基于PIC單片機的步進電動機控制系統設計
2012-10-31 06:53:36童修偉
微特電機 2012年10期
關鍵詞:單片機
童修偉
(菏澤學院,山東菏澤 274000)
0 引 言
步進電動機是將電脈沖信號轉變為角位移的開環控制執行機構。由步進電動機的實際矩頻特性和速度頻率特性可得,轉子的速度與脈沖的頻率成正比關系,脈沖數決定轉子的起停,而不受負載變化的影響,非常易于單片機控制。并且其具有電路廉價、跟隨性良好、可靠性高等優點,使得步進電動機在一些對速度、位置控制精度要求較高的領域得到了廣泛的應用。
在步進電動機的實際運行過程中,由加速度頻率特性可得,如果運行頻率大于起動頻率時,步進電動機會發生失步現象。同樣,當運行頻率突然停止時,步進電動機會由于慣性作用產生過沖現象,造成位置不精確。如果頻率過低,步進電動機的速度又會太慢。所以加減速過程控制的好壞直接決定了步進電動機的控制精度。在不發生失步和過沖現象的前提下,使步進電動機從一個位置快速精確地移動到另一個位置是本文要解決的關鍵問題。本文采用對S型加減速曲線微分化的方法。微分化(線性化)后將得到一系列的不同速度,而后根據不同的速度值和時間間隔求出相對應的轉速序列,而后將其轉化成一系列的常數值,存儲在數組中。在程序運行中,使用類似查表的方法從數組中調出相應的每一段的時間常數,以提高執行速度。而步進電動機的點位控制則是由二個參數來完成的,達到了對步進電動機精確控制的效果。
1 硬件分析
步進電動機驅動電源如圖1所示。

圖1 步進電動機驅動電源方框圖
步進電動機需要一個專門的驅動電源,驅動電源控制的好壞直接決定步進電動機運行的好壞。在驅動電源中,只需控制其中的脈沖分配器,因為其他部分只需設計硬件即可達到相應的要求。在這里有二種方法實現脈沖分配:軟件法是用單片機的PWM口不停地產生PWM波,這樣會占用大量的CPU時間,而且運行速度較慢。因此相對于軟件法,硬件法更具有優勢。所謂硬件法就是用脈沖分配器芯片實現換相控制。由于采用了脈沖分配器,單片機只需利用其CCP模塊中的脈寬調制模式發出脈沖進行速度和轉向的控制,在接下來的脈沖分配過程中,脈沖分配器主要把脈沖信號加在脈沖放大器上,因此大大提高了運行速度。本文采用硬件法。在眾多的芯片中選擇8713集成電路芯片。8713脈沖分配器與PIC16F877的接口實例如圖2所示。

圖2 8713脈沖分配器與PIC16F877接口電路圖
2 步進電動機的速度控制
2.1 S型加減速曲線的分析
本文是在對S型加減速曲線線性化(離散化)的基礎上,得到定時常數序列,進而利用查表的方法重裝定時常數。S型升降頻曲線線性化圖如圖3所示。
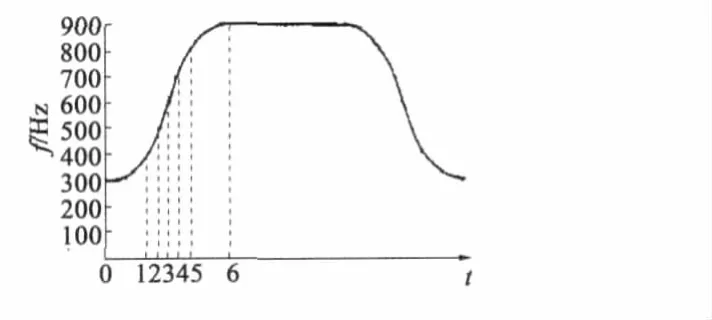
圖3 S型升降頻曲線的線性圖
分析圖3可知,線性化,即是對S型升降頻曲線進行微分化,由微分知識可得,每一個速度微分階段都可以看成平滑直線。每一個微分階段所持續的時間即可用下列公式表示:
式中:x為速度級數;y為比例常數。
2.2 針對線性化的S型加減速曲線的程序設計
設計加減速總步數為30步,步進電動機在加速過程中一直對這個總步數進行遞減操作,當減至為零時表示加速過程完畢,轉入恒速過程。同樣在此過程中一直對這個總步數遞減,減至為零時表示恒速過程結束,進入減速階段。減速過程與加速過程相反。
利用查表方法設計的軟件流程圖如圖4所示。

圖4 S型加減速曲線的流程圖
3 步進電動機的位置控制
3.1 步進電動機的點位分析
步進電動機的一大優點就是位置控制,因為其位置與脈沖數具有一一對應的線性關系,位置控制不需反饋只需單片機提供的脈沖個數就能準確定位,而且定位精度高。在本控制系統里主要采用的是參數法,通過設定二個參數來控制步進電動機的位置。第一個參數是我們設定的初始值,即步進電動機當前的具體位置。第二個參數我們稱之為相對參數,主要設定從當前位置移動到目標位置的距離。在此控制系統中主要采用鍵盤程序將這個位置折算成電機的步數。只需設定這二個參數就可以實現位置的精確控制。
3.2 基于2個位置參數(絕對位置參數和相對位置參數)的程序設計
此程序設計同樣是在圖2的硬件基礎上進行的,所有的操作都在定時器中斷程序中完成。每次中斷都改變一下RA0的狀態,即每二次中斷步進電動機才走一步。具體的程序流程圖如圖5所示。
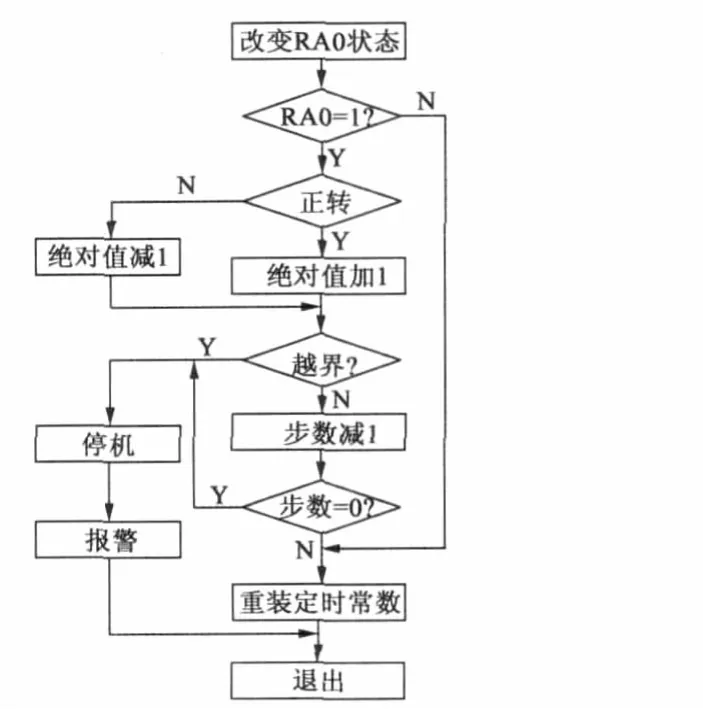
圖5 點位控制流程圖
4 實驗結果
本實驗采用的是六線四相制步進電動機,選用八拍方式對四相步進電動機控制。分別測得角度與位置數據與理論值的對比結果如表1所示。
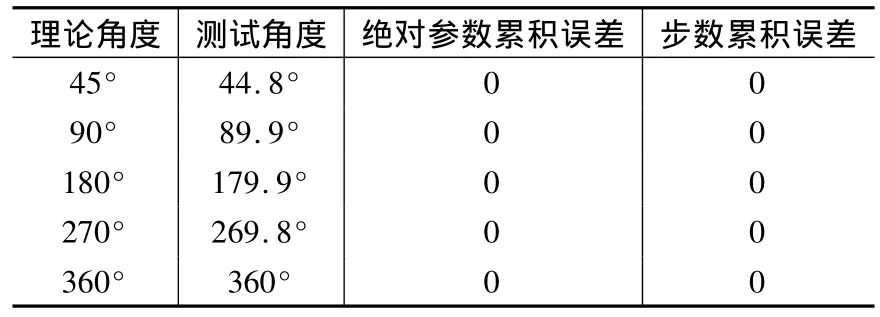
表1 實驗結果
5 結 語
本文的控制系統編程時創造性地利用了查表法、參數法,很好地解決了步進電動機在運行過程中存在的失步、過沖等現象。該控制系統的良好性能已在作品《智能循日采光系統》(該作品獲得2011年山東省機電產品創新大賽一等獎)中得到了很好的驗證。在該作品中,控制系統實現了采光板對太陽實時追蹤、精確定位的良好效果。同時該控制系統也在項目《基于太陽能電池板的立體旋轉屏》(獲得菏澤學院大學生科研訓練計劃立項)中實現了對旋轉屏速度和位置精確控制的良好效果。該控制系統還在我校實訓中心和實驗室里的數控機床上得到了廣泛的應用。經多次試驗,用C語言編寫的該控制系統實現了步進電動機在工作頻率內運行平穩、定位精度高等效果,是一款成本較低、經濟實用的控制系統。
一個好的控制系統還得具有較好的通用性和保護功能。此控制系統可以驅動多種步進電動機,并且除在程序中設計了看門狗還設計了過電流保護功能。
[1]王有緒.PIC系列單片機接口技術及應用系統設計[M].北京:北京航空航天大學出版社,2000.
[2]秦增煌.電工學[M].第7版.北京:高等教育出版社,2009.
[3]王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002.
[4]花同.步進電機升降速控制技術的研究[J].科技創新導報,2011(25):61.
[5]王建,張玉峰,李磊.步進電機加減速控制技術研究[J].工礦自動化,2006(6):65-67.
[6]譚浩強,張基溫.C語言程序設計教程[M].北京:高等教育出版社,2006.
[7]王玉琳,王強.步進電機的速度調節方法[J].電機與控制應用,2006,33(1):53 -56.
[8]常毅.基于單片機的步進機控制研究[J].制造業自動化,2011(9):16-18.
[9]張烈剽.基于單片機的高精度步進電機控制研究[D].武漢理工大學,2007.
[10]楊冬霞,范長勝.橢圓形鏡框加工中步進電機的控制研究[J].林業機械與木工設備,2010(2):31-33.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36