模糊PID控制在舞臺機械設備同步中的應用
2012-11-05 07:43:24侯鵬強
演藝科技 2012年2期
侯鵬強
(成都炎興自動化工程有限公司,四川 成都 610000)
1 引言
在大型現代化舞臺表演設備中,往往需多臺電機協調運動,同時驅動車臺、升降臺等設備旋轉、水平或升降運動。從控制角度而言,多臺相同類型電機同步運動的跟蹤誤差和同步誤差將直接影響到設備運動的準確性與平穩性。實際系統由于受環境因素的影響,電機參數及負載擾動將隨時間變化,嚴重情況下將導致各軸轉速會因環境因素引起的電機參數變化、負載擾動等不可預知的因素而失去同步。多電機同步控制是一個多變量、非線性、強耦合的控制問題,研究多電機同步控制方法具有重大意義。
現代多電機同步控制,形成了以高精度的測量元件、高速運算的微控制器和高效的控制算法為核心的控制模式。目前,多電機同步控制中常用的交叉耦合控制主要有主從控制和等狀態控制兩種方式。主從控制將一臺電機的轉速輸出作為下一臺電機的設定速度,即從電機跟蹤主電機的速度變化。這種控制結構簡單易行,能有效克服因主軸速度波動引起的不同步,卻無法克服從軸速度波動引起的不同步;并且,當電機數目較多時,靠后的從電機對第一臺主電機的響應會比較緩慢,在啟動停止過程中會出現較大的同步誤差。等狀態控制采用基于同步誤差的補償控制技術,補償控制器引入了所有軸的速度信息,對每個軸形成控制量,這種控制方式能夠對任何軸的速度波動產生響應,但是會因電機的增多而使計算復雜。
模糊控制作為智能控制的一個重要分支,不需要建立精確的數學模型,而是運用模糊理論,將人的經驗知識、思維推理、控制過程的方法與策略由模糊控制器來實現;PID控制作為經典控制理論,應用已達50年之久,使用簡單,但存在一定的限制。本文將兩種控制進行融合,在舞臺同步控制系統中采用模糊PID控制,使舞臺設備中多臺相同類型電機能實現很好的同步運動,從而達到更好的舞美效果。
2 系統構成
舞臺機械控制系統采用分布式架構,主要由三層構成:控制層、管理層、執行層。控制層主要指上位機或操作臺,通過上位機或操作臺,操作人員可選擇單個設備或調出需要執行的場次,以及對設備采用的控制方式;管理層主要包含臺上集中控制器、臺下集中控制器,同時,一些特殊的控制器也屬于這一層,如聯動控制器、時序同步控制器等具備管理功能的控制器;執行層主要用于執行控制層或管理層傳來的控制命令,通過對命令的解析,完成控制功能。
設備同步控制器不能由操作員直接操作,又沒有直接面向電機類設備,故其既不屬于操作層也不屬于執行層設備,定義屬于管理層設備,如圖1所示。
設備同步控制器接收上位機或操作臺傳來的設備同步控制命令,通過對需要同步控制的設備進行解析和判斷,例如本次要求同步控制的為1、3、4號吊桿,并要求1、3、4號吊桿同步上升,此時可默認設備號最小的速度為主令速度,即1號設備,將1號設備速度設置為操作層要求的速度運行,3、4號設備將根據自身增量型編碼器返回值與1號編碼值進行比較、計算并做模糊PID調節,完成設備的同步操作。
3 同步控制器硬件設計
同步控制器主要用于與管理層和執行層設備通信,起協調作用,硬件設計相對簡單,主要外部接口為兩個Can控制器,硬件設計框圖如圖2所示。
由圖2可看出同步控制器主要分以下幾個模塊:
(1)MCU處理器
MCU采用ARM的Cortex-M3內存芯片STM32F103R8T6作數據處理和時序控制,采用芯片MAX809R進行上電復位,采用8 MHz晶振作為MCU的時鐘源,用JTAG調試接口進行調試。
(2)CAN總線模塊
2路CAN總線設計均采用CAN總線專用ESD保護器件PED1CAN進行保護。本地CAN采用STM32F103R8T6集成的CAN總線和CAN收發器TJA1050,主要用于接收管理層傳來的控制命令。另一路CAN采用外置CAN控制器MCP2515,主要用于與執行層設備進行通信,保證數據的實時性。
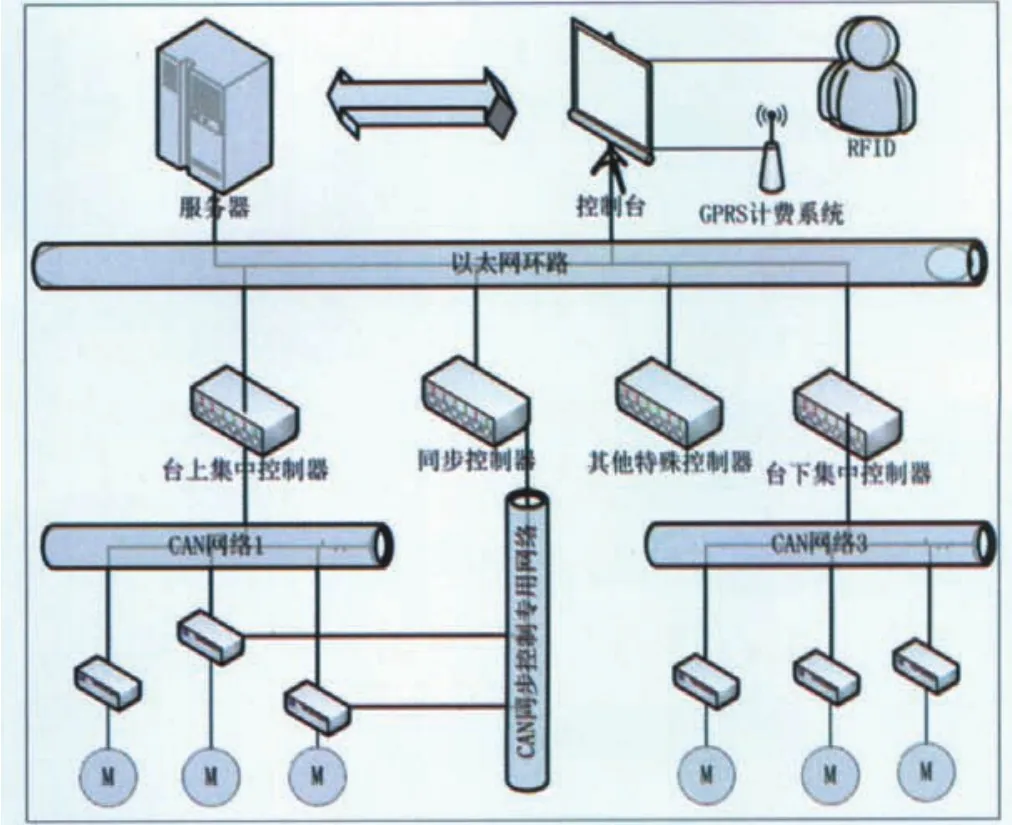
圖1 系統框圖
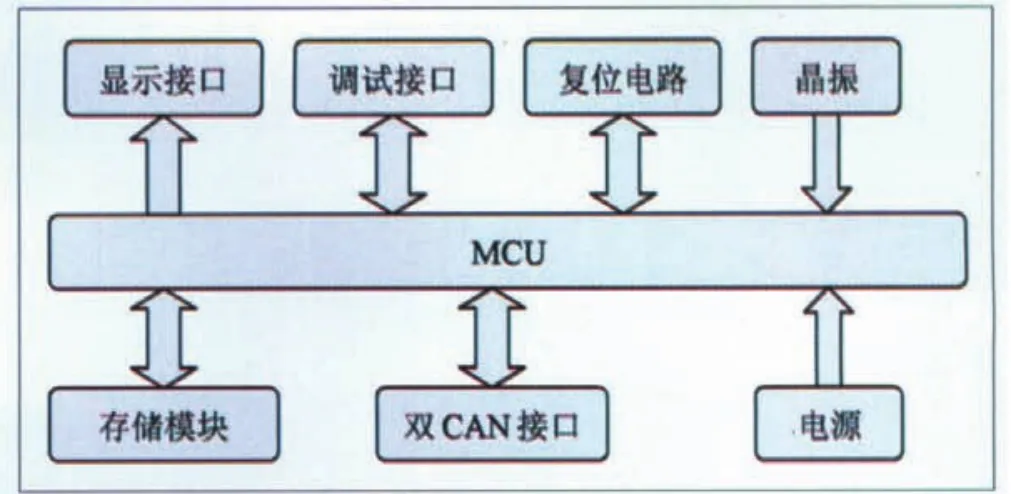
圖2 硬件設計框圖
(3)存儲模塊
采用SPI串行EEPROM AT25040作為數據存儲,主要用于存儲配置信息,如同步設備的地址等信息。
4 模糊PID控制器軟件設計
在PID控制中,比例Kp增大可以加快響應速度,減少系統穩態誤差,提高控制精度,但Kp過大會使系統產生超調,甚至導致不穩定;積分Ki作用主要是消除系統的靜態誤差,加強積分作用有利于減小系統靜差,但是過強的積分作用會使系統超調加大,甚至引起振蕩;微分Kd主要是針對具有大慣性被控對象改善其動態性能,增大微分時間有利于加快系統響應,使系統超調量減小穩定性增加,但對擾動敏感,抑制外擾能力減弱。
自適應模糊PID控制器由常規PID控制器和模糊控制器兩部分組成。模糊控制器的輸入是偏差E和偏差變化率EC,輸出是ΔKp、ΔKi、ΔKd。PID參數模糊自整定是找出ΔKp、ΔKi、ΔKd和偏差E及偏差變化率EC之間的模糊關系。在運行中通過不斷檢測E和EC,根據模糊控制原理來對3個參數進行在線修改,以滿足不同E和EC時對控制參數的不同要求,從而使被控對象達到良好的動、靜態性能,而且計算量小。模糊控制表可以通過預先的計算得到并存儲在EEPROM中,使用時直接對其查表可減少MCU的計算量。該控制器主要應用于對原有控制系統改進,使先進控制算法更具有實時性。自適應模糊PID控制器的結構如圖3所示。

圖3 自適應模糊PID控制器結構圖
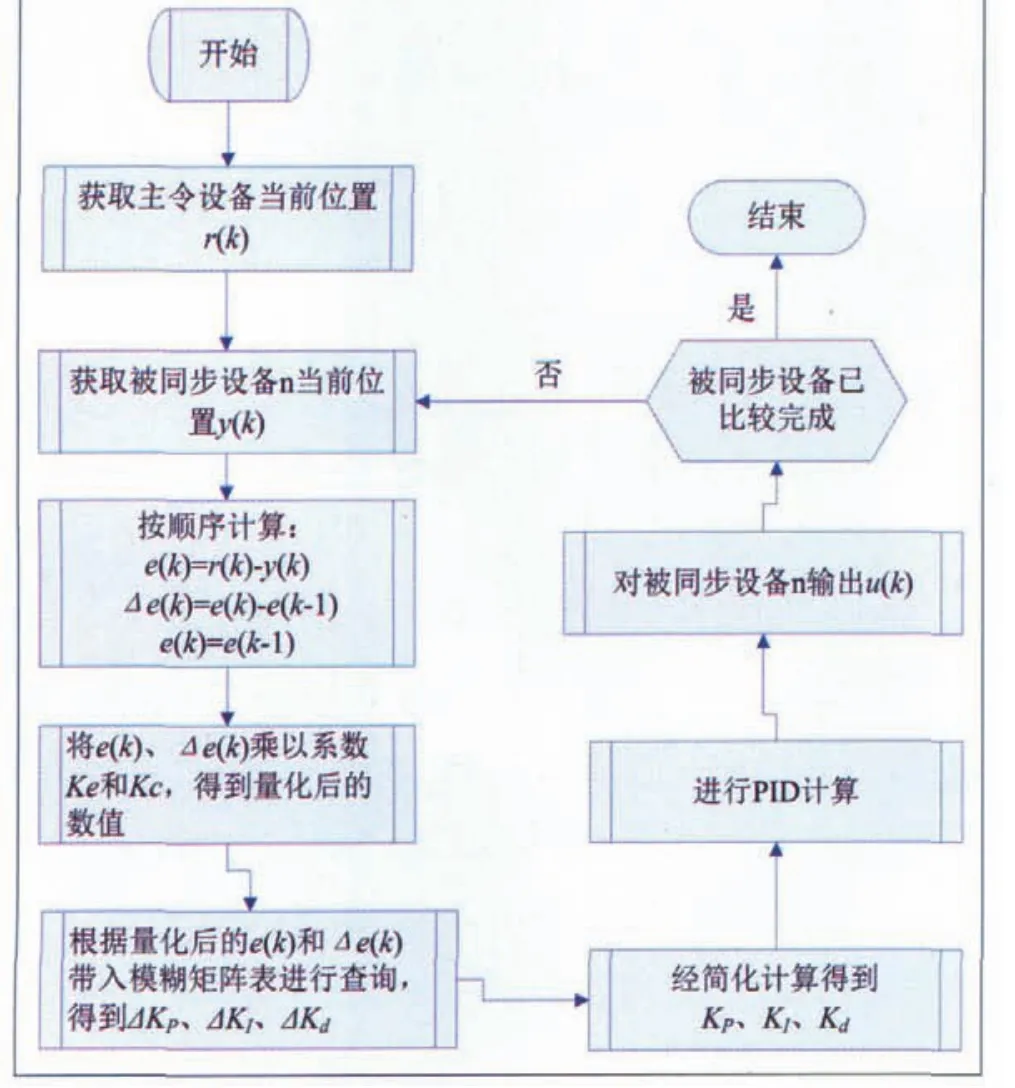
圖4 模糊算法控制流程圖
對于ΔKp、ΔKi與ΔKd的調節,分別設定調節器為FC1(此例ΔKp模糊控制器)、FC2(積分ΔKi模糊控制器)和FC3(微分ΔKd模糊控制器),這3個調節器將根據輸入偏差E和偏差變化率EC經過模糊化、模糊推理以及解模糊的過程得到控制量的增量ΔKp、ΔKi與ΔKd。
對于模糊規則的制定,結合PID 3個參數對控制過程的影響,主要遵循以下規律:
(1)在偏差的絕對值|E|比較大時,為盡快消除偏差,提高快速跟蹤能力,應該取較大的Kp和較小的Kd,同時,為了避免系統出現較大的超調,要限制積分作用,Ki取0。在|E|中等大小時,為繼續減小偏差,并防止超調過大,Kp值要減小,Ki值適中,這種情況下,Kd的取值對系統的影響較大。在|E|很小時,為消除靜差、克服超調,使系統盡快穩定,Kp的值繼續減小,Ki值不變或稍取大,同時,為防止系統在設定值附近出現振蕩,Kd的取值相當重要。
(2)當偏差與偏差變化(上一次偏差減去本次偏差)同號時,被控量是朝設定值方向變化,取消積分作用,避免積分超調及隨之而來的振蕩。當偏差與偏差變化異號時,采取變速積分,以優化控制的動態過程。
(3)偏差變化的大小表明偏差變化的速率,偏差變化Δe越大,Kp取值越小,Ki取值越大,反之亦然。同時,要結合|E|大小來考慮。
(4)微分作用可改善系統的動態特性,阻止偏差的變化,有助于減小超調量,消除振蕩,縮短調節時間,提高控制精度,達到滿意的控制效果。所以,在|E|比較大時,Kd取0,實際為PI控制;在|E|比較小時,Kd取正值,實行PID控制。
根據以上分析,將E、EC、ΔKp、ΔKd與ΔKi論域分為15個等級,分別記為-7,-6,-5,-4,-3……+6,+7,把語言變量取值為(負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB))7個語言值。隸屬函數采用三角函數,推理規則采用取大取小規則,模糊規則制定后,采用matlab的evalfis函數計算出模糊規則表,在控制過程中查詢使用。
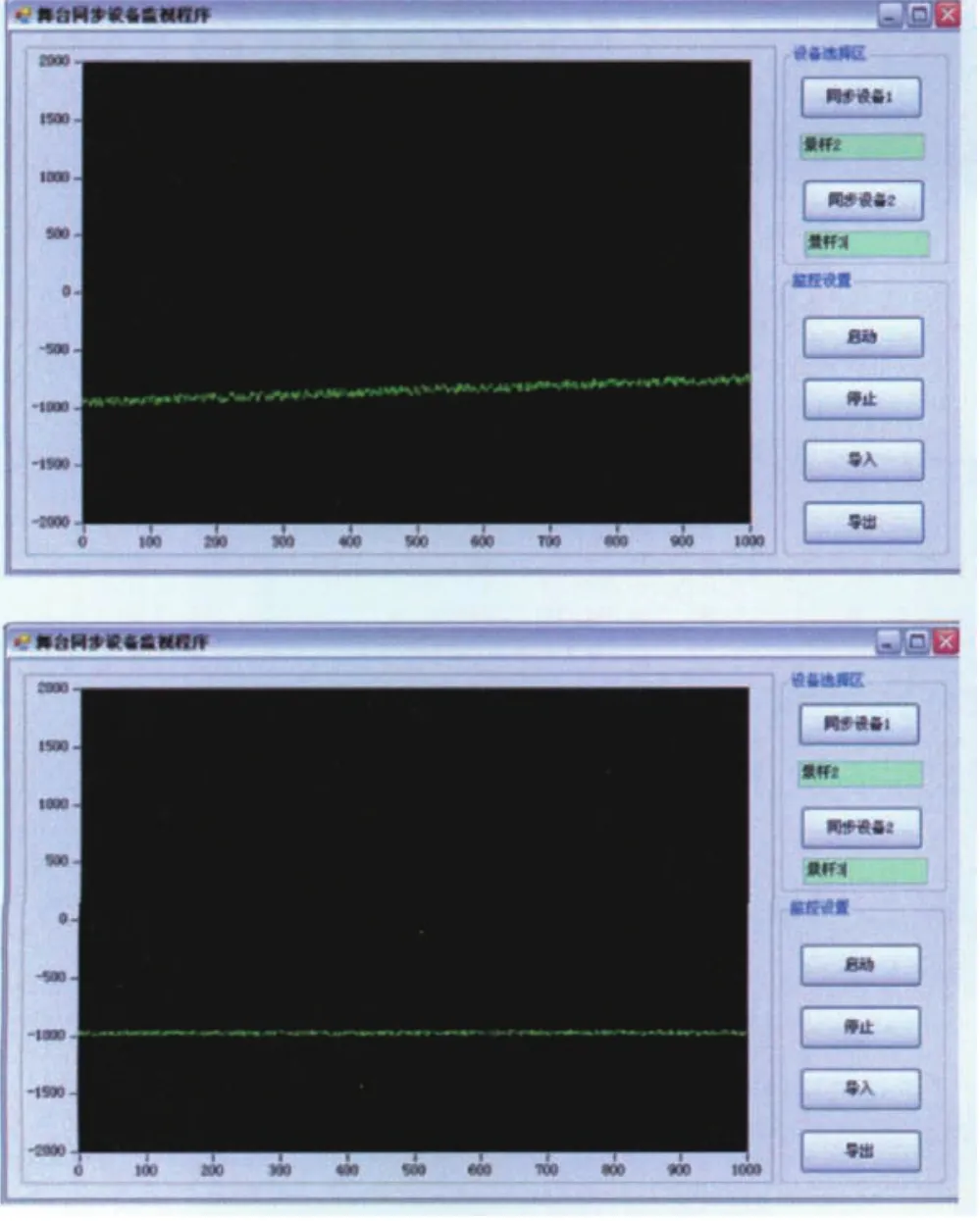
圖5 設備同步運行監控截圖
模糊算法控制流程圖如圖4所示:模糊控制器首先獲取主令設備(將設備號最小的設備默認稱為主令設備)的當前位置值作為r(k),繼而獲取主令設備外的其他被同步設備的當前位置值作為y(k),計算出誤差e(k)及誤差變化Δe(k),將其量化到對應的論域范圍,也即將其模糊化處理,并查詢模糊矩陣表,分別得到三個控制量ΔKp、ΔKd與ΔKi的模糊量,再采用加權平均法將其轉化為精確量,進行PID運算。最后,輸出控制量對控制對象進行控制。此時,判斷當前設備是否為需要同步的最后一個,假如未判斷完成,將繼續下個設備。
5 同步過程運行測試
在多設備同步運行過程中,可通過上位機軟件監視同步運行過程。現選擇兩路同步設備,分別針對采用模糊PID算法和不采用算法的監視設備運行,如圖5所示。選擇景桿2和景桿3同步運行,景桿2作為主設備,景桿3作為從設備,實時選取景桿2和景桿3的位置差作圖。其中上圖為不采用模糊PID算法的設備同步監視圖,下圖為采用模糊PID算法后的設備同步監視圖。圖中X軸為歸一化時間,Y軸為歸一化距離。可以看出,上圖由于設備存在機械誤差,在同步運行過程中誤差越來越大,最大誤差達250歸一化單位。而下圖采用模糊PID算法后,最大誤差為10歸一化單位左右。
6 結語
本文介紹了模糊PID控制系統在舞臺機械設備同步中的應用。該控制系統采用復合模糊PID控制方式,將模糊控制和PID控制相結合,對舞臺設備進行同步控制。此模糊PID同步控制系統已在幾個工程中應用,且運行情況良好,表明其可以實現舞臺機械設備穩定可靠的同步運動,使同步設備在運行過程中穩定、精確、可靠。
[1]劉福才,張學蓮.多級電機傳動系統同步控制理論與應用研究[J].控制工程,2002,9(4)
[2]田文超,張小波,朱志紅等.數控系統中多軸同步技術策略和實現[J].華中科技大學學報,2001,29(5)
[3]童調生.多臺直流電動機同步協調運轉的最優控制[J].電工技術學報,1987,2(1)
[4]李耿軼,王宇融.數控機床多軸同步控制方法[J].制造技術與機床,2000,50(5)
[5]楊同輝.自適應模糊控制在多電機協調中的應用[A].華南理工大學學位論文
[6]陳棟良.多火炮伺服系統交叉耦合同步控制及仿真研究[A].大連理工大學學位論文,2006
[7]于海生.多電機同步傳動微機控制裝置的研制[J].青島大學學報,1999,14(1)
[8]潘湘高,李曉峰.計算機在新型多電機同步系統中的應用[J].微計算機信息,2007,7-1
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00