壓差式矢量水聽器定向系統
2012-10-20 06:58:42王二慶
艦船科學技術 2012年12期
關鍵詞:信號
楊 奮,王二慶
(中國人民解放軍91388部隊,湛江524022)
0 引言
深水炸彈是一種投射式攻擊武器,自身沒有動力,入水后靠自身重力下沉,是對抗水下目標的一種有效武器。若在深彈中裝入測向系統和舵機,使深彈在下沉過程中不斷測量目標方位并調整舵機,使深彈靠近目標,在最近距離上引爆,將有效地提高命中概率[1]。四元壓差式矢量水聽器具有較小的尺寸,能夠同時測量空間一點處的質點振速的2個正交分量和聲壓分量,具有抗各向同性噪聲干擾的能力[2-3]。理論證明,利用聲壓和振速聯合處理方法可以得到4.8 dB指向性增益[4]。在深水炸彈中,利用四元壓差式矢量水聽器設計定向系統,可提高深水炸彈的作戰效能。
1 原理
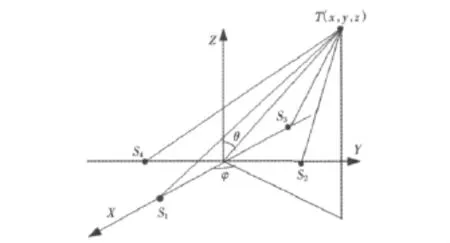
圖1 目標與水聽器位置關系圖Fig.1 Position of target and hydrophones
系統采用四元壓差式矢量水聽器,如圖1所示。水聽器的4個等效陣元分別為S1,S2,S3和S4,陣的中心為原點,4個陣元的坐標分別為S1(r,0,0),S2(0,r,0),S3(-r,0,0)和 S4(0,-r,0);目標的位置坐標為(x,y,z),入射波系數為K,聲壓為P0,俯仰角為θ,方位角為φ;4個等效陣元接收到的聲壓信號分別為P1,P2,P3和P4,4路聲壓信號的和為P,X軸向振速為Vx,Y軸向振速為Vy。
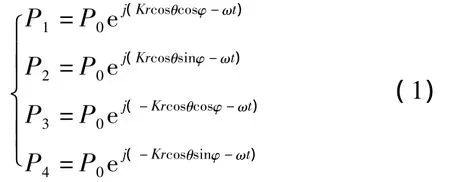
記A=K*r,當入射波被看作是沒有衰減的平面波時,不失一般性,設P0=1,考慮到工程實現,可以用壓差代替同方向上的振速[2],則有:
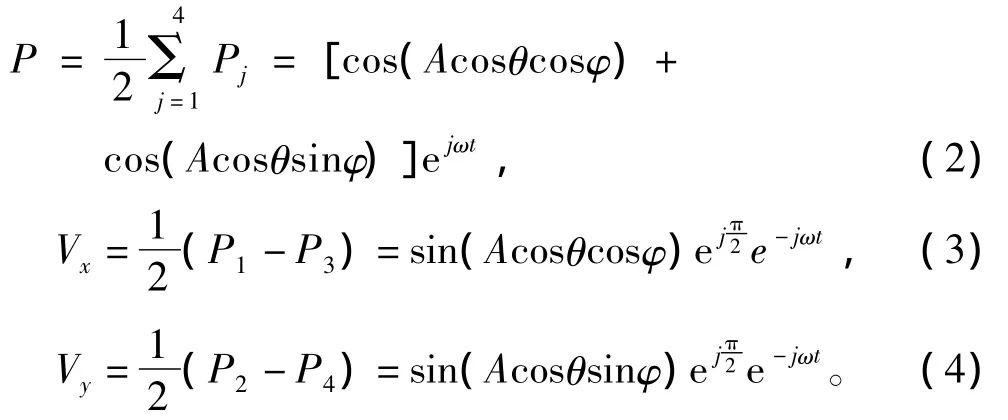
將聲壓信號P做90°相移得到P';再分別與X軸向和Y軸向上的振速響應Vx和Vy做相關和時間積累平均,時間長度為T,分別得到水平和垂直軸向上的平均聲強流k1和k2。此時,可根據k1,k2及P’這3路信號聯合計算出目標所在的方位角。

由式(6)和式(7)可得:

故當f*r/C<<1時,式(8)可表示為

做反正切運算,解算出目標方位角,再根據k1和k2的符號確定目標所在的象限,即

2 仿真實驗
用信號源產生信號,經4路移相電路產生仿真矢量水聽器的4路信號送到AD模塊轉化為數字信號,DSP模塊對4路輸入信號進行方位角計算,并把計算結果通過顯示接口進行實時顯示,實驗原理如圖2所示。
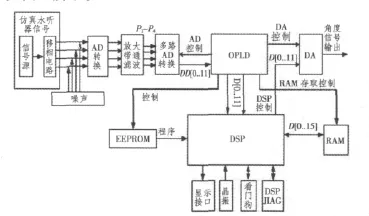
圖2 實驗原理框圖Fig.2 Block diagram of the simulation experiment
采樣率為30 kHz,采樣點數為1 024點時,系統完成1次AD采樣需要33 ms。用匯編語言實現實數FFT優化算法,僅需248 499個時鐘周期,采用100 MHz時鐘時,1次FFT計算約需2.5 ms。DSP模塊完成1次方位信息的計算需要60 ms。因為在DSP模塊進行運算的同時就開始了下一批數據的AD采樣,所以系統總的運算時間略微超過60 ms。
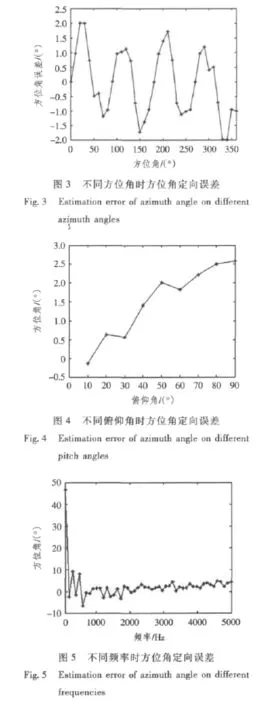
實驗是在理想信號源情況下完成的。用3 kHz單頻信號作聲源,通過4通道移相電路產生模擬的水聽器輸出信號,設置水聽器陣尺寸D為0.16 m,聲速C為1 500 m,采樣率fs為30 000 Hz。在俯仰角為40°,方位角在0~360°變化時,由DSP計算方位角,其誤差曲線如圖3所示。方位角均方根誤差為 1.08°。
設置水聽器陣尺寸為0.16 m,方位角為30°,俯仰角為40°,聲源為3 kHz的單頻信號,采樣頻率從10 kHz變化到40 kHz時,DSP計算方位角,其誤差曲線如圖6所示。方位角均方根誤差為0.22°。
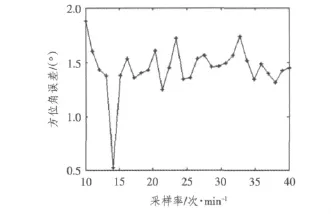
圖6 不同采樣頻率時方位角定向誤差Fig.6 Estimation error of azimuth angle on different sampling frequencies
設置方位角為 30°,俯仰角為 40°,聲源為3 kHz的單頻信號,采樣率為30 kHz,水聽器陣尺寸從0.1 m變化到0.3 m,其定向誤差曲線如圖7所示。方位角均方根誤差為0.76°。
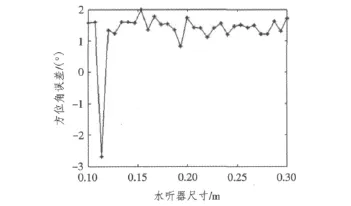
圖7 不同水聽器陣尺寸時方位角定向誤差Fig.7 Estimation error of azimuth angle on different array sizes
設置水聽器陣尺寸為0.16 m,方位角為30°,俯仰角為40°,聲源為3 kHz的單頻信號,采樣率為30 kHz,在移相之后給4路信號分別加入噪聲,使信噪比從-10 dB變化到10 dB時,DSP計算方位角,其誤差曲線如圖8所示。
方位角誤差曲線呈有規律的折線,這是因為在算法推導過程中引入了近似條件fr/c<<1。這個近似造成系統方位角的定向誤差信號頻率與水聽器陣尺寸有關。
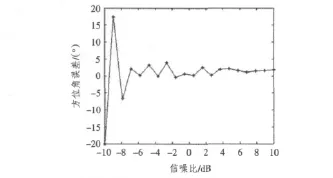
圖8 不同信噪比時方位角定向誤差Fig.8 Estimation error of azimuth angle on different SNR
3 結語
壓差式矢量水聽器定向系統在低頻段具有小于2°方位角定向誤差,完成一次方位計算需要60 ms,該硬件系統還具有體積小的特點。該研究的軟硬件系統和算法可以應用到智能深水炸彈中,也可用于相關的水下目標被動聲定向。
[1]劉勛,相敬林,羅建,等.基于聲強向量法和聲壓梯度法的水中目標定向[J].兵工學報,2001,22(1):90-94.LIU Xun,XIANG Jing-lin,LUO Jian,et al.Determination of bearings of underwater objects based on acoustic intensity and acoustic pressure gradient[J].Acta Armamentarii,2001,22(1):90-94.
[2]HAWKES M,NEHORAI A.Wideband source location using a distributed acoustic vector-sensor array[J].IEEE Trans,Signal Processing,2000,48(11):2981-2993.
[3]張靜遠,袁志勇.懸浮式深彈的被動測距技術[J].海軍工程大學學報,2003,15(4):36-38.ZHANG Jing-yuan,YUAN Zhi-yong.The passive ranging technology of moored depth charge[J].Journal of Naval University of Engineering,2003,15(4):36-38.
[4]陳華偉,趙俊渭,蔡宗義,等.兩種聲學陣列的定向精度分析與仿真[J].聲學與電子工程,2001(3):6-11.
[5]趙俊渭,陳華偉,李金明.基于矢量水聽器的被動聲制導系統的研究[J].哈爾濱工程大學學報,2004,25(1):25-29.ZHAO Jun-wei,CHEN Hua-wei,LI Jin-ming.Research on passive acoustics-guidance system based on vector hydrophones[J].Journal of Harbin Engineering University,2004,25(1):25-29.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06