí)時(shí)性無(wú)法滿足著陸要求。
在公路等簡(jiǎn)易機(jī)場(chǎng)上,基于輔助特征點(diǎn)的視覺(jué)著陸在本文中得到了探索,為無(wú)人機(jī)視覺(jué)著陸的研究提供了一種新的思路。
[1] 陳海.無(wú)人機(jī)自主控制綜述及自主著陸控制系統(tǒng)設(shè)計(jì)[D].西安:西北工業(yè)大學(xué),2007.
[2] PAN Xiang,MA Deqiang.Vision-based approach angle and height estimation for UAV landing[C]//IEEE Congress on Image and Signal Processing,2008:801-805.
[3] LIU Tianshu,F(xiàn)LEMING G.Videogrammetric determination of aircraft position and attitude for vision-based autonomous landing[C]//The 44th AIAA Aerospace Sciences Meeting and Exhibit,2006,1437:1-35.
[4] 朱憲偉,李由.機(jī)載視覺(jué)自主著陸過(guò)程中的跑道提取方法[J].國(guó)防科技大學(xué)學(xué)報(bào),2009,31(2):20-24.
[5] TRISIRIPISAL P,PARKS M R.Stereo analysis for visionbased guidance and control of aircraft landing[C]//44th AIAA Aerospance Sciences Meeting and Exhibit.Reno,Nevada,2006,1438.
[6] 陳龍勝,陳謀,姜長(zhǎng)生.基于視覺(jué)信息的無(wú)人機(jī)自主著陸過(guò)程姿態(tài)和位置估計(jì)[J].電光與控制,2009,16(5):47-51.
[7] 馬頌德,張正友.計(jì)算機(jī)視覺(jué)[M].北京:科學(xué)出版社,1998:53-56,159-162.
[8] QUAN Long,LAN Zhongdan.Linear N-point camera pose determination[J].IEEE Transactions On Pattern Analysis And Machine Intelligence,1999,21(8):774-780.
[9] 陳祖明,周家勝.矩陣輪引論[M].北京:北京航空航天大學(xué)出版社,1998:192-195.
[10] GHYZEL P A.Vision-based navigation for autonomous landing of UAV[D].Naval Postgraduate School,2000.
[11] 付夢(mèng)印.Kalman濾波理論及其在導(dǎo)航系統(tǒng)中的應(yīng)用[M].北京:科學(xué)出版社,2010.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33