列車轉向架運行姿態檢測系統的研究
2012-11-15 07:36:10張昭英陳建政
中國測試 2012年5期
關鍵詞:轉向架
張昭英,陳建政
(西南交通大學牽引動力國家重點實驗室,四川 成都 610031)
0 引 言
列車的高速行駛,對列車運行安全性及舒適性有更高的要求,提高轉向架橫向運動的穩定性與改善轉向架曲線通過性能往往是互相矛盾的;同時,機車車輛沿直線軌道運行時,在某種速度要求下要產生特有劇烈地蛇形運動,它威脅到列車運行的安全與平穩[1]。對轉向架進行在線的運行軌跡檢測,在不影響轉向架運行的情況下,保證列車高速運行時的安全與平穩非常重要。
慣性導航系統建立在牛頓經典力學定律的基礎之上,使用推算法,用陀螺儀和加速度計提供的測量數據確定所在運載體的位置及姿態。微機電系統的快速發展和計算機的優異性能激發了很多新的應用領域。
1 捷聯慣性導航技術基本原理
1.1 參考坐標系
本文用到的坐標系如下[2]:
慣性坐標系(i系):用Oxiyizi表示,原點位于地球中心,坐標軸相對恒星無轉動;
地球坐標系(e系):用Oxeyeze表示,原點位于地球中心,坐標軸與地球固連;
導航坐標系(n系):用Oxnynzn表示,原點位于導航系統所處的位置P點,坐標軸指向北、東和當地垂線方向(向上);
載體坐標系(b系):用Oxbybzb表示,原點為載體重心,xb軸沿載體橫軸向右,yb軸沿載體縱軸向前,zb軸沿載體立軸向上。
1.2 當地地理導航坐標系機械編排
長距離監控需要考慮地球自轉和導航坐標系相對于地球坐標系的轉動。νen表示運載體相對于地球的速度在當地地理坐標系中的值,其變化率[3-4]為

當式(1)表示在導航坐標系中時,則

式中:fb——加速度計提供的載體坐標系中比力的測量值;
這個矩陣的傳遞依據為



導航系機械編排的框圖如圖1所示。
1.3 捷聯姿態表達式
載體相對于參考坐標系的姿態可用不同的數學表達式來定義。本文采用方向余弦法與四元數法、歐拉角法相結合進行姿態更新。

四元數法[6-7]的思路是:一個坐標系到另一個坐標系的變換可以通過繞一個定義在參考坐標系中的矢量的單次轉動來實現。四元數用符號q表示,其形式為


圖1 導航坐標系機械編排框圖
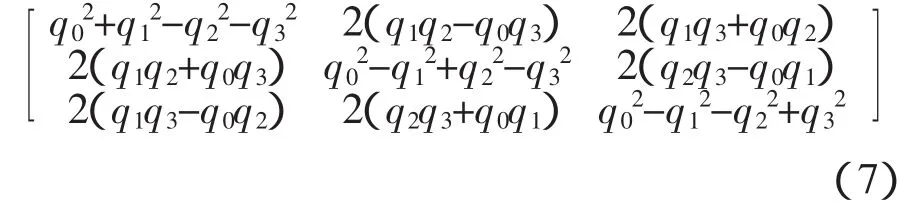
方向余弦陣可以用四元數表示為
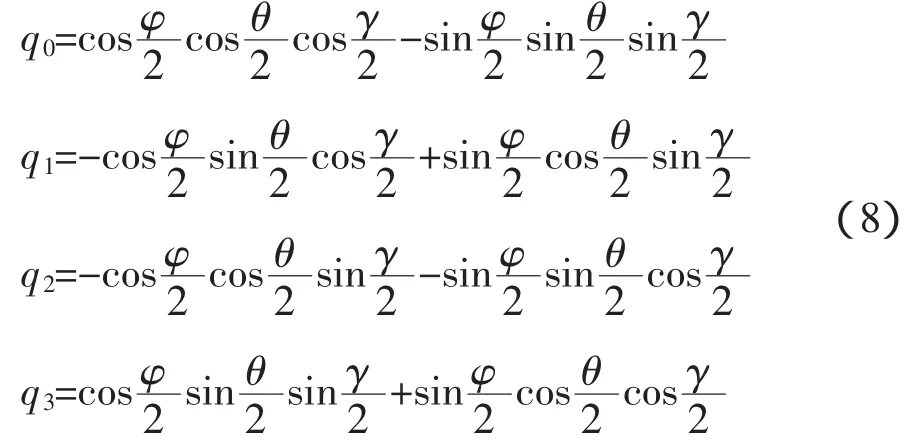
歐拉角法[8]的思路是:一個坐標系到另一個坐標系的變換,可通過繞不同的坐標軸的3次連續轉動來實現,分別用 θ、γ、φ 表示繞參考坐標系的 x、y、z軸的轉動角,即點頭角、橫滾角與搖頭角。用歐拉角表示四元數為
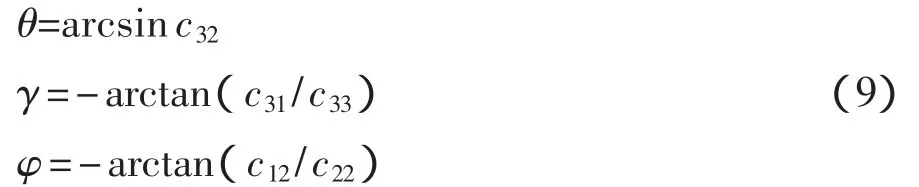
由方向余弦推導出歐拉角
四元數法只需求解4個聯立微分方程,計算量比方向余弦法小,且算法簡單,易于實現。本文采用四元數法進行時間傳遞,代入式(7),得出方向余弦陣,再代入式(2)、式(4)和式(9),得出姿態角與速度等導航信息。四元數隨時間的傳遞[9-10]為
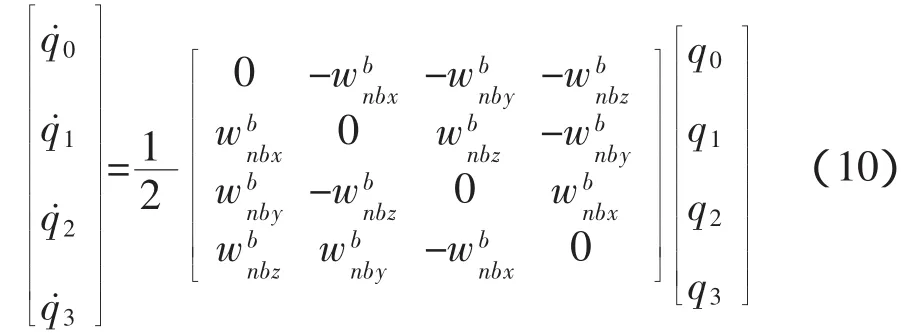

圖2 模擬試驗車
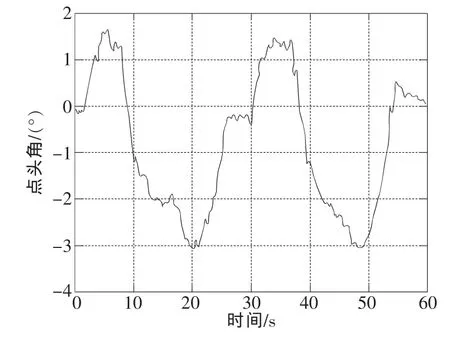
圖3 點頭角變化曲線圖
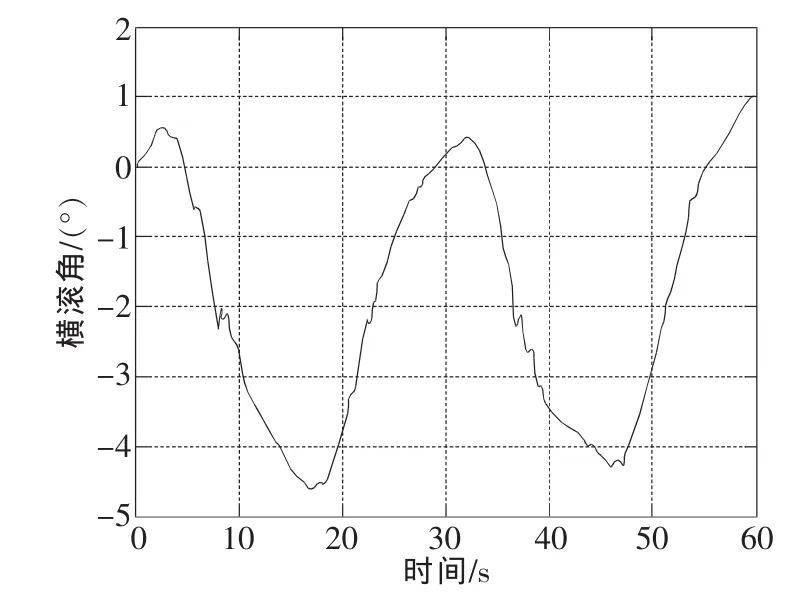
圖4 橫滾角變化曲線圖
2 在模擬試驗車上的驗證
為驗證算法正確性,引入模擬試驗車進行試驗。如圖2所示,模擬試驗車是按照1∶3比例設計制作,該車運行時速為10km左右,整個車由轉向架、牽引電機、控制系統、接觸網、受電弓和軌道等組成。軌道為橢圓環形,內環短軸為7.22 m,長軸為13.7 m;外環短軸為7.79m,長軸為14.27m。
在模擬試驗車轉向架上安裝帶有6自由度慣性傳感器ADISI16360的采集板進行數據采集,繞軌道正向運行兩圈并采集數據,導入用Matlab編寫的程序計算并繪出轉向架點頭角、橫滾角及搖頭角變化曲線圖,如圖3~圖5所示。
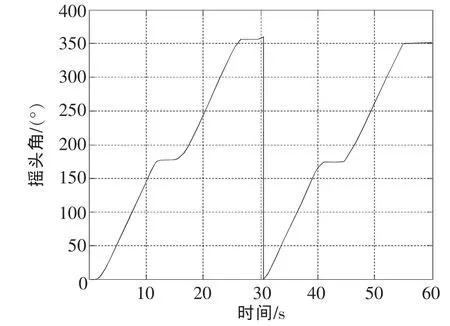
圖5 搖頭角變化曲線圖
由圖3~圖5可以得出:點頭角范圍在-3.1°~1.7°之間;模型車繞橢圓軌道正向運行,由于向心力的影響,橫滾角更偏向負值,其范圍在-4.7°~1°之間;模型車的圓周運動使得繞z軸的搖頭角范圍在0°~360°之間,根據跳軌脫軌判別準則和動態脫軌判別準則[11],并結合軌道性狀,解算出的姿態角均在合理范圍內。
3 結束語
本文研究捷聯慣性導航技術的基本原理及算法,將廣泛運用于航空及航海的捷聯慣性導航技術,通過算法分析及轉換,采用六自由度慣性傳感器測量轉向架三維角速度及加速度,導入Matlab編寫的算法程序,得出其運行姿態。該算法可為判斷其運行穩定性,并結合線路狀態和其他檢測參數對車輛運行狀態進行評估提供依據。
[1]王福天.車輛動力學[M].北京:中國鐵道出版社,1981.
[2]蔣黎星.捷聯慣性導航算法及半實物仿真系統研究[D].南京理工大學,2007.
[3]Titterton D H,Weston J L.Strapdown interial navigation echnology[M].Stevenage:The Instotutvon of Engineering and Technology,2004.
[4]江樹生.捷聯慣性導航系統中陀螺儀信號的數據采集及處理技術研究[D].哈爾濱:哈爾濱工程大學,2002.
[5]李振.慣性導航定位系統數據處理技術的研究[D].南京:南京理工大學,2007.
[6]吳軍,鮑其蓮.高精度捷聯慣導姿態更新優化算法研究[J].電子測量技術,2010,33(2):49-52.
[7]張春慧.高精度捷聯式慣性導航系統算法研究[D].哈爾濱:哈爾濱工程大學,2005.
[8]楊敏.小型捷聯慣性導航系統研究[D].長沙:中南大學,2010.
[9]郭訪社,于云峰,郝福建,等.捷聯慣性導航系統姿態算法研究[J].航天控制,2010,28(1):37-39.
[10]楊菁,陳建政,任愈.采用慣性捷聯算法的電梯運行軌跡檢測方案[J].中國測試,2009,35(4):100-103.
[11]關慶華.列車脫軌機理及運行安全性研究[D].成都:西南交通大學,2010.
猜你喜歡
湖南大學學報·自然科學版(2025年6期)2025-07-16 00:00:00
裝備制造技術(2021年5期)2021-08-14 01:44:56
裝備制造技術(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
經濟技術協作信息(2018年18期)2019-01-23 07:17:20
西南交通大學學報(2018年5期)2018-11-08 10:58:26
現代城市軌道交通(2018年5期)2018-05-28 02:19:35
現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(2015年3期)2015-12-23 09:27:14
