基于進給系統(tǒng)反饋信號的摩擦辨識方法*
2012-09-12 07:46:26李鵬勃梅雪松
組合機床與自動化加工技術 2012年11期
李鵬勃,趙 飛,梅雪松,陶 濤,馮 斌
(西安交通大學機械工程學院,西安 710049)
基于進給系統(tǒng)反饋信號的摩擦辨識方法*
李鵬勃,趙 飛,梅雪松,陶 濤,馮 斌
(西安交通大學機械工程學院,西安 710049)
為了準確辨識進給系統(tǒng)摩擦特性,提高數(shù)控機床加工精度,論文以Stribeck摩擦模型作為辨識對象,針對傳統(tǒng)的摩擦辨識方法存在的問題,提出了在分析加速運動過程反饋信號的基礎上再進行勻速測試的辨識方法。基于該方法進行實驗,并使用EMD(Empirical Model Decomposition)方法和最小二乘法對實驗數(shù)據(jù)分析后得到了摩擦模型的參數(shù);實驗結果表明文中提出的方法與傳統(tǒng)的摩擦模型辨識方法對比,具有操作簡單、節(jié)省實驗時間和辨識準確的特點。
進給系統(tǒng);摩擦辨識;反饋信號;EMD
0 引言
對于數(shù)控機床的伺服進給系統(tǒng),摩擦環(huán)節(jié)是提高系統(tǒng)性能的障礙,會使系統(tǒng)響應出現(xiàn)爬行、振蕩或穩(wěn)態(tài)誤差[1]。為了減小摩擦對數(shù)控機床性能的影響,目前主要通過兩種方法降低摩擦的影響:一是選擇合適的控制策略;二是對摩擦進行補償,基于摩擦模型的補償方法是近年來的研究熱點,其關鍵是如何選擇一個合適的摩擦模型并且對模型參數(shù)進行準確的辨識[2]。Stribeck模型由于考慮了負斜率現(xiàn)象,能夠以90%的精度近似擬合低速區(qū)域的摩擦力[3],因此本文選擇Stribeck摩擦模型作為辨識對象。
摩擦模型的辨識方法主要有在線辨識方法和離線辨識方法兩類。在線辨識是利用系統(tǒng)實時運行中得到的數(shù)據(jù)來估計摩擦模型,Kaan Erkorkmaz等人利用Kalman濾波器進行了摩擦辨識[4],李書訓采用一種非線性摩擦觀測器在線測得摩擦模型[5]。在線辨識的優(yōu)點是能夠實時跟蹤系統(tǒng)摩擦模型的參數(shù)變化,但缺點是具有摩擦動態(tài)辨識功能的控制器設計復雜。離線辨識方法是進行勻速測試實驗,然后建立穩(wěn)態(tài)速度和摩擦力的關系。Johnson在沒有考慮電機影響的前提下通過實驗數(shù)據(jù)計算得到了黏性摩擦系數(shù)和庫倫摩擦力值[6];叢爽通過調整Matlab仿真參數(shù)使輸出和實際輸出一致來辨識模型參數(shù);田政采用最小二乘法進行了辨識[7]。
離線辨識中使用的勻速測試存在一個問題:對于不同的條件,勻速測試時的速度測試范圍和測試間距很難選擇。因此,有必要尋找確定摩擦非線性區(qū)對應速度范圍的方法,來合理的規(guī)劃勻速測試時速度測試范圍和間距。為了提高參數(shù)的辨識效率和精度,提出了在分析加速運動過程反饋信號的基礎上再進行勻速測試的辨識方法。結合EMD自適應濾波數(shù)據(jù)預處理方法,優(yōu)化了摩擦參數(shù)辨識過程。
1 摩擦模型和辨識原理
1.1 Stribeck摩擦模型簡介
摩擦模型分為靜態(tài)摩擦模型和動態(tài)摩擦模型兩類。靜態(tài)摩擦模型包括庫倫摩擦模型、庫倫+黏性摩擦模型、靜摩擦+庫倫+黏性摩擦模型、Stribeck摩擦模型等。動態(tài)摩擦模型包括Dahl模型、Blimansorine模型、LuGre模型等。
Stribeck摩擦模型和其他摩擦模型相比,具有辨識相對容易,描述摩擦模型比較精確的特點,在伺服進給系統(tǒng)摩擦研究領域得到了廣泛應用。C.Canudas de Wit等人使用Stribeck模型實現(xiàn)了自適應摩擦補償,Kaan Erkorkmaz等人將Stribeck摩擦模型作為摩擦模型進行了前饋補償研究[4],馮斌等對一伺服平臺用Stribeck模型進行了補償[8]。
Stribeck摩擦模型描述了摩擦力和相對運動速度之間的關系,表達式[3]如下:

將速度作為橫坐標,摩擦力作為縱坐標,得到如圖1所示的Stribeck摩擦模型曲線。
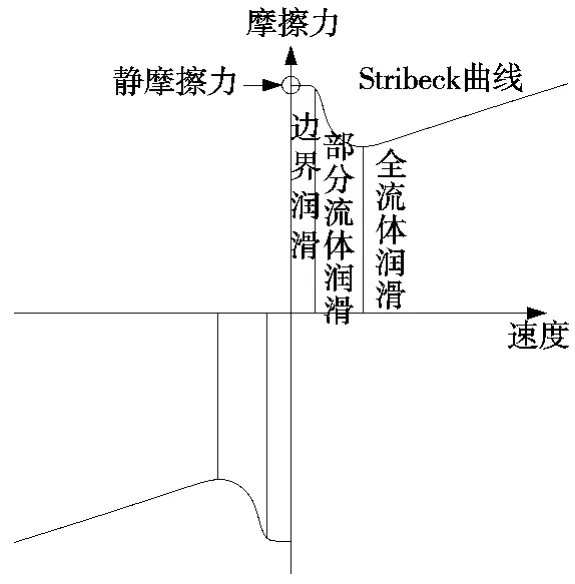
圖1 Stribeck摩擦模型示意圖
主要分為四個區(qū)域:靜摩擦區(qū)域、邊界潤滑區(qū)域、部分流體潤滑和全流體潤滑。靜摩擦階段,接觸面沒有相對運動,只有很小的預滑動。邊界潤滑階段,驅動力克服最大靜摩擦力后開始相對運動,但未形成油膜。部分流體潤滑階段有油膜形成,但接觸面并未完全脫離。全流體潤滑階段,油膜將兩個接觸面分離,黏性摩擦力占主導地位。
1.2 辨識原理
對于滾珠絲杠直線進給系統(tǒng)有如下方程[2]:
在疾病架構中,若不進行手術,疾病無法痊愈,對應于若不進行實質性的改革,經濟不會有太大起色,同理,在旅程架構中,若不真正的改變路線和方向,旅途仍會一路坎坷,對應于經濟狀況不會有太大改善。這些觀點源于2008年金融危機后,許多外媒將中國視為世界經濟的救命稻草,對中國的經濟寄予厚望,而近兩年中國經濟走勢放緩,媒體在報道中則開始“唱衰”。
Tm是電機輸出力矩,J為系統(tǒng)等效慣量,B為系統(tǒng)粘滯摩擦系數(shù),ω為電機角速度,Tfc為摩擦力矩。將上式右端第二項粘滯摩擦力矩和Tfc庫倫摩擦力矩的和寫作Tf,將右端第一項寫作Ta,則上式表示為:
當系統(tǒng)勻加速運動時,Ta為定值,上式兩端求導得到:
那么可以通過Tm電機力矩的變化來分析摩擦力矩的變化來確定摩擦非線性區(qū)對應的速度范圍。雖然加速過程中摩擦力矩是變化的,但是控制系統(tǒng)能夠使得電機輸出力矩跟隨負載變化來保持勻加速運動過程。
當系統(tǒng)勻速運動即加速度為0時,Ta為零,那么有:
那么測得當前的速度和電機輸出力矩就可以得到該速度下的摩擦力矩。
對于力矩,可以采集電機的電流信號或轉矩監(jiān)測信號來得到。對于加速運動過程和勻速運動過程不同時刻的速度,可以借助于對進給系統(tǒng)的位置反饋信號差分得到。
2 摩擦辨識實驗
2.1 實驗臺設計
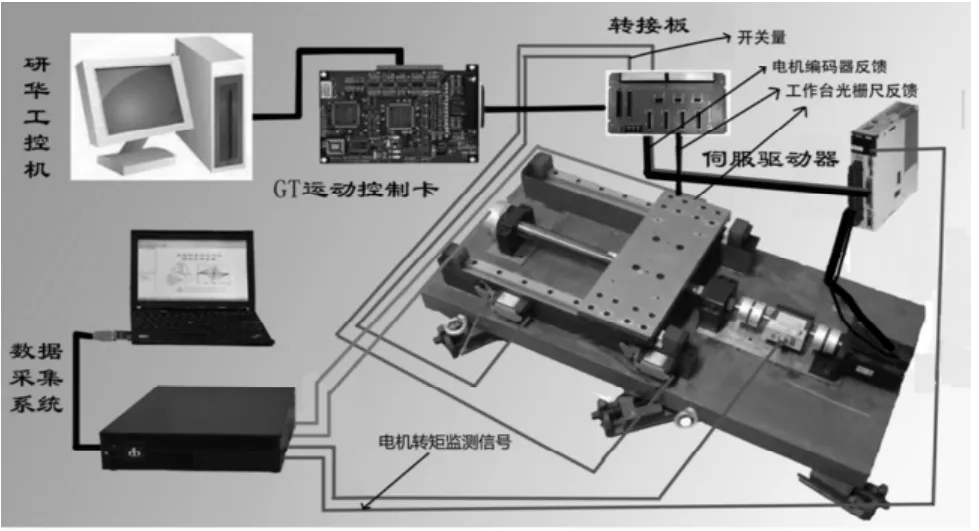
圖2 試驗臺示意圖
2.2 實驗方案設計
為了對摩擦模型進行精確的辨識,采用在分析加速運動過程反饋信號的基礎上再進行勻速測試的辨識方法。實驗分為兩個部分:加速測試和勻速測試。
加速測試時,使工作臺以一定的加速度做勻加速直線運動,采集運動過程中電機轉矩監(jiān)測信號、工作臺光柵反饋信號。然后對采集到的數(shù)據(jù)進行分析,得到摩擦非線性區(qū)對應的速度范圍。
勻速測試時,基于加速測試得到的摩擦非線性區(qū)對應的速度范圍,合理地規(guī)劃勻速測試的速度測試范圍和測試間距;然后使工作臺以各個規(guī)劃速度勻速運行,采集轉矩監(jiān)測信號和光柵尺信號;最后對勻速測試的數(shù)據(jù)進行處理得到辨識摩擦模型參數(shù)所需要的數(shù)據(jù)。
2.3 加速測試
第一次加速測試中,讓系統(tǒng)在3.277s的時間內,速度從0勻速上升到15mm/s。同步采集伺服驅動器轉矩監(jiān)測值Tm和工作臺光柵尺位置值Xt。采集到的電機轉矩監(jiān)測信號和差分計算后的速度信號有嚴重的噪聲,如圖3所示。
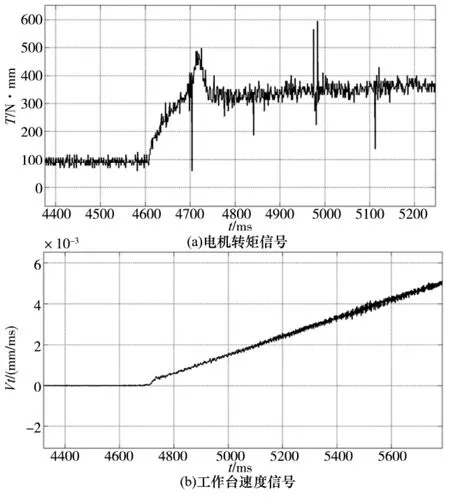
圖3 測試噪聲曲線
EMD方法作為一種自適應濾波方法具有較好的效果[9]。因此本文采用EMD方法首先對電機轉矩信號進行濾波,得到的模式分量如圖4所示。
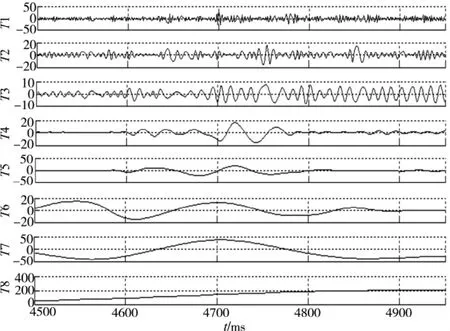
圖4 轉矩信號的EMD分解結果
由于一、二階模式分量反映了信號的細節(jié)問題,在頻域屬于高頻成分,故而從原始信號中減去一階和二階模式分量,將得到的信號作為反映電機力矩的信號,濾波前后信號如圖5所示。
對工作臺速度信號也進行同樣的處理,將其和力矩信號繪制在一起如圖6所示。
從圖中可以看出,第一階段:4.618s至4.713s,工作臺速度在0附近波動,加速度基本為0,系統(tǒng)處于靜摩擦狀態(tài)。第二階段:4.713s時刻電機輸出力矩克服了靜摩擦力矩,系統(tǒng)進入邊界潤滑狀態(tài),雖然電機輸出力矩有所減小,但是摩擦力矩也有所減小,故而速度開始增加,加速度基本恒定,但大于設定加速度。第三階段:從4.726s開始,系統(tǒng)進入部分流體潤滑狀態(tài),雖然電機輸出力矩迅速減少,但摩擦力矩也迅速減少,故而速度繼續(xù)增加,雖然加速度有所減小,但仍然大于設定加速度。第四階段:從4.742s開始,系統(tǒng)進入全流體潤滑狀態(tài),電機轉矩和摩擦轉矩都隨著速度增加而繼續(xù)增加,加速度在設定加速度附近波動。
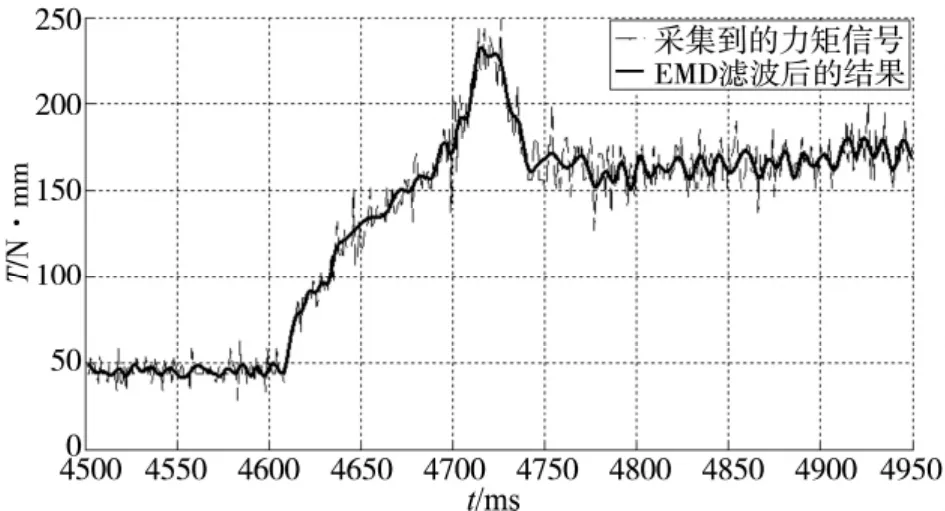
圖5 轉矩信號濾波前后對比
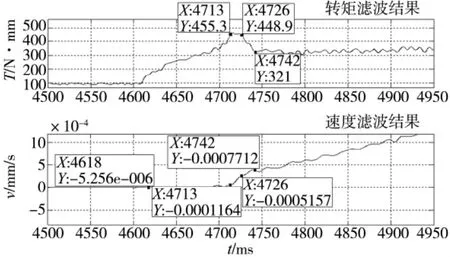
圖6 轉矩信號和速度信號濾波結果
綜上所述,系統(tǒng)克服靜摩擦后,在邊界潤滑和部分流體潤滑階段,電機轉矩和摩擦力矩都隨著速度的增大而減小;在全流體潤滑階段,電機轉矩和摩擦力矩都隨速度的增大而增大。電機轉矩變化反映了摩擦力矩的變化。那么可以認為部分流體潤滑和全流體潤滑的分界速度,就是勻加速運動過程中當速度增大,電機轉矩不再減小而開始增大的時刻系統(tǒng)的速度。通過求局部極值算法得到4.742s處力矩具有局部最小值,此點之后,電機轉矩整體趨勢是隨著速度增加的,變化過程可以用表1說明。
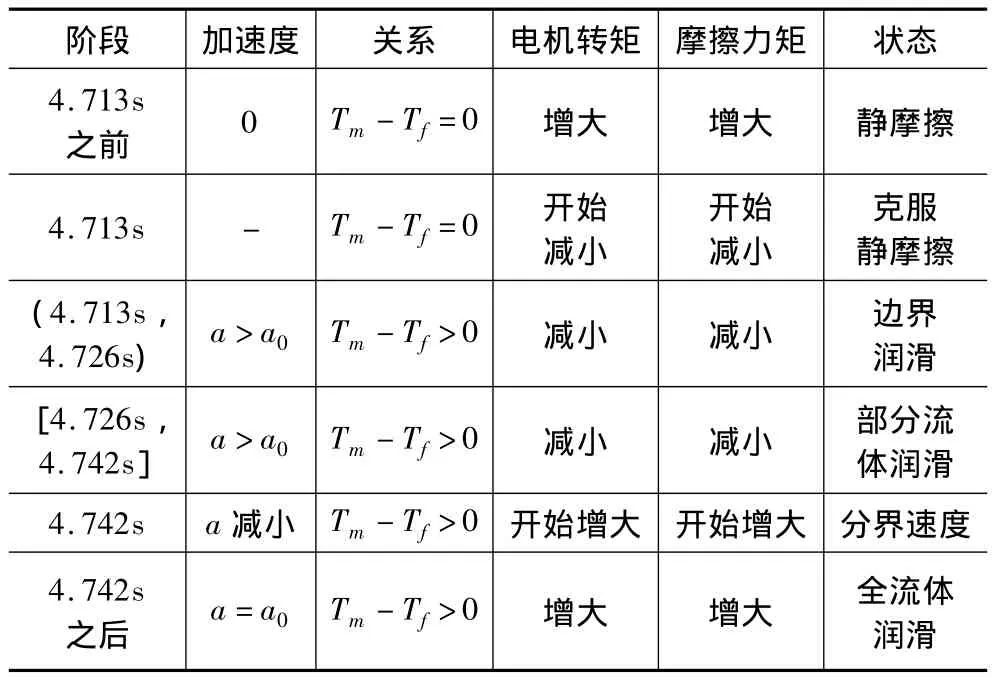
表1 加速過程狀態(tài)分析
部分流體潤滑和全流體潤滑轉換的時刻為4.742s,對應的工作臺在4.740s-4.745s的位置為:0.0079mm,0.0083mm,0.0086mm,0.0090mm,0.0093mm和0.0097mm。此時刻的速度為:0.36mm/s。
再進行三次加速測試,速度分別從0勻加速到7.5mm/s,15.0mm/s,7.5mm/s,對應的潤滑狀態(tài)轉換處速度如表2所示。
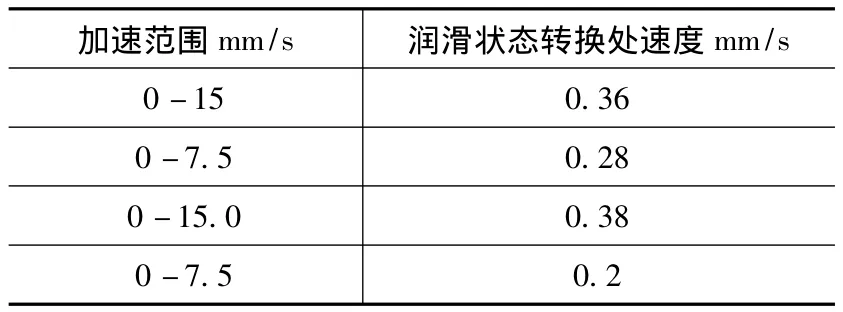
表2 多次加速測試分析結果
可以認為部分流體潤滑和全流體潤滑的轉換速度在0.2-0.4mm/s之間;系統(tǒng)的摩擦非線性區(qū)對應的速度范圍為0-0.4mm/s;當速度大于0.4mm/s時,系統(tǒng)工作在摩擦線性區(qū)。
通過對多次加速測試過程中伺服進給系統(tǒng)的光柵反饋信號和電機轉矩監(jiān)測信號的分析,不僅得到了系統(tǒng)的摩擦非線性區(qū)對應的速度范圍,而且基本確定了部分流體潤滑和全流體潤滑轉變的速度。這不僅對于摩擦辨識時的勻速實驗設計具有幫助,而且對評價當前的潤滑和磨損狀態(tài)具有一定的參考價值[10]。
2.4 勻速測試
基于加速測試的分析結果:系統(tǒng)的摩擦非線性區(qū)對應的速度范圍為0-0.4mm/s。進行如下的速度規(guī)劃:對0-0.4mm/s的速度范圍內進行了16次勻速測試,0.4-2mm/s的速度范圍內進行了5次勻速測試。
勻速測試中,按規(guī)劃的速度使工作臺運動10s,將光柵尺反饋的總位移值除以時間作為實際速度;將采集到的轉矩信號求平均值得到當前速度下的電機輸出轉矩。由于勻速運動時系統(tǒng)加速度為0,電機輸出力矩Tm和摩擦力矩Tf相等。將21次實驗數(shù)據(jù)的處理結果以速度為橫坐標,摩擦力矩為縱坐標繪制圖形,得到如圖7所示結果。
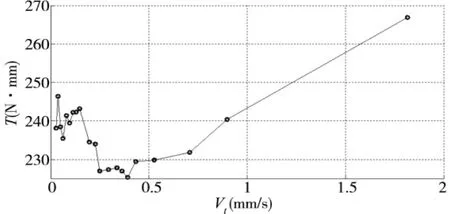
圖7 勻速測試獲得的實驗數(shù)據(jù)
3 實驗數(shù)據(jù)處理和實驗驗證
3.1 實驗數(shù)據(jù)處理
首先以0.4mm/s為分界將速度劃分為低速段和高速段,然后進行線性擬合,得到以下結果:低速段(v=0-0.4mm/s)方程為:

高速段(v>0.4mm/s)方程為:

低速段和縱軸交點的縱坐標即為靜摩擦力矩,大小為244.16N·mm;高速段和縱軸交點的縱坐標為庫倫摩擦力矩,大小為214.76N·mm;高速段斜率即為粘滯摩擦因數(shù):B=0.028N·m/(mm/s);Stribeck模型中的Vs和δ待求。
δ為形狀系數(shù),一般在1和2之間選擇。通過圖8可以知道δ應該選擇2,Vs在0.2-0.25之間選擇。
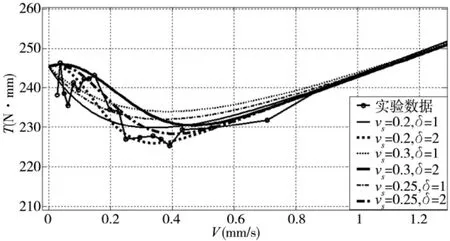
圖8 δ和Vs對模型形狀的影響
為了求Vs,使用最小二乘法。首先將Vs=0.20,0.21,0.22,0.23,0.24 和 0.25 分別代入模型,然后求出不同速度下模型值與實驗測量值的誤差的平方和,發(fā)現(xiàn)當Vs=0.22mm/s時,平方和最小。所以可以得到摩擦模型為:

3.2 實驗驗證
為了驗證本文提出的方法的有效性,進行了常規(guī)的勻速測試。進行了33次常規(guī)勻速測試,并且將實驗結果繪制到同一圖中,如圖9所示,可以發(fā)現(xiàn)通過對加速過程中反饋信號分析得到摩擦非線性區(qū)對應速度范圍后,合理規(guī)劃速度進行勻速測試的摩擦辨識方法,與傳統(tǒng)的勻速測試相比,可以減少實驗次數(shù),節(jié)省實驗時間,辨識準確度相當。
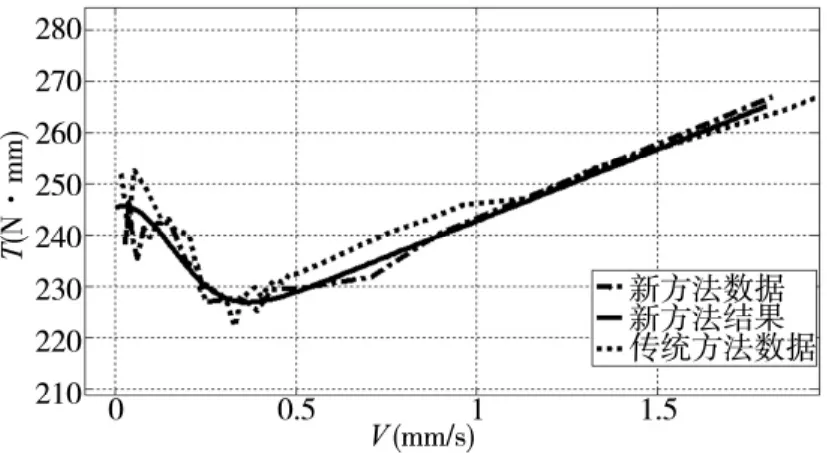
圖9 兩種方法的對比
4 結束語
本文針對傳統(tǒng)的勻速測試方法無法進行速度規(guī)劃的問題,提出了在分析加速運動過程反饋信號的基礎上再進行勻速測試的辨識方法。與單純的勻速測試方法對比,本文提出的方法既能確定摩擦非線性區(qū)對應的速度范圍,又能克服傳統(tǒng)勻速測試存在的速度無法合理規(guī)劃的問題,達到節(jié)省試驗時間,準確地辨識摩擦模型的目的。
[1]劉強,爾聯(lián)潔,劉金琨.摩擦非線性環(huán)節(jié)的特性、建模與控制補償綜述[J].系統(tǒng)工程與電子技術,2002,24(11):45-53.
[2]XS Mei,M Tsutsumi,T Yamazaki,et al.Study of the friction error for a high-speed high precision table[J].International Journal of Machine Tools&Manufacture.2001,41:1405-1415.
[3]劉麗蘭,劉宏昭,吳子英,等.機械系統(tǒng)中摩擦模型的研究進展[J]. 力學進展,2008,25(5):201-213.
[4]K Erkorkmaz,Y Altintas,High speed CNC system design.PartⅡ:modeling and identification of feed drives[J].International Journal of Machine Tools& Manufacture.2001,41:1487-1509.
[5]李書訓,姚郁,馬杰.基于觀測器的伺服系統(tǒng)低速摩擦補償分析[J]. 電機與控制學報,2004,4(1):27-30.
[6]Craig T.Johnson,et al.Experimental identification of friction and its compensation in precise,position controlled mechanisms[J].Transactions on Industry Applications.1992,28(6):1392-1398.
[7]田政.采用限定記憶區(qū)間最小二乘法辨識DC伺服系統(tǒng)摩擦非線性參數(shù)的方法[J].信息與控制,1997,26(6):446-473.
[8]馮斌,等.開放式數(shù)控系統(tǒng)摩擦補償?shù)膶崿F(xiàn)[J].機床與液壓,2011,39(19):7-9.
[9]F Zhao,X Mei,et al.Fault diagnosis of a machine tool rotary axis based on a motor current test and ensemble empirical mode decomposition method[J].Mechanical Engineering Science,2011,225(5):1121-1129.
[10]B.Armstrong,Pierre Dupont and C.Canudas de Wit.A survey of models,analysis tools and compensation methods for the control of machines with friction[J].Automatic,1994,30(7):1038-1183.
A Friction Identification Method Based on Feedback Signals of Servo Feed System
LI Peng-bo,ZHAO Fei,MEI Xue-song,TAO Tao,F(xiàn)ENG Bin
(School of Mechanical Engineering,Xi’an Jiaotong University,Xi’an 710049,China)
In order to accurately identify the friction status of servo feed system and improve the processing accuracy of the numerical control machine,this paper selects the Stribeck friction model and proposes an identification method,which,to solve the problems of the traditional one,uses constant velocity tests based on the feedback signals analysis of servo feed system during the acceleration process.The parameter values of the friction model are acquired through analyzing the experimental data with the EMD and the least square method.The contrast between the proposed method and the traditional one shows the new method is accurate,time-saving and easy to conduct.
servo feed system;friction identification;feedback signals;EMD
TH16;TG65
A
1001-2265(2012)11-0004-04
2012-02-03
國家自然科學基金項目(50875203);國家重點基礎研究發(fā)展規(guī)劃資助項目(2011CB706805)
李鵬勃(1988—)男,甘肅人,西安交通大學碩士研究生,研究方向為高速高精度運動控制技術,(E-mail)pengbo_li@126.com。
(編輯 李秀敏)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34