NPC三電平逆變器供電的永磁同步電動機伺服系統
2012-10-31 06:53:30姜衛東楊柏旺佘陽陽吳志清
微特電機 2012年10期
姜衛東,楊柏旺,佘陽陽,吳志清
(合肥工業大學,安徽合肥 230009)
0 引 言
自從三電平逆變器結構[1]被提出以來,已經被廣泛應用于電網無功補償、柔性交流輸電和高壓交流電動機傳動等多個領域[2]。三電平逆變器與傳統的兩電平逆變器相比,具有以下優點[2-3]:1)控制方式靈活;2)單個功率管上承擔的電壓是直流側電壓的一半;3)當開關頻率相同時,輸出的電壓諧波含量低;4)開關管的開關損耗有所降低。三電平全橋逆變器在穩態運行時,中點電壓應為母線電壓的一半;同時中點電壓會產生兩種狀況:1)中點電位偏移會增加功率器件的電壓應力;2)中點電位出現低頻振蕩會增加逆變器輸出的低次諧波。
中點電位的平衡一般可作采用:1)多路獨立直流源[4];2)額外的變換器向逆變器中點抽取或注入電荷[5];3)將三相進線中性點和電容的中點連接[6];4)合理選擇矢量的順序并按照一定的規則安排矢量作用時間,該方法已被眾多文獻進行廣泛的討論。而很少有論文引入零序電壓注入法和電容電壓前饋控制法。
目前,永磁同步電動機的變頻調速控制采用空間矢量控制技術,其中以氣隙磁場定向為主,而且主要采用傳統的兩電平逆變器供電[7]。采用NPC三電平逆變器供電的永磁同步電動機伺服系統,不僅逆變器輸出電壓諧波含量大幅度減少,而且電動機轉矩脈動小、電流畸變也小。本文為了控制中點電位平衡,在SVPWM控制算法的基礎上,引入了零序電壓注入法以及電容電壓前饋控制。
1 永磁同步電動機伺服系統的矢量控制
為了便于分析,在建立永磁同步電動機的數學模型時應做如下假設[8]:1)忽略定子、轉子鐵心磁阻,不考慮磁滯和渦流損耗;2)永磁材料內部的磁導率與空氣相同,永磁體的電導率為零;3)三相繞組產生的電樞反應磁場和永磁體產生的勵磁磁場在氣隙中都是正弦分布;4)電動機處于穩態運行時,相繞組產生的感應電動勢波形為正弦波;5)不考慮溫度及頻率對參數的影響。
永磁同步電動機的定子磁鏈矢量、電壓矢量和電磁轉矩矢量方程可寫為:

式中:ψs為定子磁鏈矢量;Lsσ為相繞組的漏電感;Lm為等效勵磁電感;is為定子電流矢量;ψf為轉子磁鏈矢量;Lsσis+Lmis為電樞磁鏈矢量,與電樞磁場相對應;us為定子電壓矢量;Rs為相繞組電阻;ωs為電動機角頻率;Ls為同步電感,Ls=Lsσ+Lm;Te為電動機電磁轉矩;p0為電動機極對數;β為轉矩角。
在分析永磁同步電動機數學模型的基礎上,可建立永磁同步電動機的基于轉子磁場定向的矢量控制系統模型,整體的控制框圖如圖1所示。

圖1 永磁同步電動機系統控制框圖
系統采用雙閉環控制方案(轉速環和電流環)。檢測逆變器輸出A、B兩相相電流,經過3S/2S變換和2S/2R變換,得到id、iq。檢測轉子位置,采用M/T法測量電動機轉速(低速時采用T法,高速時采用M法),并作為轉速環的反饋值。轉速環的輸入是給定轉速與實際轉速的差值,經過轉速PI調節器后輸出為給定。iq電流環PI調節器的輸入為給定與iq的差值;輸出為uq;id電流環PI調節器的輸入為給定與id的差值;輸出為ud。
2 NPC三電平逆變器SVPWM策略
2.1 三電平逆變器的SVPWM策略

圖2 NPC三電平逆變器的結構圖
圖2為NPC三電平逆變器的電路結構圖。當S1、S2導通時,逆變器A相輸出電平為+,記為p;當S2、S3導通時,逆變器A相輸出電平為0,記為0;當S3、S4導通時,逆變器A相輸出電平為-,記為n。把三相電壓值代入以下電壓空間矢量的計算式:

可以得到如圖3所示的空間矢量圖。因為每相電壓有3種不同的輸出(若采用有序數組表示,例如[nnp]、[n0p]等),每一個矢量對應一種輸出,總共有27個矢量,其中獨立的矢量有19個,冗余矢量有8個。

圖3 三電平逆變器的矢量圖
若矢量合成按照相鄰三矢量原則,矢量合成應滿足如下伏秒平衡原理。


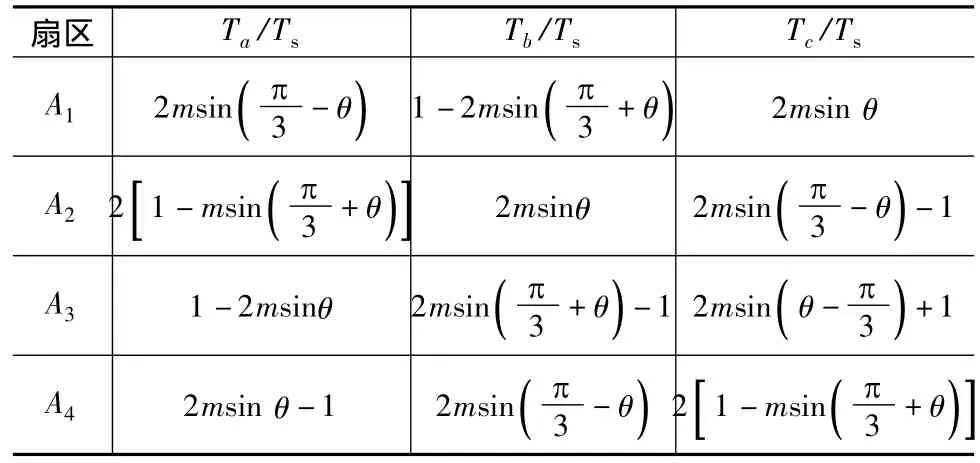
表1 扇區A內的矢量作用時間
2.2 中點電壓平衡策略
根據矢量的模長可以將矢量為零矢量(ZVV)、小矢量(SVV)、中矢量(MVV)和大矢量(LVV),按照對中點電位的作用,小矢量又被分為上小矢量(USVV)和下小矢量(LSVV)、如表2 所示[9]。
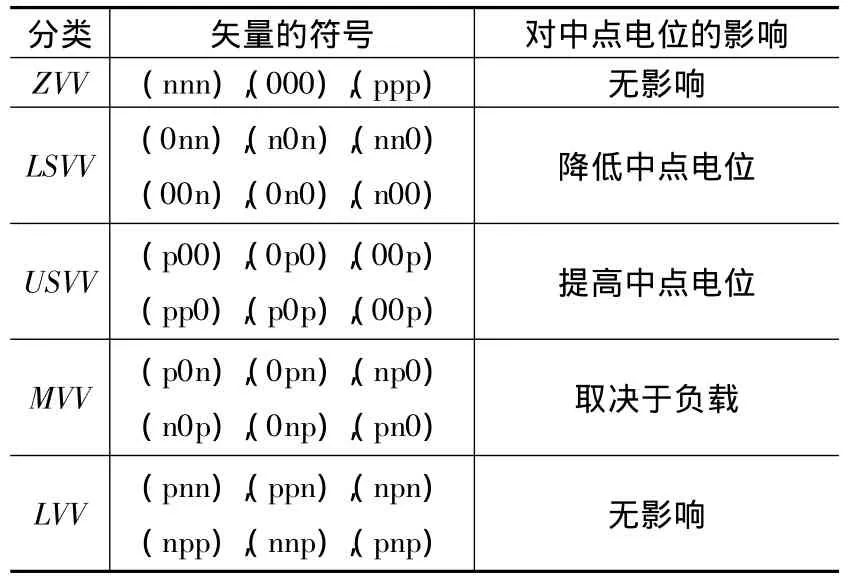
表2 NPC三電平逆變器的矢量分類
本文通過對冗余矢量的作用時間進行調整,來控制中點電壓,即改善處于同一點的2個SVV的分配作用時間對中點電壓進行調控;同時引入電容電壓前饋控制,實現對中點電壓進行實時控制。
如圖1所示,檢測直流側上下電容電壓兩者差值作為中點電壓PI調節器的輸入,輸出即為所需注入的零序電壓分量ucom。在SVPWM調制中,ud、uq經過反Clarke變換和反Park變換并注入零序電壓分量ucom后得到ua、ub和uc;再經過引入電容電壓前饋的空間矢量調制,輸出PWM信號,通過驅動電路去驅動逆變器的功率管。SVPWM調制注入了零序電壓并引入了電容電壓前饋控制,防止在中點電位不平衡時逆變器輸出電壓畸變,減小輸出電壓諧波。
3 實驗結果
搭建NPC三電平逆變器的實驗平臺。采用FreeScaleMC56F8345 DSP控制器完成矢量的作用時間計算和系統采樣,驅動信號的分配部分采用Free-ScaleMC56F8013 DSP。
在實驗中,逆變器的器件型號或參數如表3所示。電動機的詳細參數如表4所示。環路控制PI調節器的KP和Ki參數如表5所示。圖4為整個控制系統實物圖,電動機通過測功機加5 N·m恒轉矩負載。

表3 逆變器的參數

表4 永磁同步電動機的詳細參數

表5 PI調節器的環路控制參數

圖4 控制系統實物圖
圖5給出了電動機空載1500 r/min、5 N·m負載1500 r/min、空載300 r/min和5 N·m負載300 r/min穩定運行時直流母線電容電壓、相電流、線電壓波形。電流、電壓直接通過Agilent示波器MSOX3014A測量;轉速、轉矩可用Magtrol公司的電動機動態轉速轉矩測試儀測量。
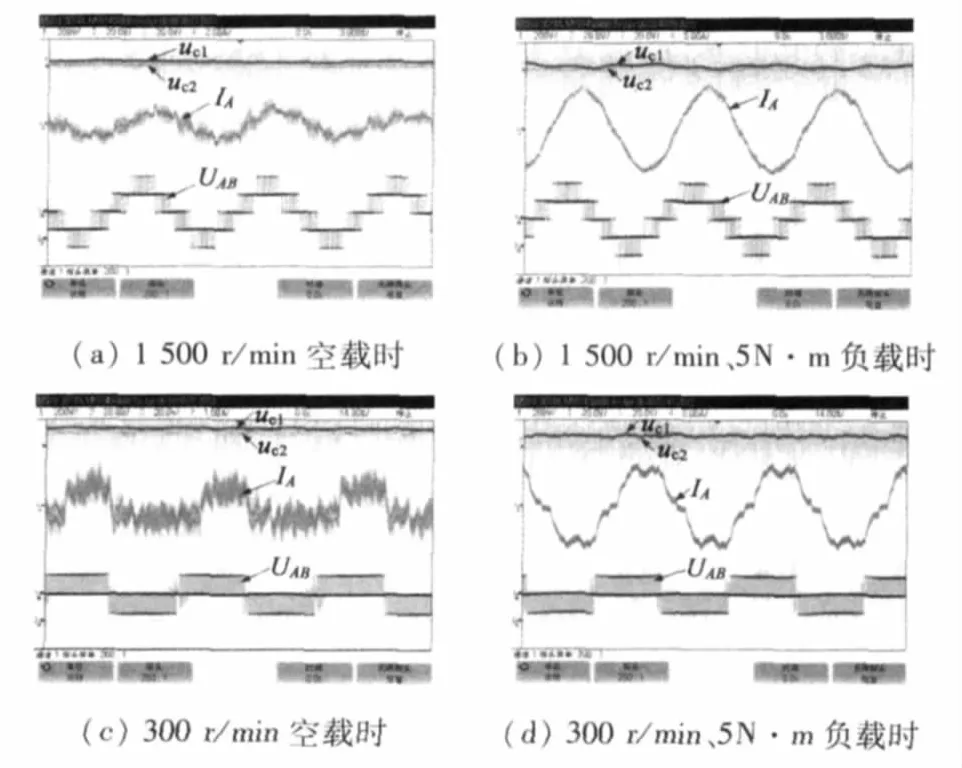
圖5 不同材料的電機性能對比
由圖5(a)能看出,電動機空載高速運轉時,中點電壓不發生振蕩,只存在微小的偏移;輸出電流波形和電壓波形諧波含量低,電動機轉矩脈動小。從圖5(b)可以看出,在電動機帶載高速運轉時中點電壓出現輸出基頻的3倍頻振蕩,這種情況的發生是由于在較大調制度時,三電平逆變器的固有規律造成的。所以電動機進入高速穩態運行后,通過注入零序分量,SVPWM控制算法的輸出電流將包含有低次諧波。從圖5(c)可以看出,電動機在空載低速運轉時,中點電壓偏移小,能夠維持平衡;但是電流波形畸變較大。從圖5(d)可以看出,在電動機帶載低速運轉時,中點電壓出現了高頻振蕩現象;這是三電平逆變器在較低的調制度時的中點電位出現的固有規律。所以電動機在低速運行時,進入穩態運行后,通過注入零序分量的SVPWM控制算法來平衡中點電位,將會使輸出電流包含有高次諧波,且諧波含量較大。系統采用電容電壓前饋和注入零序電壓分量的SVPWM控制算法,有效地控制了中點電壓的偏移,達到電動機可靠調速的性能。
4 結 語
本文分析了三相永磁同步電動機的矢量方程,并建立其矢量控制系統。分析了三電平逆變器SVPWM控制算法的空間矢量,在此基礎上,提出注入零序分量和電容電壓前饋的控制算法。實驗驗證了該改進算法的可行性,可以看出該算法有效地控制了中點電位的平衡;系統具有良好的穩態動態性能,達到了控制目的。電動機轉速較高時,電動機的感應電動勢較高,逆變器的調制度較高,逆變器輸出線電壓為典型的三電平波形,如圖5(b)所示。電動機轉速較低時,電動機的感應電動勢較低,逆變器的調制度較低,逆變器輸出線電壓類似于兩電平的波形,如圖5(d)所示。
[1]Nabea A,Takahashi I,Akag H I.A new neutral- point- clamped PWM inverter[J].IEEE Transactions on Industry Applications,1981,IA -17(5):518-523.
[2]Liu Fengjun.Multi- level inverter and its application[M].Machinery Industry Press,2007:2 -5,8 -9.
[3]Jiang Weidong,Wang Qunjing,Shi Xiao - feng,et al.Low Frequency oscillation of neutral Point voltage of neutral-pointclamped three - level VSI under SVPWM control[J].Proceedings of the CSEE,2008,28:1 -2.
[4]Yazdani A,Iravani R A.Generalized state - space averaged model of the three-level NPC converter for systematic DC-voltagebalancer and current- controller design[J].IEEE Transactions on Power Delivery,2005,20(2):1105 - 1114.
[5]Lee D H,Lee S R,Lee F C.An analysis of midpoint balance for the neutral- point- clamped three - level VSI[C]//IEEE Power E-lectronics Specialists Conference.Fukuoka,1998,1:193 -199.
[6]Lim S K,Kim J H,Nam K.A DC - link voltage balancing algorithm for 3 - level converter using the zero sequence current[C]//IEEE Power Electronics Specialists Conference.Charleston,1999,2:1083-1088.
[7]Qiao Mingzhong,Zhang Xiaofeng,Li Kuishu.The direct torque control of synchronous motor based on the three - level inverter[J].Journal of Wuhan University of Technology(Tran sportation Science& Engineer ing),2006,30(1):1-2.
[8]Wang Chengyuan,Xia Jiakuan,Sun Yibiao.Modern control technlgue of electric machines[M].China machine press.2008:107 -110.
[9]Jiang Weidong,Wang Qunjing,Chen Quan,et al.SVPWM algorithm for NPC three-level VSI considering unbalance neutral point voltage[J].Proceedings of the CSEE,2008,28:2-3.