復雜背景中紅外弱小目標檢測技術研究
2012-09-18 02:33:02趙峰
上海航天 2012年1期
趙 峰
(中國人民解放軍駐上海無線電設備研究所軍事代表室,上海 200090)
0 引言
紅外圖像處理中弱小目標檢測是難點。由于小目標亮度低,所占像素點很少,形狀和面積信息均不明顯,目標檢測難度大,而背景的復雜性更增大了小目標檢測的難度。近年來,為有效檢測與跟蹤紅外圖像序列中弱小目標,相繼提出了各種算法,主要可分為基于空域信息的單幀目標檢測與基于時域信息的多幀關聯目標檢測算法兩類[1]。基于空域信息的檢測利用目標像素強度檢測出目標,通過序列圖像投影獲得目標運動軌跡,即跟蹤前檢測(DBT)算法;基于時域信息的目標檢測算法對假設航跡包含的點作相關處理,經若干幀累計后獲得檢測結果與目標的航跡,即檢測前跟蹤(TBD)算法。
由于單幀圖像中目標的信噪比和信擾比很低,DBT類算法對劇烈干擾中的弱小運動目標的檢測效果較差。TBD類算法能沿目標運動軌跡積累目標能量,有效利用目標與背景像素在時間軸方向上的特性差異提高信雜比,增加目標檢測率,對目標的最大幀間運動速率約束小。但該類算法是基于一系列對應像素點的操作,故存在像素點配準需要,對成像平臺的穩定性提出了較高的要求。基于空域信息的DBT類算法能避免此問題,且計算量小。本文綜合兩類算法,對一種組合時域與空域特性的紅外序列圖像中運動點目標檢測算法進行了研究。
1 目標檢測
1.1 最大中值預處理
紅外背景圖像預處理技術主要包括空域和頻域濾波,目的是消除噪聲和背景信號對后續目標探測與跟蹤的影響。與其他空間濾波器相比,中值濾波器能在衰減噪聲的同時不使邊緣模糊,但中值濾波慢于一般的卷積運算,因為需對模板中所有像素灰度進行排序。本文采用一種改進的最大中值濾波預處理技術:選擇模板尺寸為奇數,分別求取行、列,以及對角線方向的灰度中值,以這4個中值的最大值為模板的計算結果。該濾波模板在保證不影響邊緣銳度的條件下減少了中值計算中需排序的像素數。用原始圖像減去最大中值濾波結果,較好抑制了所得的殘差圖中平滑背景,有效提高了信雜比。
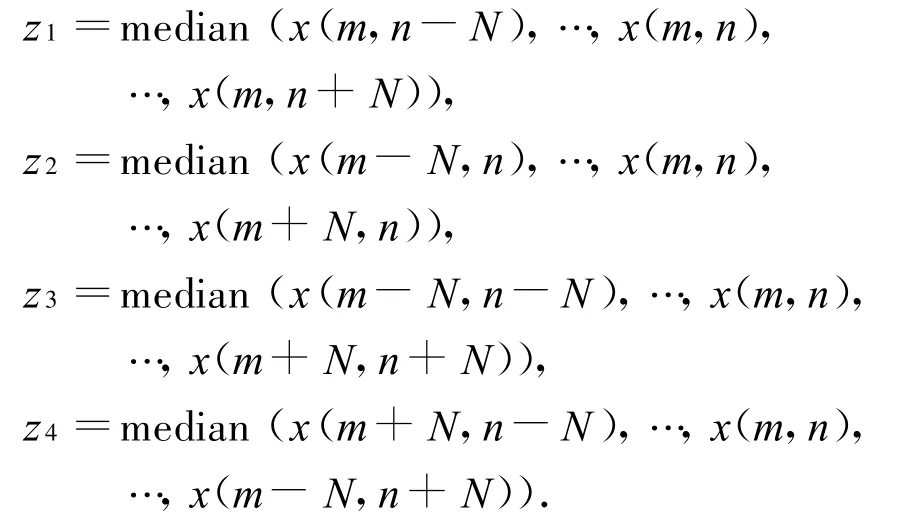
令x為輸入圖像,y(m,n)為經大小為2N+1的最大中值濾波模板獲得的輸出圖像,則定義

式中:z1~z4分別為算得的行、列,以及對角線方向的灰度中值,且
1.2 時域方差濾波
時域濾波廣泛用于紅外圖像目標探測,能有效增強目標的信噪比,提高檢測率。由大量實驗數據可認為,絕大多數條件下紅外圖像的時域噪聲分布符合高斯模型[2]。本文的時域方差濾波方法也基于該條件。
時域方差濾波方法為:對最大中值濾波預處理后的圖像序列,當前幀的每個像素值由前T幀的時域方差遞歸算得,有

式中:(σt)2,μt分別為每個像素的時域方差及其均值,且μt=。從當前幀每個像素的時域方差值中減去圖像序列中前一幀的估計方差,差值圖像即為輸出。在差值圖像中,噪聲像素輸出接近于零,而由于位置的關聯性,當前幀中疑似目標像素的方差值會明顯增強。輸出殘差圖像中每個像素值

對目標運動速度大于1像素/幀的圖像,該方法能較有效去除大面積云層、小面積快速運動云層的干擾,減少單幀圖像中的高頻噪聲,降低虛警率。
1.3 自適應分割
經濾波處理后的圖像,信噪比有明顯改善。本文用直方圖對時域方差濾波后的圖像進行自適應分割。
圖像直方圖能描述原始圖像的灰度層次,從而確定不同灰度區域。一個區域類通常對應直方圖中的一個峰,但直方圖中的每個峰不一定都對應一個區域類,可能從屬于鄰近的一個峰。在濾波圖像中,背景像素一般在直方圖中占有大部分的亮度值,而噪聲像素和目標點稀疏地分布在高亮區域。因此,在濾波后圖像的直方圖中,常出現波谷,波谷的深度被稱為視覺對比度。若按一般的門限選取方法,將視覺對比度最大的位置設為分割門限,則不一定能正確地將目標與背景分離,因為此時門限過高,目標就會丟失;門限過低,又會造成分割后的可能目標點過多,影響后續處理的速度。因而有必要確定對應于應分割區域類的峰(如用直方圖)[4]。首先對直方圖進行平滑,求直方圖一階差分,找到其由正至負的過零點,然后確定初始的區域類數,再根據以下準則判斷獨立峰:有一定的灰度范圍;應有一定的面積(盡可能排除噪聲點);有一定的峰谷比。
依據上述準則確定獨立峰,也就確定了分割的門限。對可能是目標的點,保留灰度值,其余點的灰度值為零。通過門限分割消除一些不可能為目標的孤立噪聲點和大面積的連續區域,此時所得區域中有真實的目標點和少數的噪聲點,以及少數的亮背景區域,形成一個去除部分背景干擾和弱噪聲的目標圖像序列。在后續處理中,利用時域多幀關聯檢測運動的連續性,對該圖像序列可檢測出目標經過的像素點。
2 基于形態學算子的目標檢測
為比較算法的性能,本文用基于形態學算子的目標檢測算法對復雜背景中的紅外弱小目標進行檢測。
圖像形態學運算中,“腐蝕”運算的作用是消除物體邊界點,而“膨脹”算法是“腐蝕”的對偶運算,可以說是一種“包裝”運算,即在原圖像的外面“包”上一層。其實質是將結構元素與原圖像“合并”。假設結構元素在原圖像上移動,若原圖像中無結構元素中的像素點,則在原圖像中按結構元素添加像素點,故圖像的膨脹運算會使原圖像變大。數學形態學的其他運算均由“腐蝕”和“膨脹”兩個基本運算組合而成,其中最重要的是“灰度開”和“灰度閉”運算。前者先進行腐蝕運算,再進行膨脹運算;后者先進行膨脹運算,再進行腐蝕運算。
設f(x,y),b(x,y)為二維離散空間F,G上的2個離散函數,其中f(x,y)為灰度圖像,b(x,y)為結構元素,則f(x,y)關于b(x,y)的形態變換如下:
a)膨脹
b)腐蝕

c)開運算

d)閉運算

式中:Db為b(x,y)的定義域。
開運算有消除灰度中小于結構元素的“突起”或“山峰”的作用,而閉運算作用相反。因此,選擇合適的結構元素,用灰度開運算可將圖像中的點目標和孤立噪聲點消除,實現背景預測。如將輸入圖像減去對其灰度開的結果,所得就是灰度圖象中尺寸小于結構元素的高亮度的點目標、孤立噪聲點及少數高梯度背景邊角。在形態學中,上述操作即為Top-Hat算法,記為

經Top-Hat法運算后,圖像中的目標點由于其在小鄰域內對比度高,可用圖像自適應分割算法對目標點作標記,一些鄰域內對比度較高的干擾點同時也會被標記,這些需要利用多幀中目標特征的不變性進行判斷。
3 實驗
為檢驗算法的有效性,本文對海、空背景的紅外圖像進行小目標檢測實驗,時域方差濾波和基于形態學算子濾波,以及最終目標檢測結果分別如圖1~2所示。由圖可知:用最大中值濾波與時域方差濾波組合不僅能去除平滑背景的影響,提高信雜比,而且可較好地濾除電磁干擾噪聲,降低在時域檢測算法中的虛警率。此處,中值濾波模板選擇N=2。在時域方差濾波結果圖中,由于目標能量的多幀積累,有效抑制高頻噪聲干擾。兩種圖像均能獲得較好的目標識別結果。
為評價時域濾波和形態學濾波算法的背景抑制和去噪性能,定義信雜比和信噪比分別為
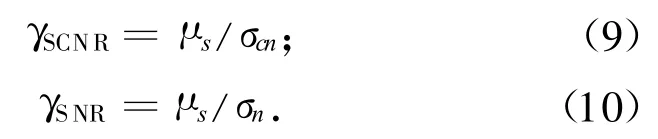
式中:μs為目標亮度均值;σcn,σn分別為圖像背景與噪聲的標準差及標準差[3]。定義濾波后信雜比的增益為

式中:下標out,in分別表示輸出和輸入。因小目標在圖像中所占的尺寸比例非常小,故認為有目標的圖像標準差與無目標的圖像標準差相同。時域方差濾波和形態學濾波算法處理前后原始圖像和濾波圖像的信噪比和信雜比見表1。
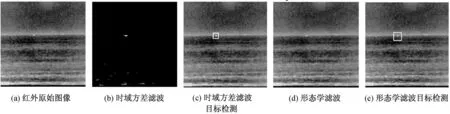
圖1 海背景小目標檢測Fig.1 Small target detection in sea background
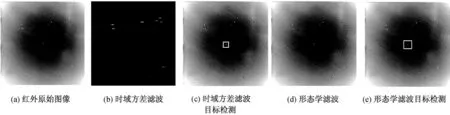
圖2 空背景小目標檢測Fig.2 Small target detection in sky background

表1 時域方差濾波前后圖像的信噪比和信雜比Tab.1 Signal to noiseration and signal to clutter before and after variance of time-domain filtering
4 結束語
綜合時域與空域信息,本文研究了復雜背景中紅外圖像序列中弱小目標識別技術,對在兩種不同背景中獲得的紅外圖像進行了基于時域濾波與形態學算子濾波算法的性能驗證和比較。實驗結果表明兩種算法均能正確檢測出目標,本文的最大中值濾波與時域濾波算法組合能更有效地增強圖像的信噪比。在海天背景中的弱小目標檢測中,因海雜波的邊緣點的亮度和運動特性與運動目標相似,不易與小目標區分,識別概率低于空背景中的點目標檢測,為此還需要后續研究。
[1]許 彬,鄭 鏈,王永學,等.紅外序列圖像小目標檢測與跟蹤技術綜述[J].紅外與激光工程,2004,33(5):482-487.
[2]SILVERMAN J,CAEFER CE,DISALVO S,et al.Temporal filtering for point target detection in staring IR imagery:II.recursive variance filter[C]//Proc SPIE Conference on Signal and Data Processing of Small Targets,[s.l.]:[s.n.],1998,3373:44-53.
[3]SUN X C,ZHANG T X,LI M.Moving point target detection using temporal variance filter in IR imagery[C]//Proc SPIE Conference on Signal and Data Processing of Small Targets,[s.l.]:[s.n.],2007,67861Z-1.
[4]袁志偉.圖像分割和目標識別的算法研究[D].長沙:長沙國防科學技術大學,1992.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12