死區效應下逆變器輸出電壓畸變分析及其補償
2012-11-22 07:51:18劉習才
微特電機 2012年12期
劉習才
(同濟大學,上海200080 )
0 引 言
電壓源逆變器在工業中得到了越來越廣泛的應用。在交流傳動的一些領域,如無位置傳感器矢量控制及直接轉矩控制中,電壓源逆變器的輸出將被用于估計電機速度及位置等狀態空間變量。由于逆變器輸出電壓很難直接測量并且需要額外的硬件,所以通常的方法是通過參考電壓矢量來作為逆變器的輸出電壓用于估計。但是,由于死區及電力電子器件的管壓降的影響,逆變器的實際輸出電壓與參考電壓呈現出非線性關系。這影響了估計的準確性,進而影響了電機控制精度。因此定量得出逆變器輸出電壓的畸變顯得尤為重要。
對于如何抑制死區效應,國內外學者做了大量的研究。文獻[3]考慮了設置死區時間和功率開關管的開關關閉時間,提出了電壓補償的方法,但是該方法忽略了對電力電子器件管壓降的影響且未考慮鉗位效應。文獻[4]考慮了電力電子器件管壓降對輸出電壓的影響,但是認為管壓降在運行過程中為一個常數,未考慮管壓降隨電流變化。文獻[5]綜合了死區、開關管的開通關斷時間、開關管和續流二極管的導通壓降三種影響因素,分析了一相橋臂的畸變電壓,但是沒給出三相的合成畸變電壓。文獻[4]估計出零電流鉗位區域及輸出電壓模型,但是輸出電壓的模型依賴于電機參數,并且在補償前需要進行PID 整定。
由于以上文獻均未給出輸出誤差電壓矢量的較精確的模型,并且未以此給出簡單的抑制零電流鉗位效應的方法。本文綜合開關管開、關時間和設置死區時間以及逆變器管壓降的影響,得出了逆變器輸出電壓的畸變矢量。最后根據輸出電壓模型提出了在靜止坐標系中有效而簡單的抑制鉗位效應的死區補償方法。
1 開關時間和死區時間引起的誤差電壓
任何固態的功率開關管都存在一定的導通時間Ton和關斷時間Toff,為了防止上下橋臂直通,需要將理想的SVPWM 驅動信號的上升沿或下降沿延遲一段死區時間Td。
為了方便分析死區時間的影響,下面首先約定電流的方向。如果電流從逆變器流入電動機,則電流方向為正,反之為負。圖1 分別為ia>0 和ia<0時的電流方向。由圖可知,IGBT 共有4 種工作狀態。

圖1 逆變器a 相橋臂電流流向
設a 相電流為ia,a 相橋臂在誤差時間M 內產生的誤差電壓的平均值:[3]

對于其余兩相,有著類似的結果。
2 IGBT 管壓降的影響
開關三極管和二極管均有正向管壓降,其值是由電力電子器件類型和負載電流大小共同決定的。設Vce為開關管的管壓降,Vd為續流二極管的管壓降。下面分別就a 相電子開關管的通斷組合和電流路徑及輸出電壓列表,如表1 所示。

表1 a 相電子開關的通斷組合
假定在一個采樣周期內電流的極性不變。由表1 可知,當考慮電子器件的管壓降時,輸出電壓:

考慮到udc遠遠大于(-Vce+ Vd),在此忽略(-Vce+ Vd),因此上式可改寫:

實際上開關管管壓降Vce和Vd二極管管壓降隨著電流的增大而增大。為了便于分析,假定Vce和Vd與電流呈線性關系。設開關管電壓為Vce0,等效電阻為rce,二極管導通電壓為Vd0,等效電阻為rd,則Vce和Vd可由下式表示:

將上式代入式(3)得:

由于中間項的作用相當于電阻的作用,對于負載是永磁同步電動機來說,相當于永磁同步電動機的定子繞組的電阻增大0.5(rce+ rd),因此相當于在逆變器的輸出端接上了一個每相電阻均增0.5(rce+ rd)的等效電機。因此對于“等效”電機來說,逆變器的輸出:

在一個周期內的平均誤差電壓:

對于等效后的永磁同步電動機,由于電機為三相對稱Y 型結構,因此有:

槽孔混凝土澆筑嚴格遵循先深后淺的順序,澆筑施工時確保導管底端有足夠的尺寸被混凝土埋住,確保防滲墻澆筑質量。同時,應保證連續供料,一次性連續完成,保持導管埋入混凝土的深度不小于1.2 m,但不宜超過3 m,以防發生泥漿混摻或埋管現象;保持全槽段范圍內混凝土面均衡上升,上升速度應不低于2 m/h,且高差應控制在0.3 m范圍內。
根據上式可求得:

對于其余兩相,有類似的結論。
下面運用空間矢量的方法來求解誤差矢量的幅值及方向。不失一般性,設電流矢量方向為正負負(+--),代入每相畸變電壓電壓方程,可以求得畸變電壓矢量幅值:

由于以上推導是對于“等效電機的模型”,對應于等效前的電機,每相電壓減小(rce+ rd)ip,因此對應于實際電機,減小的電壓矢量為
因此對于逆變器,誤差電壓矢量的幅值:

方向與合成電流矢量方向相反。
3 SVPWM 死區補償策略
3.1 電壓補償法
以上分析得出了由死區效應引起的三相定子繞組相電壓的畸變的幅值和大小,為了抑制死區效應,本文使用電壓補償法,根據電流極性產生一個與誤差矢量大小相等而方向相反的矢量,從而抵消死區效應。用Vcomi表示補償電壓矢量,則補償電壓矢量與誤差矢量Δ V 的關系:

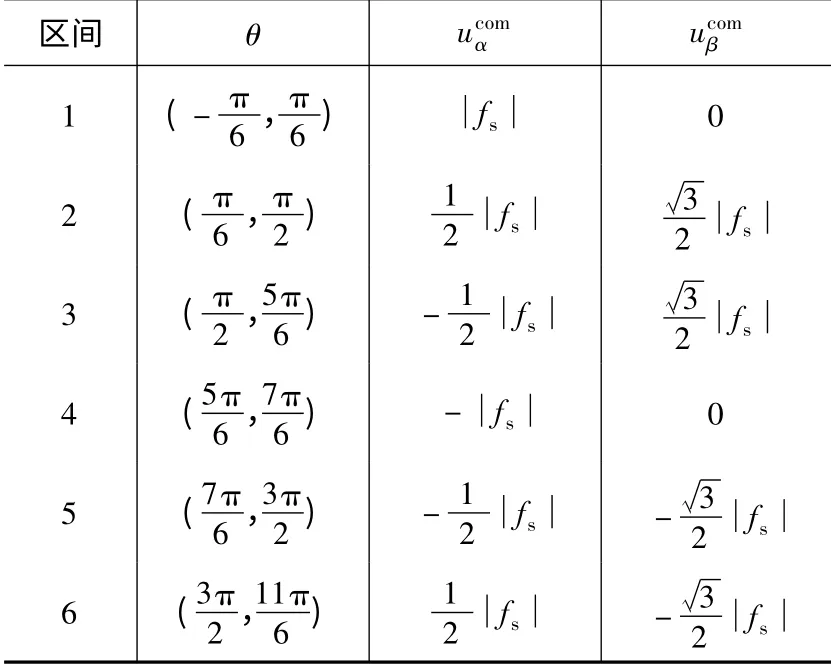
表2 電流矢量角度與補償電壓矢量的關系
3.2 鉗位效應的抑制
為了獲得更精準的補償效果,需要考慮實際系統的零電流鉗位效應[2]。為了使補償方法盡量簡單,以a 相為例,當ia= 0 時,對a 相不進行死區補償,以免產生誤差補償,此時求出b、c 兩相的誤差電壓的合成矢量,進而求出補償電壓。類似可對b、c相采用相應的優化補償方法。
4 實驗結果及分析
為了驗證提出的這種新型的方法的有效性,選用英飛凌HybridPACKTM1 及配套驅動評估板進行了實驗。開關管開通、關斷時間分別Ton= 0.12 μs,Toff=0.54 μs,開關管導通管壓降為Vs= 2 V,二極管導通壓降為Vs= 2.2 V,設置死區時間為Td= 2 μs 。永磁同步電機工作在400 r/min,在負載分別為5 N·m和40 N·m 時對相電流進行采樣。將采樣后的數據通過MATLAB 作圖可得圖2~圖3 的補償前后的電流對比圖。

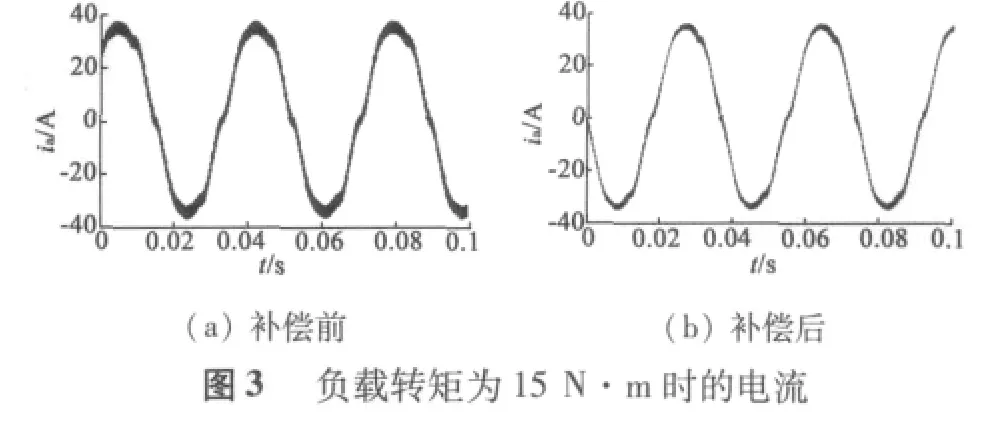
從圖3 可以看出,受死區時間的影響零電流箝位現象明顯,而且在波峰和波谷位置電流波形畸變嚴重。加入本文提出的死區補償方法后,波形明顯改善,畸變現象得到較好抑制,更加接近于平滑的正弦波,實驗結果證實了本文所提出方法的有效性。
[1] Yoshihiro Murai,Tomomufi Watababe.Waveform distortion and correction circuit for PWM inverters with switching lag-times[J].IEEE Transactions on Industry Applications,1987(5):881-886.
[2] Choi Jong-Woo,Sul Seung-Ki.A new compensation strategy reducing voltage/current distortion in PWM VSI systems operating with low output voltages[J].IEEE Transactions on Industry Applications,1995,31(5):1001-1008.
[3] 吳茂剛.矢量控制永磁同步電動機交流伺服系統的研究[D].杭州:浙江大學,2006.
[4] 王高林,于泳,楊榮峰,等.感應電機空間矢量PWM 控制逆變器死區效應補償[J].中國電機工程學報,2008,28(4):79 -83.
[5] Urasaki N,Senjyu T,Uezato K,et al.A dead-time compensation strategy for permanent magnet synchronous motor drive suppressing current distortion[C].IEEE IECON'2003,(2):1255-1260.
[6] Lazhar Ben-Brahim.On the compensation of dead time and zero-current crossing for a PWM-inverter-controlled AC servo drive[J].IEEE Transactions on Industry Applications,2004,5(5):1113-1117.
