操縱面作動對無尾布局無人機縱向氣動特性的影響
2012-11-15 07:02:40馮立好王晉軍巴玉龍
實驗流體力學 2012年2期
關鍵詞:效率
馮立好,王晉軍,巴玉龍
(北京航空航天大學 流體力學研究所,北京 100191)
0 引 言
無尾布局正成為飛行器先進氣動布局的一種發展趨勢。與常規布局相比,無尾布局取消了傳統平尾以及垂尾,減小了全機重量;氣動效率較高,具有更高的升力系數和升阻比;大幅減小了雷達散射截面,隱身性能得到極大提高。但是無尾布局由于取消了平尾、垂尾等操縱面,飛機的操控效率有所下降,這就要求無尾布局飛機采用升降副翼、襟副翼和開裂式阻力方向舵等多組操縱面提高操縱效率[1-2]。
美國在無尾布局飛機方面的研究積累了重要經驗,尤其是1993年后針對高機動無尾布局飛機進行的“創新控制裝置(ICE)”項目研究使得人們對多操縱面布局以及配合等問題有了更加深入的認識。ICE項目分為兩個階段,第一階段總體評估無尾飛機的重量、結構、機動性、雷達信號和飛控系統的綜合性能;第二階段對最有前景的控制裝置進行風洞實驗和計算分析,主要包括全動翼尖、差動前緣襟翼、嵌入面和展開式方向舵等[3-4]。Segawa等[5]利用機翼后緣多段副翼控制無尾布局飛機滾轉,指出多段副翼組合帶來的誘導阻力比常規襟副翼作動低得多。Gillard等[6]通過風洞實驗研究表明,全動翼尖在大迎角階段仍具有良好的偏航控制能力,并且其偏轉所產生的偏航力矩基本不隨側滑角的變化而改變。
國內若干單位同樣對無尾布局的氣動特性及其控制問題進行了相關研究,并且取得了初步的成果。楊廣珺[7]針對大展弦比無尾飛翼布局的氣動設計特點,提出了復合式舵面和開裂式舵面相結合的氣動舵面設計方案,并且分析了各種操縱面實現操縱控制的能力及存在的問題。馬超等[8]介紹了無尾飛翼布局采用升降副翼和開裂式方向舵等新型操縱面的氣動特點,并且在計算氣動特性的基礎上分析了三軸控制效率。李林等[9]進一步采用開裂式方向舵和多組升降副翼組合實現滾轉和偏航操縱,研究結果表明單發失效對偏航操縱效能要求最高,需要適當增加開裂式方向舵的舵容量或對現有布局進行改進設計。左林玄等[10]利用全動翼尖對無尾飛翼布局進行控制,通過風洞測力實驗指出全動翼尖向上作動時將增加飛機的阻力,降低全機的最大升阻比,產生抬頭力矩;全動翼尖單側作動可以在升力系數基本保持不變的條件下提供偏航力矩,但同時也伴隨著較大的滾轉力矩和俯仰力矩。馮立好等[11]通過風洞測力實驗研究分析了副翼、襟翼、全動翼尖單獨作動以及聯合作動對無尾布局無人機橫航向氣動特性的影響。
無尾布局縱向穩定性及其控制比常規布局更加困難。以某多操縱面無尾布局無人機為主體,通過風洞測力實驗,研究不同操縱面作動對飛機縱向氣動特性的影響。
1 實驗模型和方法
飛機模型平面示意圖如圖1所示。全機通過所選翼型放樣生成,各部件均平滑過渡,其表面為光滑曲面。模型采用一體化設計加工成型,表面經過電擊處理,模型材料采用硬鋁,型號為LY12CZ。全機設計6對操縱面,依次為升降副翼N1和N2,襟副翼N3和N4,全動翼尖N5以及鴨翼N6。操縱面均可以沿其軸線偏轉作動,操縱面后緣向下偏轉為正,向上偏轉為負。
測力實驗在北京航空航天大學D1低速風洞中進行,該風洞為開口式回流風洞。試驗段全長1.45m,擴散角約5°,截面呈橢圓形,進口尺寸為1.02m×0.76m,出口尺寸為1.07m×0.81m,湍流度ε<0.3%,最大可用風速為50m/s。實驗中基于機身特征長度的雷諾數為6.5×105。實驗模型的氣動力用一臺六分量桿式應變天平測定,量程10kg,精度為3%。模型采用尾撐,并且保證天平力矩分解中心與模型重心重合,請參見圖1模型中軸線上黑色圓圈所標示。
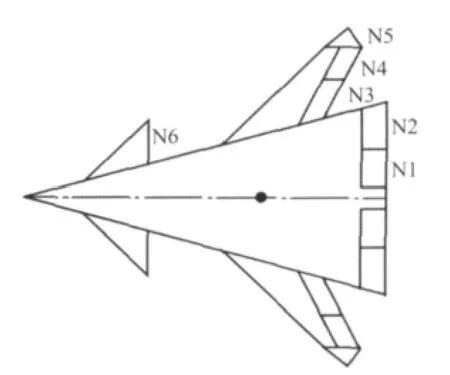
圖1 無人機模型平面示意圖Fig.1 Sketch of UAV model
2 結果分析
2.1 升力特性
圖2給出了操縱面作動對無人機升力系數CL的影響,圖示中“N1+N2”和“N3+N4”分別表示升降副翼N1、N2組合以及襟副翼N3、N4組合,下文圖中的命名規則相同。圖2(a)所示為升降副翼N1、N2組合以及襟副翼N3、N4組合作動情況,在失速之前的線性段,操縱面正向偏轉都會使全機升力系數增加,舵偏角度越大升力系數增量越大,并且升降副翼作動的增升效果要高于襟副翼作動。操縱面沒有作動時的失速迎角為32°,操縱面作動時的失速迎角在30°到34°之間。升降副翼舵偏δ=10°、20°、30°時,最大升力系數CLmax分別增加9.4%、10.5%、13.0%,襟副翼舵偏δ=10°、20°、30°時,CLmax分別增加3.5%、2.6%和3.0%。無人機失速以后,隨著迎角增加,操縱面作動引起的升力系數增量逐漸變小。
如圖2(b)所示,相對于升降副翼和襟副翼,全動翼尖作動對升力系數影響不大,增升效果最好的是舵偏δ=20°時,最大升力系數僅增加3.2%。
圖2(c)給出了鴨翼作動對升力系數的影響,在α<20°的線性段,鴨翼作動時全機升力系數基本沒有變化;在α>20°時,鴨翼作動使得升力系數減小,正向偏轉引起的升力系數減小量要高于負向偏轉,并且舵偏角越大升力系數越小。
2.2 阻力特性

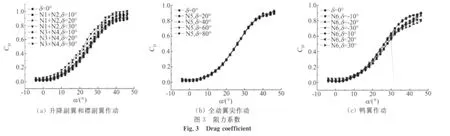
圖3給出了阻力系數CD的變化。如圖3(a)所示,升降副翼N1、N2組合以及襟副翼N3、N4組合作動均會帶來阻力系數的增加,升降副翼偏轉引起的阻力增量高于襟副翼偏轉情況,并且舵偏角越大,阻力增量越大。圖3(b)表明全動翼尖作動對阻力系數影響不明顯。圖3(c)給出了鴨翼作動情況,當α<10°時,鴨翼偏轉引起全機阻力增加;α>20°時,使得阻力系數減小,正向偏轉的減阻效果好于負向偏轉,并且偏轉角度越大減阻效果越明顯。
2.3 升阻比特性
圖4給出了升阻比系數CL/CD的變化。如圖4(a)所示,α<2°時,升降副翼和襟副翼作動都會使得全機升阻比增加。操縱面沒有作動時,升阻比在α=4°時達到最大值,襟副翼偏轉10°和20°時最大升阻比分別增加0.4%和13.4%,其它情況最大升阻比均減小。α>20°時,所有實驗工況下的升阻比基本保持一致。如圖4(b)所示,全動翼尖作動會使得最大升阻比減小,并且舵偏角越大,最大升阻比越小,δ=80°時甚至減小50.6%。圖4(c)給出了鴨翼作動的影響,與無舵偏相比,δ=-10°時最大升阻比增加21.6%,其它工況下最大升阻比均是減小的,并且舵偏角度越大,最大升阻比越小。
2.4 俯仰特性
圖5給出了俯仰力矩系數Cm變化。如圖5(a)所示,操縱面沒有作動時,飛機表現為負的俯仰力矩,亦即低頭力矩,并且失速之前迎角越大低頭力矩越大。升降副翼N1和N2組合以及襟副翼N3和N4組合正向作動都使得全機低頭力矩增加,升降副翼作動引起的低頭力矩增加值要高于襟副翼作動,并且舵偏角越大,低頭力矩越大,N1和N2組合作動δ=30°時,整個迎角范圍內低頭力矩系數增加約為0.2。如圖5(b)所示,全動翼尖作動對俯仰力矩基本沒有影響。圖5(c)為鴨翼作動情況,當α<16°以及α>38°時,鴨翼正向作動使得低頭力矩減小,負向作動使得低頭力矩增加;22°<α<32°時,鴨翼正向和負向作動都使得低頭力矩減小。并且舵偏角度越大,低頭力矩增量越明顯。
2.5 控制效率分析
圖6給出了俯仰力矩系數Cm隨操縱面作動角度δ的變化。如圖6(a)所示,俯仰力矩系數隨升降副翼以及襟副翼偏轉角度變化呈線性規律,隨著舵偏角度的增大,低頭力矩增加,并且升降副翼作動時俯仰力矩曲線的斜率高于襟副翼作動,說明前者對俯仰力矩的控制效率高于后者。在線性段,相同操縱面在不同迎角下的俯仰力矩曲線近似平行,說明控制效率隨迎角變化不大。圖6(b)中全動翼尖作動時俯仰力矩系數基本沒有變化。圖6(c)給出了鴨翼作動情況,鴨翼負向偏轉時低頭力矩系數變化較小,正向偏轉時低頭力矩系數隨偏轉角度的增加稍有減小。
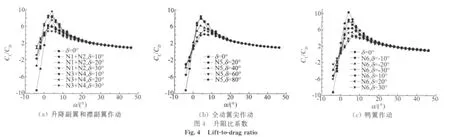
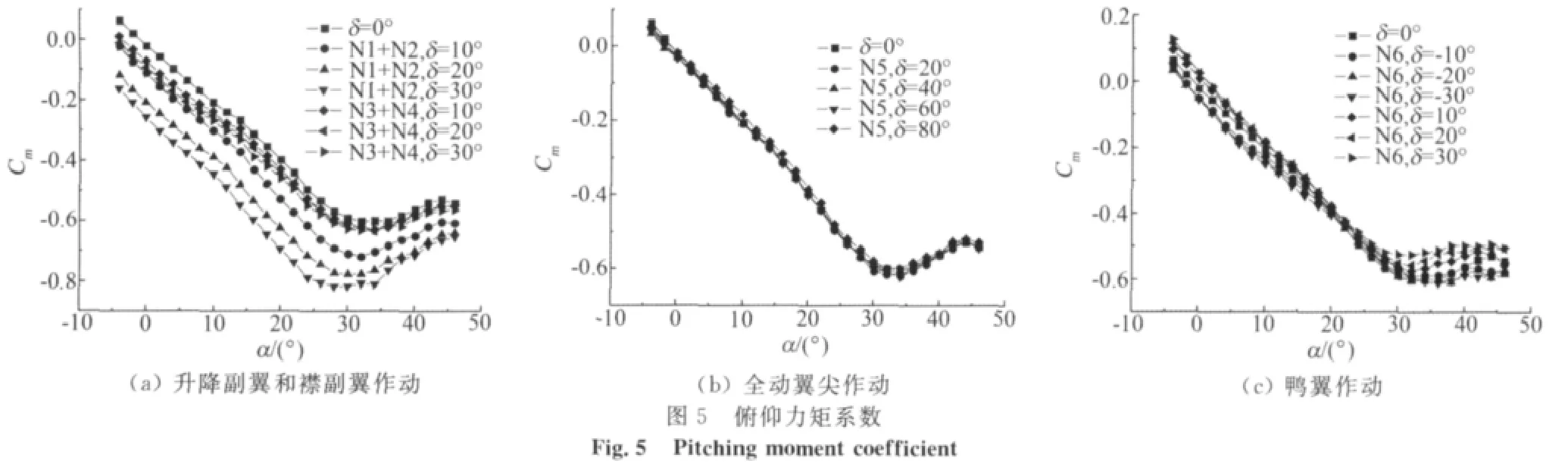
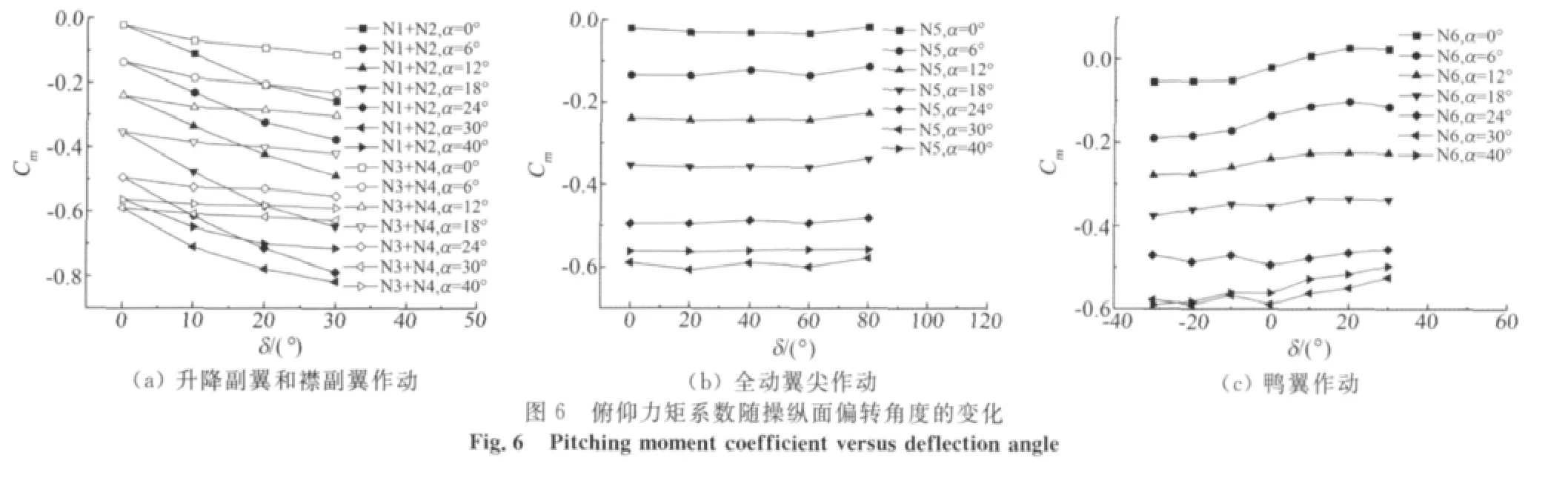
表1統計了操縱面作動對俯仰力矩系數的控制效率。在線性段,升降副翼N1、N2組合偏轉時俯仰力矩的控制效率在-8.09×10-3/°~-9.85×10-3/°之間,N3、N4組合的控制效率在-1.72×10-3/°~-3.07×10-3/°之間,全動翼尖作動的控制效率比 N1、N2組合低接近兩個數量級,鴨翼作動控制效率比全動翼尖稍有增加,在0.42×10-3/°~1.57×10-3/°之間。線性段以后隨著迎角增加,升降副翼、襟副翼和全動翼尖的控制效率都減小,而鴨翼的控制效率是增加的。借鑒常規布局飛機尾容量系數的定義,同樣得到不同操縱面的舵容量系數[8],亦即操縱面面積與力臂之積除以全機面積與氣動弦長之積。升降副翼N1、N2組合舵容量系數為0.18,襟副翼N3、N4組合為0.04,全動翼尖N5為0.02,鴨翼N6為0.09。因此操縱面控制效率與舵容量系數存在較大關系,基本趨勢是隨著舵容量系數的增大而增大。
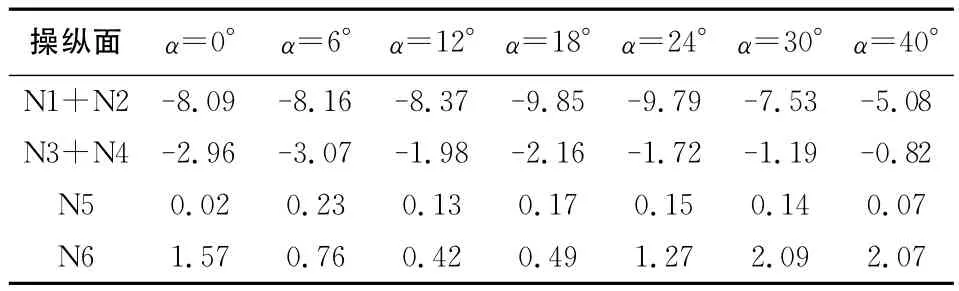
表1 操縱面作動對俯仰力矩系數的控制效率(10-3/°)Table1 Control efficiency of pitching moment coefficient by control surfaces deflection (10-3/°)
3 結 論
通過風洞測力實驗,研究了不同操縱面作動對無尾布局無人機縱向氣動特性的影響,得到以下主要結論:
(1)升降副翼N1、N2組合以及襟副翼N3、N4組合正向偏轉均使得全機升力系數、阻力系數以及低頭力矩增加,升降副翼作動引起的增量要高于襟副翼作動,并且舵偏角度越大增量越大;
(2)全動翼尖作動對全機縱向氣動特性基本沒有影響;
(3)α<16°以及α>38°時,鴨翼正向作動使得低頭力矩減小,負向作動使得低頭力矩增加;22°<α<32°時,鴨翼正向和負向作動都會使得低頭力矩減小;
(4)比較不同操縱面作動對俯仰力矩的控制效率,由高到低依次為:升降副翼、襟副翼、鴨翼和全動翼尖。分析表明不同操縱面的控制效率與其舵容量系數存在較大的關系。
[1] TOURNES C,SHTESSEL Y B.Sliding mode control for tailless aircraft[R].AIAA 97-3633.
[2] BOWLUS J A,MULTHOPP D,BANDA S S.Challenges and opportunities in tailless aircraft stability and control[R].AIAA 97-3830.
[3] DORSETT K M,MEHL D R.Innovative control effectors(ICE)[R].WL-TR-96-3043,1996.
[4] GILLARD W J.Innovative control effectors(configuration 101)dynamic wind tunnel test report rotary balance and forced oscillation tests[R].Ohio United States:Air Force Research Laboratory (AFRL/VAAD),AFRLVA-WP-TP-1998-3043,1998.
[5] SEGAWA H,GOPALARATHNAM A.Optimum flap angles for roll control on wings with multiple trailingedge flaps[R].AIAA 2008-0319.
[6] GILLARD W J,DORSETT K M.Directional control for tailless aircraft using all moving wing tips[R].AIAA 97-3487.
[7] 楊廣珺.大展弦比無尾布局復合式舵面概念設計[D].西安:西北工業大學,2005.
[8] 馬超,李林,王立新.大展弦比飛翼布局飛機新型操縱面設計[J].北京航空航天大學學報,2007,33(2):149-153.
[9] 李林,馬超,王立新.大展弦比飛翼構型的橫航向操縱特性[J].北京航空航天大學學報,2007,33(10):1186-1190.
[10] 左林玄,王晉軍.全動翼尖對無尾飛翼布局飛機氣動特性影響的實驗研究[J].空氣動力學學報,2010,28(2):132-137.
[11] 馮立好,王晉軍,于東升.多操縱面無尾布局飛機橫航向控制[J].北京航空航天大學學報,2010,36(9):1038-1042.
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
