基于CATIA的玉米播種機樣機建模
2012-11-22 02:08:51安徽農業大學工學院安徽合肥230036
長江大學學報(自科版) 2012年8期
孫 健 (安徽農業大學工學院,安徽 合肥 230036)
基于CATIA的玉米播種機樣機建模
孫 健 (安徽農業大學工學院,安徽 合肥 230036)
根據玉米播種機的基本設計原則和機具要求,對玉米播種機的排種器、開溝器、鎮壓輪等進行分析設計,得出各零部件的幾何參數,為后續基于CATIA的三維參數化建模提供理論依據。采用三維參數化造型軟件CATIA對各零部件進行實體建模,并完成玉米播種機整機裝配和干涉檢查,以較為直觀的方式顯示玉米播種機中所有零部件的組裝情況,可為實物裝配路徑的制定提供參考,有效地提高設計速度。
玉米播種機;CATIA;虛擬設計
傳統的播種機設計要經過樣機設計、樣機試制、田間試驗、改進設計、再試制等多個步驟。這種設計方法存在的缺點有:產品研制周期長、成本高,機構參數只能靠設計人員根據經驗確定,在制造之前看不到零部件實物,許多問題只有在制造出產品以后才能發現,且不能進行預裝配和干涉檢驗[1]。虛擬樣機技術是為了解決傳統的設計弊端,在產品開發過程中,利用現代計算機仿真技術,在計算機上建造出產品的整體模型,預測產品的整體性能,改進產品設計的一種技術[2]。使用該技術,工程師可以使用計算機軟件對零部件進行特征建模并進行虛擬裝配,從而獲得機械系統的虛擬樣機。在虛擬環境中真實地模擬系統的運動,觀察并試驗各組成部件的相互運動情況。使用這種方法可以在計算機上方便地修改設計缺陷,直至獲得最優設計方案后,再制造出物理樣機。
CATIA是IBM和Dassault System公司合作推出的CAD/CAE/CAM一體化軟件,它的集成解決方案覆蓋所有的產品設計與制造領域。CATIA的模塊具有全相關性,在產品開發過程中對某一處進行修改,能夠擴展到整個設計中,同時自動更新裝配體、設計圖紙以及制造數據所有的工程文檔,方便快捷; CATIA便于裝配管理,它可以利用一些簡單直觀的命令實現零件的裝配,支持大型復雜裝配體的構造和管理[3]。
本研究是基于現有播種機的使用情況,結合我國地塊小、拖拉機動力小和農民購買力低等現狀而設計的懸掛式小型玉米免耕播種機,以期滿足我國實際生產的需要,該機可以一次性完成開溝、施肥、播種、起壟、鎮壓等一系列作業[4]。
1 基于CATIA的玉米播種機建模設計
1.1 結構特點與設計要求
由于國外農場的土地面積較大,拖拉機的功率也較大,所以免耕播種機一般是牽引式的,而且大多采用多梁結構和多排開溝器,各開溝器之間間隔較大,防堵性能較好[5-7]。本研究所設計的玉米播種機采用三點懸掛掛接在小型拖拉機上,該機主要由肥料箱、機架、開溝器、排種器、排肥器、鎮壓輪等部分組成。設計過程中主要考慮以下特點和要求:
(1)結合我國農業機械馬力小的特點和實際的農藝情況,以滿足我國使用需要的玉米播種機;
(2)為了避免土壤被壓實,要減少播種機進入土地的作業次數,采用復式作業,一次進入作業地可完成將開溝、施肥、播種、起壟、鎮壓等工作;
(3)要求播種機有良好的仿形功能和穩定性,播量和播深均勻,具有播深調節裝置,能實現整體和微量的調節[8];
(4)要求做到種肥分施,避免燒苗,且種子與肥料之間至少有5cm厚度的垂直土層;
(5)要求播種機上設計相應的鎮壓、起壟裝置,以保證農田水分的要求,避免土壤水分的流失;
(6)為了方便作業和降低成本,要在滿足功能要求和強度要求的前提下,盡量將整機結構設計緊湊,減輕整機的重量,節約使用材料,便于懸掛和田間運輸。
1.2 虛擬樣機設計方案

圖1 虛擬樣機設計路線
根據設計要求,虛擬樣機采用圖1所示的設計路線。
1.3 基于特征的參數化設計
在以CATIAV5R19為技術平臺的零件實體建模技術中,特征是組成零件實體模型的基本元素,是描述產品信息的集合,也是設計或制造零部件的基本幾何體。
虛擬設計中零件實體建模技術中的特征詳細劃分如圖2所示。

圖2 特征分類圖
1.3.1 輔助特征
輔助特征主要包括工作軸、工作平面、工作點、構造特征和特征管理樹,是進行基于特征的零件實體建模設計的輔助工具。
1.3.2 幾何特征
根據創建方式的不同,幾何特征可分為直接生成特征和草圖特征。

圖3 用抽殼特征完成的機架圖
直接生成特征主要包括倒角特征、肋板特征、陣列特征、鏡像特征和抽殼特征等,是直接在實體模型上創建的特征,是系統已定義好的參數化特征。直接生成特征的關鍵是要進行特征定位和定義特征變量化。在建模時,只需進行特征定位和輸入特征變化量值即可形成該特征,大大提高了設計效率。草圖特征是將草繪出二維輪廓線或橫截面進行拉伸、旋轉、掃描和放樣形成的特征。如圖3所示的機架零件就是利用抽殼特征完成的。
1.4 基于特征的零件實體建模流程
基于特征的零件實體建模流程如圖4所示。

圖4 零件實體建模流程圖
1.5 零部件的實體建模
播種機的主要零部件包括開溝器、排種器、機架、鎮壓輪和傳動裝置等,其主要零部件的實體建模如圖5至圖9。

圖5 開溝器裝配圖
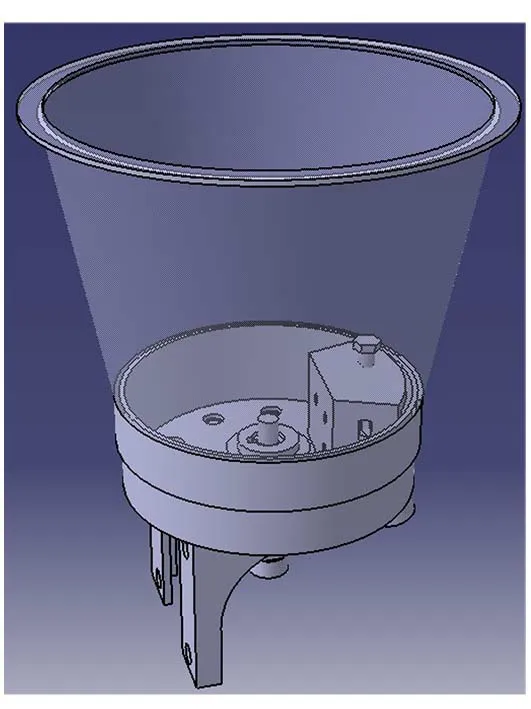
圖6 排種器裝配圖
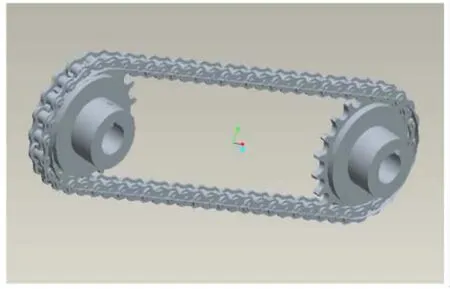
圖9 鏈條裝配圖
2 玉米播種機的虛擬裝配
虛擬裝配就是將各零部件按照一定的設計關系組裝在一起,使裝配體能完成某一項功能。虛擬裝配采用計算機仿真與虛擬現實技術在計算機上仿真裝配的全過程,實現產品的工藝規劃、加工制造,裝配和調試。虛擬裝配允許設計人員考慮可行的裝配序列,自動生成裝配規劃,使產品的制造向著自動化、數字化的方向發展,虛擬裝配是產品數字化定義中的一個重要環節。
目前,產品的裝配設計有2種方法:一種是自底向上的設計,即先完成零部件的實體造型,然后裝配成產品;另一種是自頂向下的設計,即從產品的功能的要求出發,先進行概念設計,然后進行裝配結構設計,建立起約束驅動的產品設計模型,通過約束求解,獲得滿足功能要求的產品設計。
2.1 玉米播種機的虛擬裝配方法
對于復雜裝配體的虛擬裝配設計,首先要對復雜系統進行結構分析,將其分解成若干個功能模塊,然后分別進行裝配。若某些功能模塊結構仍較復雜,可重復分解,直至得到一系列簡單的子系統。虛擬裝配的順序是先裝配最底層也是最簡單的子系統,然后將其作為一個整體裝配到上一個較為復雜的功能模塊。按照此法,分別完成各功能模塊的裝配,最后完成總裝和干涉檢驗,以進一步檢測虛擬裝配的可靠性。此裝配方法,經實踐檢驗,可有效地提高設計和裝配效率。
在現實中用鉚接、焊接、螺栓連接等方式來實現裝配,而虛擬裝配則采用面與面之間的對齊、匹配、垂直以及銷釘連接、圓柱連接、槽連接等裝配關系來實現。在虛擬裝配過程中應注意零件之間的約束關系,考慮零件在裝配后應有的自由度,裝配的結果直接影響后續的有限元分析和動態仿真。
基于上述分析,在玉米播種機的設計過程中,本研究采用了自底向上的裝配方法。在虛擬裝配前,首先對其進行結構分析,其系統的主要組成模塊如圖10所示;其次,完成開溝器、排種器、機架和地輪等全部零件設計和建模,然后分別獨立完成其虛擬裝配,并保存為相應組件,這就完成了系統最底層的虛擬裝配;最后將各個模塊的裝配體匯總裝配即可。玉米播種機總裝配如圖11 所示[9]。

圖10 玉米播種機組成模塊圖

圖11 玉米播種機總裝配圖
2.2 動態干涉檢查
干涉檢查是對虛擬裝配效果的有效評價,對播種機裝配體進行干涉檢查可初步評價其結構設計是否合理,若無干涉則可以在現實中完成裝配,否則需要通過公差分析來檢驗零件的干涉情況。發現問題時,可對模型進行修改,直到獲得滿意的結果,并可動態模擬裝配體上零件的運動效果。通過虛擬裝配可以及早地發現問題,并以較小的代價解決問題。
在CATIAV5R19平臺上,通過對各部件的運動分析,利用干涉檢查工具對播種機裝配體進行全局干涉檢查,發現整機運轉正常,未出現有干涉的區域,表明不存在干涉,整機結構設計合理,只要各零件在加工時工藝得到保證就可以順利地完成現場裝配。
3 總結
應用CATIA軟件對玉米播種機進行特征下的實體建模,進行零部件虛擬設計,最后完成了虛擬裝配設計和干涉檢查。以較直觀的方式顯示了玉米播種機中零部件的組裝狀況,優化了裝配路徑,可以有效地提高設計速度,縮短新產品的研發周期,提高產品設計質量,降低產品研發成本[10]。
[1]劉 飛,趙滿全.基于Pro/E的膜下播種機排種裝置的設計與仿真分析[J].農機化研究,2009,(1):53-55.
[2]王 侃,楊秀梅.虛擬樣機綜述[J].新技術新工藝,2008,(3):29-31.
[3]孫小明.基于有限元分析的AMT選換檔機構研究與設計[D].合肥:安徽農業大學,2009.
[4]尹成龍,朱 林,吳元梓,等.基于SolidWorks的新型玉米播種機虛擬設計[J].農業科技與裝備.2009,(4):58-60.
[5]ThomasJ.R,Hughes,Ernest Hinton.Finite element methods for Plate and shell Structures[M].Swansea,U K:Pineridge Press International,1986:75-96.
[6]Cormack C M,Monaghan J.2D and 3D Finite Element Analysis of a Three Stage Forging Sequence[J].Journal of Materials Processing Technology(S0924-0136),2002,127:48-56.
[7]姚宗路.小麥對行免耕播種機的研究:[D].北京:中國農業大學,2005.
[8]賈洪雷,馬成林,孫裕晶.耕整種植聯合作業工藝及配套機具[J].農業機械學報,2004,35(6):62-64.
[9]常 靜,尹成龍.基于Pro/E的玉米播種機虛擬設計[J].機械研究與應用,2010,(6):97-98.
[10]虞 敏,徐 翀,俞 濤.復雜產品虛擬樣機數據管理研究[J].計算工程與設計,2006,27(18):3403-3405,3435.
10.3969/j.issn.1673-1409(S).2012.08.014
TH122;S223.2
A
1673-1409(2012)08-S042-04
2012-08-01
孫 健(1975-),男,安徽安慶人,碩士生,副教授,主要從事農業機械設計研究。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
現代裝飾(2020年7期)2020-07-27 01:27:42
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
流行色(2020年1期)2020-04-28 11:16:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
