自由網(wǎng)平差的近似坐標影響研究
2012-11-13 08:51:50周蘊
中州大學(xué)學(xué)報 2012年6期
周 蘊
(鄭州市規(guī)劃勘測設(shè)計研究院,鄭州450052)
1.引言
經(jīng)典平差中,都是以已知的起算數(shù)據(jù)為基礎(chǔ),將控制網(wǎng)固定在已知數(shù)據(jù)上。如水準網(wǎng)必須至少已知網(wǎng)中某一點的高程,平面網(wǎng)至少要已知一點的坐標、一條邊的邊長和一條邊的方位角。當(dāng)網(wǎng)中沒有必要的起算數(shù)據(jù)時,我們稱其為自由網(wǎng),網(wǎng)中沒有起算數(shù)據(jù)時的平差方法,即自由網(wǎng)平差[1,2]。
邊角網(wǎng)中,選取的參數(shù)往往是待定點的坐標,而觀測值一般為方向值、角度值或邊長,因而觀測值和參數(shù)之間建立的關(guān)系均是非線性函數(shù)[3]。如果不給出近似坐標,觀測方程就無法線性化,誤差方程就無法列出。因此如何選取近似坐標,假定自由坐標在自由網(wǎng)平差中的可靠性是個不容忽視的問題。本文對自由網(wǎng)平差中選用不同近似坐標對平差計算結(jié)果的影響進行了詳盡的分析和研究。
2.自由網(wǎng)平差原理
函數(shù)模型:

隨機模型:

其中R(A)=t-d,d為秩虧數(shù),在最小二乘原則下,求得法方程為:

式中R(N)=R(A)=t-d。由于N是奇異的,即法方程是相容方程,它可以有無數(shù)解。因此,附加一個最小范數(shù)條件:

從而得到法方程的唯一解:

(5)式中,N+為N的偽逆,上述平差方法即為秩虧自由網(wǎng)平差。
3.近似坐標的計算
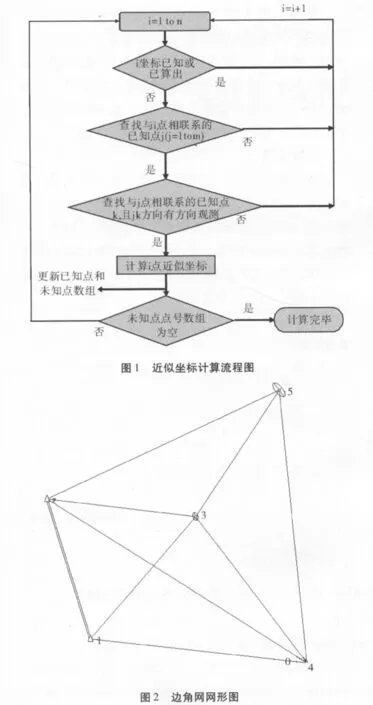
考慮到變形監(jiān)測的邊角網(wǎng)大多為邊角同測網(wǎng),在計算近似坐標時可采用極坐標法。極坐標法的基本思路:若存在已知方位角,首先判斷該方位角的起點是否是已知點A,終點是否是所求的待定點P,如果是,搜索邊長AP即可按極坐標公式計算坐標;若沒有已知方位角或其終點不是P,則搜索與P有方向觀測的已知點A,再由A搜索另一個已知點B,且A到B有方向觀測值,于是可求出AP的方位角,再搜索AP的邊長觀測值,由極坐標公式即可計算P點的坐標。坐標計算的流程圖如圖1所示:
4.不同近似坐標得到的平差結(jié)果比較
為驗證不同近似坐標對平差結(jié)果的影響,本文采用的數(shù)據(jù)為pad2002邊角網(wǎng)算例(原網(wǎng)形如圖2)并選取如下3個參考系:
1)參考系:原點為1號點,1-3方向方位角為0
2)參考系:原點為1號點,1-4方向方位角為0
3)參考系:1 號點(31250.250,11500.410),2號點(33256.570,10900.840)
對3個參考系,采用上述計算方法計算近似坐標并進行自由網(wǎng)平差,結(jié)果見表1、表2。
4.1 觀測值改正數(shù)分析
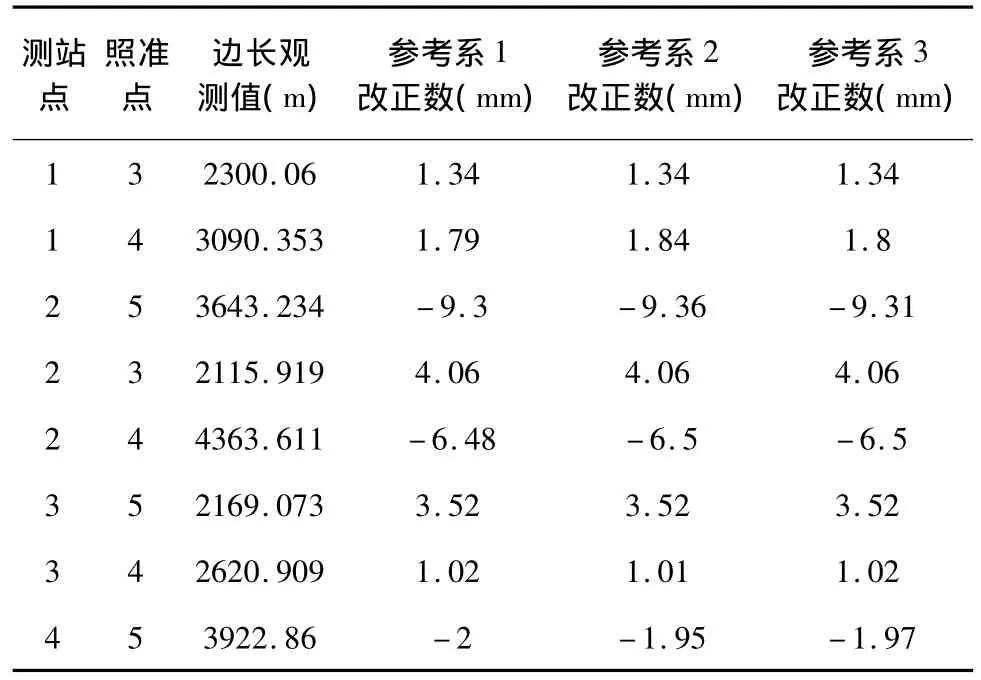
表1 邊長平差值改正數(shù)
由表1,2可知,邊長改正值相差最大為0.06 mm,方向改正值相差最大為0.02s。在誤差允許的范圍內(nèi),可以認為改正數(shù)是相同的。
4.2 三種不同近似坐標參考系迭代次數(shù)
參考系1:5
參考系2:4
參考系3:3
可見采用不同的參考系,需要迭代的次數(shù)是不完全相同的,這和坐標近似值的準確程度有關(guān)。

表2 方向平差值改正數(shù)
4.3 三種不同近似坐標參考系的控制網(wǎng)網(wǎng)圖及誤差橢圓
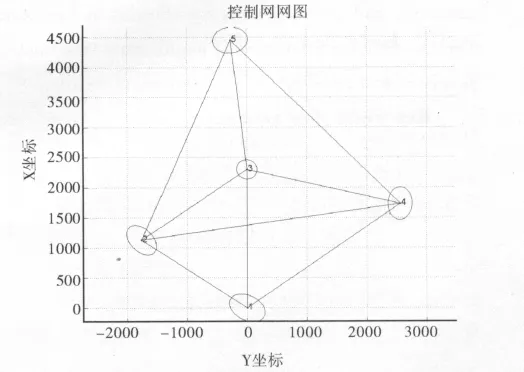
圖3 控制網(wǎng)網(wǎng)圖及誤差橢圓(參考系1)
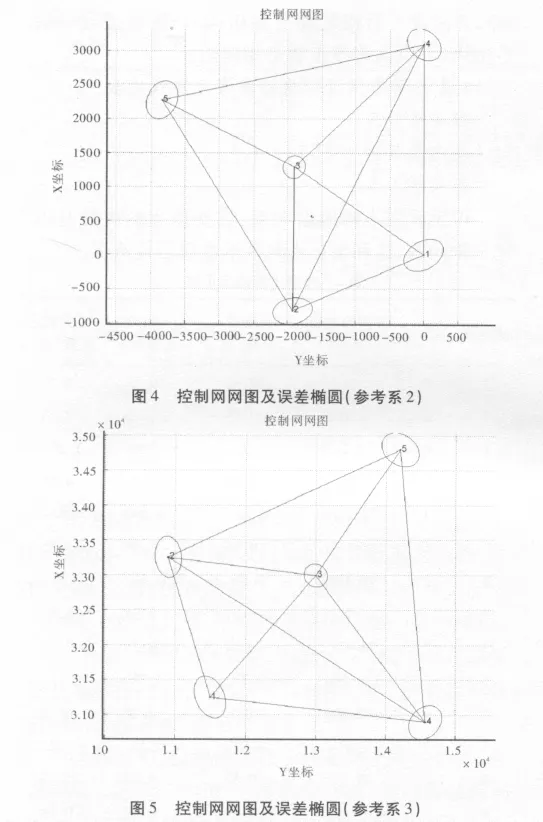
從圖3、圖4、圖5三幅不同近似坐標參考系的控制網(wǎng)網(wǎng)圖及誤差橢圓圖可以明顯看出,不論是控制網(wǎng)的網(wǎng)形,還是誤差橢圓的方向和形狀,都僅僅是旋轉(zhuǎn)。從改正值和誤差橢圓的分析,可以看出控制網(wǎng)選用不同的近似坐標系統(tǒng)進行平差有相同的改正數(shù)和相同的網(wǎng)形及誤差橢圓。
5 結(jié)束語
本文研究了自由網(wǎng)平差中選用不同參考系的近似坐標,因近似坐標的準確度,對平差迭代次數(shù)有一定影響,而平差數(shù)據(jù)的觀測值的平差值,以及平差后的點位坐標并不影響。表明在變形監(jiān)測數(shù)據(jù)的嚴密平差中(迭代次數(shù)足夠),采用不同的近似坐標對平差結(jié)果的影響幾乎可以忽略。
[1]朱建軍,賀躍光,曾卓喬.變形測量的理論與方法[M].長沙:中南大學(xué)出版社,2004.
[2]陶本藻.自由網(wǎng)平差與變形分析[M].武漢:武漢測繪科技大學(xué)出版社,2001.
[3]武漢大學(xué)測繪學(xué)院測量平差學(xué)科組.測量平差基礎(chǔ)[M].武漢:武漢大學(xué)出版社,2003.