無刷雙饋電機的直接轉矩控制仿真
2012-10-31 06:53:34宋穎慧李玉忍牟海濤張智慧
微特電機 2012年10期
宋穎慧,李玉忍,牟海濤,張智慧
(西北工業大學,陜西西安 710129)
0 引 言
交流傳動的瞬態及穩態響應滿足“穩、準、快”要求,且具有調速范圍較寬等良好的特性。電子技術和控制技術等相關學科的快速發展,以及矢量控制和DTC的相繼提出及進一步研究完善,使得交流傳動技術已逐漸取代了直流傳動的主導地位。它具有抗干擾能力強、效率高等優點,且可實現同步、異步、發電運行和雙饋運行等多種運行方式。在大功率的變頻調速和變速恒頻控制中有著廣闊前景[2]。
1 BDFM的結構原理
無刷雙饋電機(以下簡稱BDFM)也是感應電機的一種,與普通感應電機有相似的基本結構,但又區別于普通感應電機,如圖1所示,它的定子有兩套繞組:功率繞組和與控制繞組。定子兩套繞組產生的磁場接近正弦波,并消除其余諧波。借助轉子的特殊結構,根據“極調制”原理,實現磁場耦合完成能量的傳遞[1]。
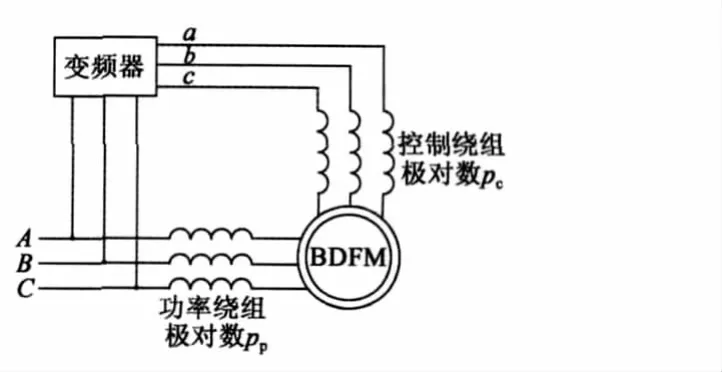
圖1 BDFM原理圖
2 BDFM的DTC原理與結構
2.1 BDFM的DTC原理
可將運行的BDFM看作一臺磁極為2(pp+pc)的感應電機,功率側繞組可看作感應電機的定子繞組,控制側繞組可相應看作轉子繞組。故其電磁轉矩公式表示如下:

式中:ψsp為功率側繞組的磁鏈;ψsc為控制側繞組的磁鏈;δ是ψsp和ψsc之間的夾角。其中功率繞組磁鏈可由下式得到:

功率側繞組的電壓損耗相對于功率側繞組電壓很小,故功率側繞組磁鏈ψsp基本不變。由式(1)可知,若保持ψsc不變,可通過控制ψsc的旋轉速度來控制磁通角δ的大小,實現轉矩控制。故可依靠控制電壓矢量usc來控制ψsc的旋轉速度,如圖2所示[6]。
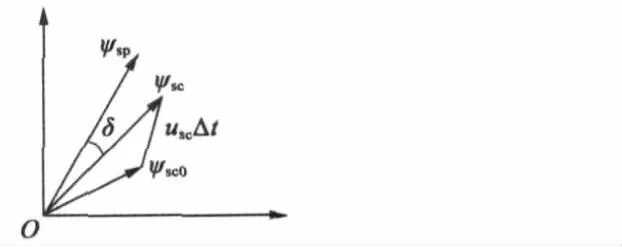
圖2 磁鏈矢量與控制繞組電壓矢量的關系
2.2 BDFM DTC系統的結構
BDFM DTC系統原理圖如圖3所示。
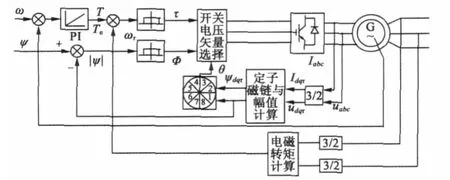
圖3 DTC系統原理框圖
控制過程如下,根據式(1)、式(2)計算出磁鏈及轉矩,兩者經過調節器得到磁鏈和轉矩誤差,與此同時判定磁鏈所在的扇區,根據三個變量值在預先設置好的開關狀態表中選擇相應的電壓空間矢量控制逆變器開關,從而控制磁鏈及轉矩,實現DTC[3]。具體參見文獻[3]。
3 建立BDFM的數學模型
BDFM的電磁關系比普通的感應電機復雜,目前國內外將BDFM的數學模型分為以下三類:網絡數學模型、電機d-q軸數學模型、同步坐標數學模型[1]。其中電機d-q模型是在網絡數學模型的基礎上發展起來的,它的直觀方便性更適合于控制系統仿真研究。本文將就d-q軸模型進行研究討論。
3.1 BDFM基本方程
根據霍爾夫定律,以雙饋電機的定子功率側繞組、控制側繞組及轉子繞組各回路電壓、電流為變量,可以得到其電壓、電流關系矩陣方程[4]:
式中:U為相電壓矩陣;I為相電流矩陣;L為自感和互感矩陣;R為相電阻矩陣;p表示微分算子。下標p代表功率側繞組、下標c代表控制側繞組、下標s代表定子側、下標r代表轉子繞組[3]。
電磁轉矩方程:
3.2 BDFM的d-q軸數學模型
通過轉換矩陣變換可以得到d-q軸數學模型矩陣[1]:

對式(4)進行變換,得:

其機械運動方程為:

式中:J為機械慣量;Kd為轉動阻尼系數;T為轉矩;ω為角速度;下標e表示電磁、下標l表示負載、下標 r表示轉子[5]。
4 BDFM DTC仿真及結果分析
本文仿真所用電機參數:額定功率PN=5000 W,額定電壓UN=380 V,額定頻率fN=50 Hz,額定轉速 nN=100 rad/s,轉動慣量 J=0.1 kg·m2,額定轉矩TN=50 N·m,電機極對數p=3,定子電阻r1=0.95 Ω,定子電感L1=94 mH,轉子等效電阻r2=1.8 Ω,轉子等效電感 L2=88 mH,勵磁電感 Lm=82 mH。仿真模型總體圖如圖4所示。
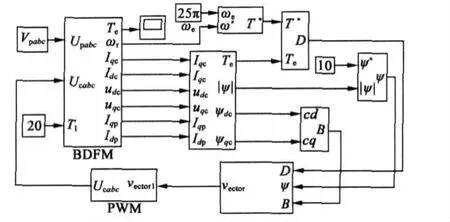
圖4 BDFM DTC仿真圖
圖5為轉子磁鏈的軌跡圖,從其軌跡可知,由于多個電壓矢量作用于磁鏈模型的每一區段,轉矩脈動較小,諧波成分降低,磁鏈軌跡近似接近圓形,改善了電機性能[7,9]。
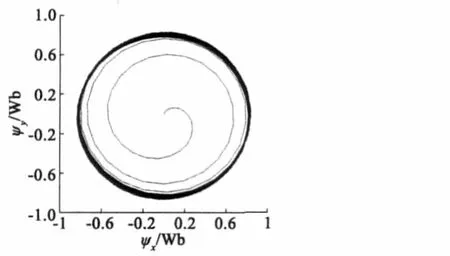
圖5 轉子磁鏈仿真結果
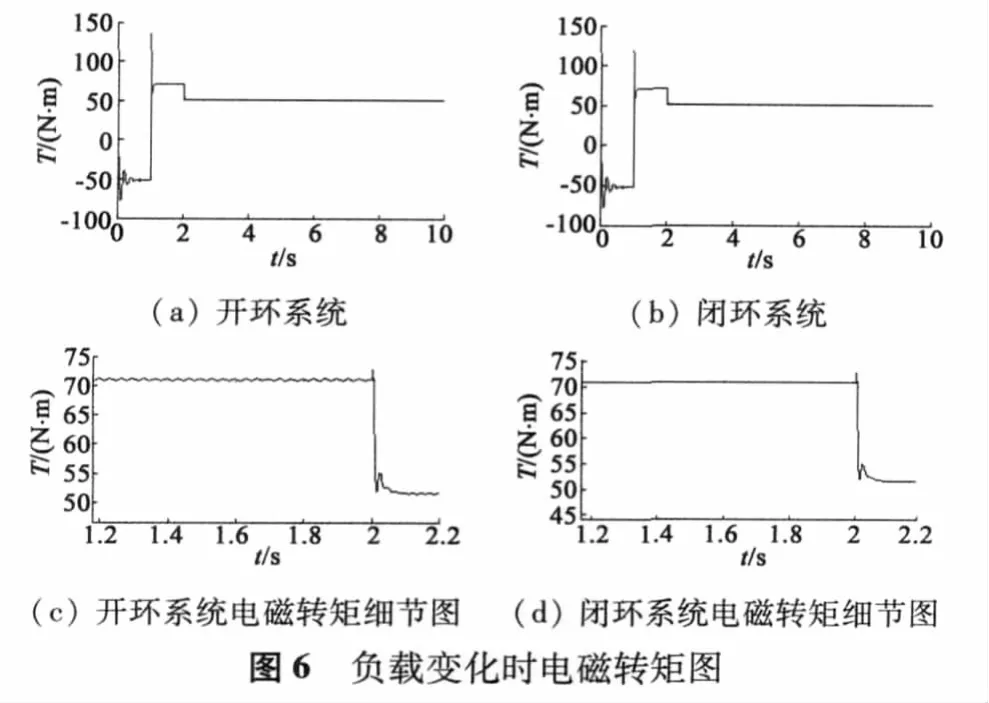
為了直觀地觀察DTC的優點,本文將開環仿真與其進行對比。圖6為負載變化時的電磁轉矩變化,從圖中可以看出,直接轉矩閉環控制時轉矩超調量很小,運行穩定,且動態響應快速[9]。
5 結 語
本文分析并在轉子坐標系下建立了BDFM的數學模型,通過對DTC理論的研究,確定了轉子磁璉定向的DTC方法。通過MATLAB/Simulink建立仿真模型,所得磁鏈近似圓形,表明電機能夠平穩運行,電機性能得到提高,對實際應用有一定的參考性。
[1]林健華.無刷雙饋電機的直接轉矩控制研究[D].廣東:廣東工業大學,2008.
[2]陽錦剛,潘再平.級聯式無刷雙饋發電機的仿真研究[J].太陽能學報,2008,29(8):1015 -1020.
[3]彭冠炎.無刷雙饋電機及其直接轉矩控制的研究[D].廣州:華南理工大學,2010.
[4]張曉峰,王曉遠,呂征宇.無刷雙饋電機調速特性的仿真和試驗研究[J].微特電機,2005(12):11-13.
[5]張洋.無刷雙饋電機及其直接轉矩控制系統的研究[D].山西:太原理工大學,2007.
[6]崔軍輝.無刷雙饋電機變頻調速系統的研究[D].內蒙古:內蒙古科技大學,2009.
[7]張喜海.無刷雙饋電機直接轉矩控制系統研究[D].成都:西南交通大學,2010.
[8]宋文華.變速恒頻雙饋發電機直接轉矩控制的研究[D].沈陽:沈陽工業大學,2005.
[9]劉曉鵬 無雙雙饋電機變頻調速系統的研究[D].太原:太原理工大學,2005.