基于模糊控制與預測控制切換的翼傘系統航跡跟蹤控制
2012-11-26 01:18:26李永新陳增強孫青林
智能系統學報 2012年6期
關鍵詞:系統
李永新,陳增強,孫青林
(南開大學信息技術科學學院,天津300071)
翼傘系統應用方式主要分為投放和回收.應用領域包括3個方面:航空航天、軍事領域和民用領域.在航空航天領域,翼傘系統可用于飛行器回收、無人駕駛機降落等過程,可降低對駕駛技巧的要求,不必設計繁雜的著陸控制程序,并使飛行器在惡劣的天氣情況下同樣能完成無損著陸.在軍事領域,翼傘系統可以用于物資、武器裝備的精確投放,可以精確、高效、安全地將武力、物資投送到戰場.在民用領域,目前主要利用動力滑翔傘進行觀光、航拍和廣告等.
在自然災害發生時,陸路交通被破壞、運輸機無法著陸的情況下,翼傘系統用于物資投放,具有速度快、機動靈活的特性.以往使用的常規降落傘是無機動不可控的,執行飛行器回收和物資投放任務,傘體飛行軌跡受風的影響,著陸偏差較大,實際系統偏差有時會達到幾公里甚至是十幾公里,使得搜救時間和回收成本大大增加[1].可控翼傘系統由于具有良好的滑翔性能和可操縱性[2-3],從而減少投放誤差,降低回收成本.美國著名的X-38計劃將翼傘用于救生飛船在飛行最后階段和著陸過程的自主歸航,降低了駕駛技術的要求[4].經過多次試飛,驗證了翼傘技術在航天器定點無損回收方面的重要價值[5].歐洲航天局也進行了大型翼傘的自主歸航實驗項目,論證大型翼傘的自主、定點歸航以及雀降著陸的可行性,以期能達到未來載人空間飛行器回收的安全和可靠性的要求[6-7].在翼傘系統的控制器設計中,文獻[1]針對傳統PID控制和模糊PID控制以及混合型PID控制進行了分析和研究,并依此進行控制器的設計.文獻[8]針對水平方向的航跡跟蹤控制,采用了廣義預測控制算法求解控制量,對翼傘系統進行控制.
本文對可控翼傘系統在歸航中的目標接近階段和能量控制階段[9]航跡跟蹤進行控制,采用模糊控制與預測控制相互切換的方法,發揮模糊控制魯棒性好、計算量小的優勢,以期在減少實際航跡與期望航跡誤差的情況下,采用預測控制過程的計算量,并達到較好的控制效果.
1 翼傘系統的數學模型
1.1 翼傘的幾何參數
針對沖壓翼傘,在建立其數學模型前,先引入此類翼傘在充滿狀態下的幾何描述參數[1].
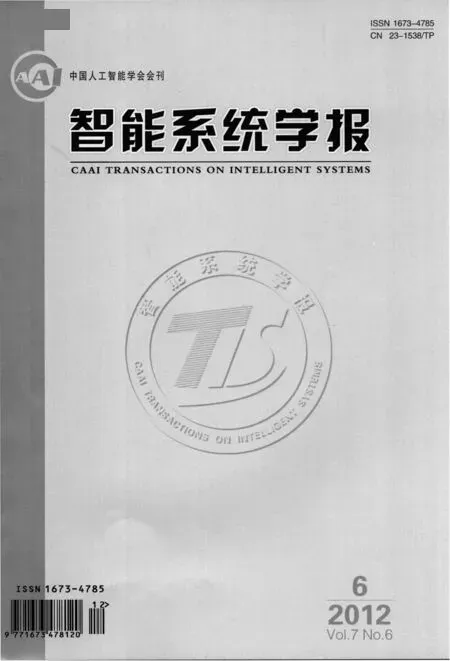
圖1中,b為翼展,即傘衣充滿后的水平投影沿翼展方向的長度;c為弦長,即傘衣充滿后的水平投影沿弦向的長度;e為厚度,即翼傘剖面的上弦線和下弦線間最遠距離;h為名義拱高,即傘衣展向圓弧的頂點到兩端點連線的距離;AR為展弦比,AR=b/c.
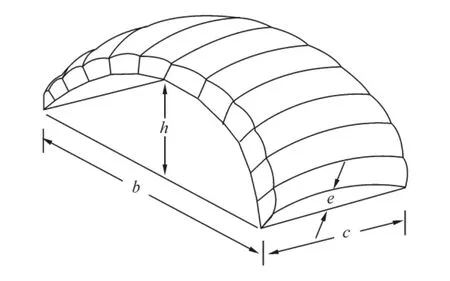
圖1 傘衣的尺寸Fig.1 Sketch map of the parafoil system
圖2中,C為傘繩的虛擬交匯點,亦圓弧形傘衣對應的圓心;r為名義繩長,即匯交點到傘衣的距離;Θ為展向彎曲弧度,圓弧形傘衣所對應的圓心角的1/2;R為翼傘系統的滾轉中心;P為翼傘系統的俯仰中心.
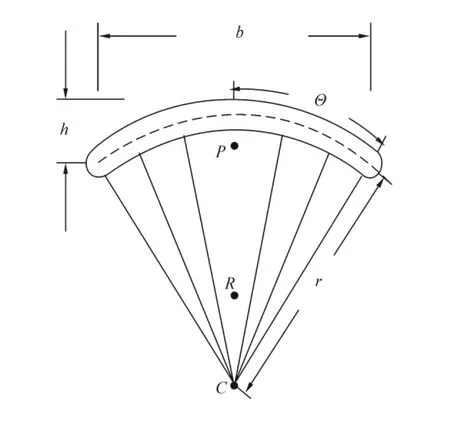
圖2 翼傘正視圖Fig.2 A front view of the parafoil system
1.2 翼傘系統建模的基本假設
文獻[1,10]中,為建立翼傘系統的六自由度動力學方程,提出了如下假設:
1)翼傘在展向對稱,傘衣在完全張滿后具有固定的形狀;
2)回收物是旋成體(即與鉛垂軸垂直的面一定是圓),受到的阻力遠大于升力,升力忽略不計;
3)回收物與翼傘剛性連接并視為一個整體;
4)傘衣的壓心(即翼傘所受空氣動力合力的作用點)和質心重合,位于弦向距前緣1/4處;
5)大地為理想平面.
1.3 翼傘系統建模用到的坐標系及轉化
翼傘系統建模過程用到2個滿足右手法則的坐標系:
1)大地坐標系OeXeYeZe,原點Oe通常取傘衣完全展開后系統質心所在的位置.OeZe鉛垂向下,OeXeYe與水平面平行,OeXe指向翼傘系統的初始運動方向,如圖3所示.
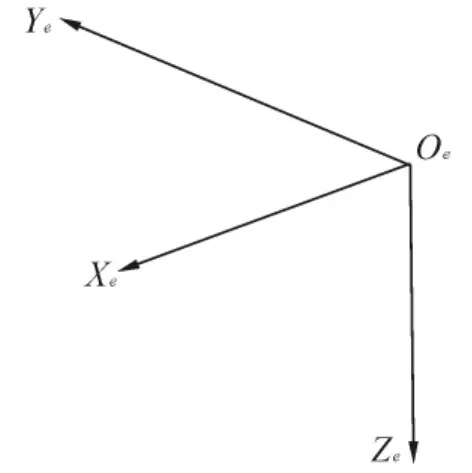
圖3 大地坐標系Fig.3 Earth coordinate system
2)翼傘系統體坐標系OtXtYtZt,原點Ot位于翼傘系統質心,OtZt軸經過回收物質心,指向回收物.OtXtZt為翼傘幾何對稱面,OtXt指向傘衣前緣,OtYt軸與其他兩坐標軸構成右手系,如圖4所示.
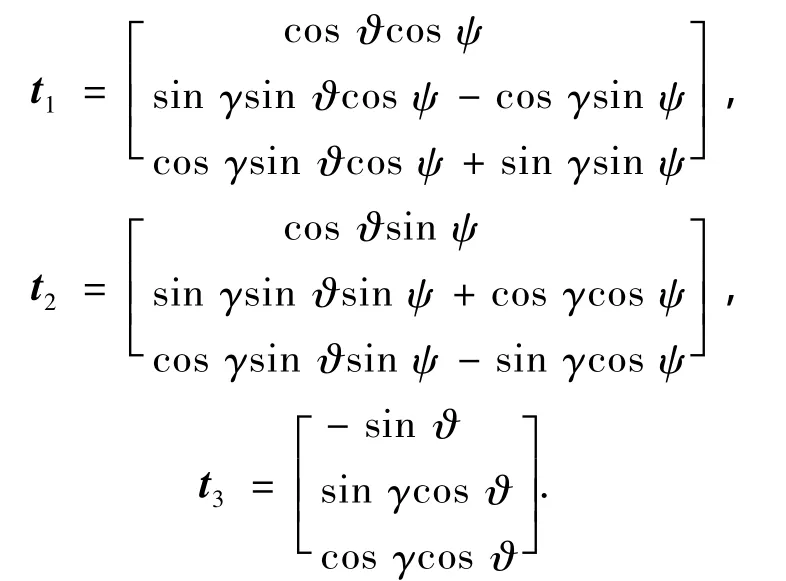
定義翼傘系統的3個姿態角:偏航角ψ、俯仰角?、滾轉角γ,分別指翼傘系統繞其體坐標系Zt軸、Yt軸、Xt軸轉動所成的角度[1].
大地坐標系到體坐標系的轉換矩陣可以表示為

式中:
1.4 翼傘系統的運動方程
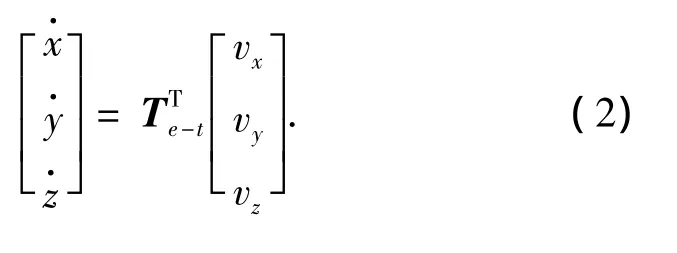
在文獻[8]中,針對建立的翼傘系統運動方程,有如下計算過程,當x、y、z為翼傘系統在大地坐標系下的位置,vx、vy、vz為翼傘系統在體坐標系下的速度,有
并且
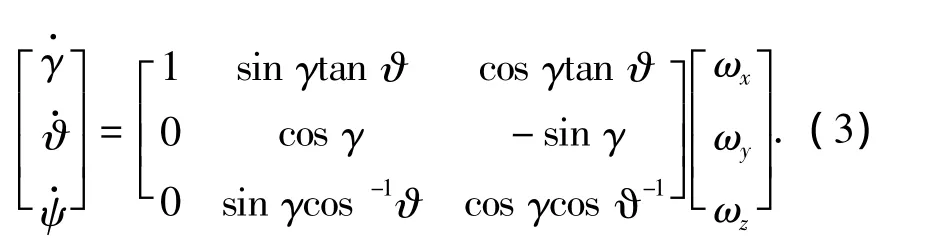
式中:ωx、ωy、ωz為翼傘系統在體坐標系下的角速度.
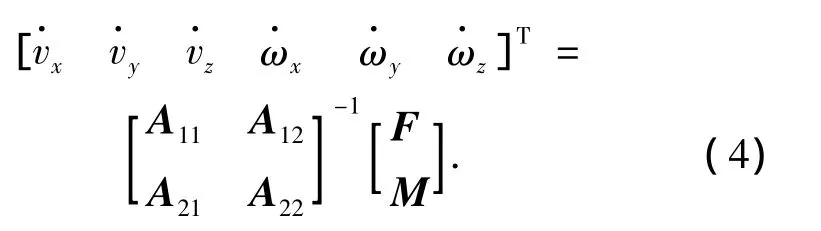
式中:F為翼傘系統所受力的總和,M為作用在翼傘系統所有力矩總和,A11為真實質量和附加質量,A22為真實的轉動慣量和附加轉動慣量,A12=-為耦合項.可表示為
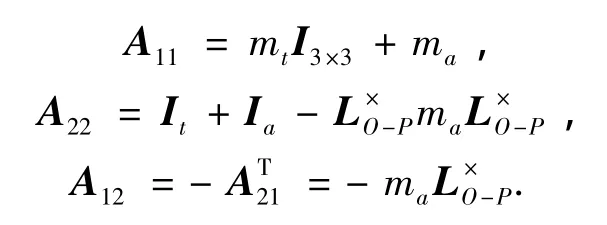
式中:It為翼傘系統的真實轉動慣量,Ia為翼傘系統的附加轉動慣量,mt為翼傘系統的總質量(包括傘衣、傘繩、吊帶和空投物等),ma為翼傘的附加質量,I3×3為單位矩陣,L×O-P為旋轉矩陣.
聯立方程(1)~(4)求解,可得到翼傘系統的運動狀態方程.
2 翼傘系統航跡跟蹤制導器
2.1 航跡跟蹤制導器的作用
翼傘系統的航跡跟蹤可分為航向制導器和航向控制器2部分.
根據微網的控制方式,當微網和主網并聯運轉時,超導磁場儲能技術通過PQ控制方法,將有功與無功功率設定為零;若微網處在孤島運轉狀態時,超導磁場儲能技術可轉變現有控制策略,轉換為恒壓恒頻控制方法,進而保障微網孤島運轉過程中的電位與頻率的穩定性,從而保障超導磁場儲能技術下的實時調控和微網孤島運轉下的供電質量。超導磁場儲能技術下的電磁儲能架構如圖3所示。
航向制導器將翼傘系統的當前位置與期望的航跡之間進行比較運算,計算出偏差,以調整翼傘系統的航向,從而消除航跡的偏差,使得翼傘系統的實際航向不斷逼近期望航向.
2.2 橫向軌跡誤差法
橫向軌跡誤差法,可根據自身位置誤差不斷調整,使受控對象達到期望的目標位置[11].可做如下描述:
定義(xr(i),yr(i))與(xr(i-1),yr(i-1))分別為當前路徑點和前一個路徑點,(x(t),y(t))為翼傘系統當前位置.如圖5所示.
令
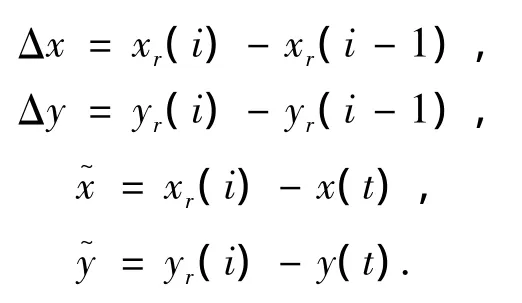
定義航跡線長度為第i-1到第i個路徑點之間的距離,表達式如下:
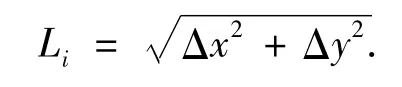
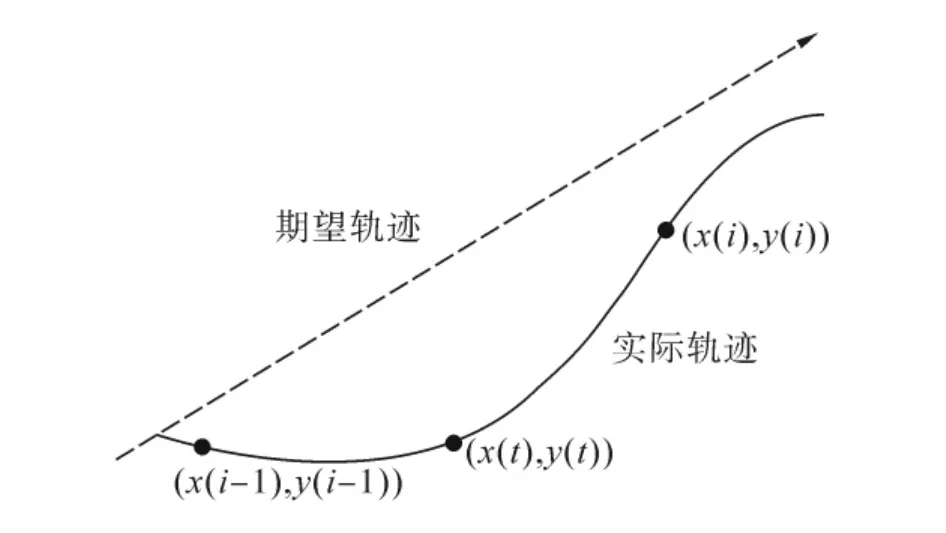
圖5 翼傘系統實際軌跡與期望軌跡Fig.5 The actual and desired traces of the parafoil
3 翼傘系統航跡跟蹤控制器
航向控制器用于控制翼傘系統的航向,使得翼傘系統在給定的航向指令下運動.
3.1 廣義預測控制
廣義預測控制(generalized predictive control,GPC)是Clark等在1987年提出,采用了長時段的優化性能指標,并結合辨識和自校正機制,表現出良好的魯棒性[12].
由于CARIMA模型比較接近實際對象特性,且具有積分作用,因此它不僅能為自校正魯棒控制器的設計奠定良好的基礎,而且能有效地消除系統的靜態偏差.
用CARIMA模型將系統表示為如下形式:
A(z-1)y(k)=B(z-1)u(k - 1)+C(z-1)ξ(k)/Δ.式中:y(k)、u(k)、ξ(k)分別為系統輸出、輸入及干擾信號,A(z-1)、B(z-1)、C(z-1)分別是 n、m 和 n 階的 z-1的多項式,Δ =1 - z-1.
如果系統時滯大于零,則B(z-1)多項式開頭的一項或幾項的系數等于零,為了簡單起見,令C(z-1)=1.z-1是z變換的逆算子,稱為后移時間算子.有:

式中:na和nb為翼傘系統需要辨識的階數.
為得到y(k)的j步向前預測值y(k+j),引入式(6)的丟番圖方程:

式中:Ej和Fj為待求多項式,并且有:
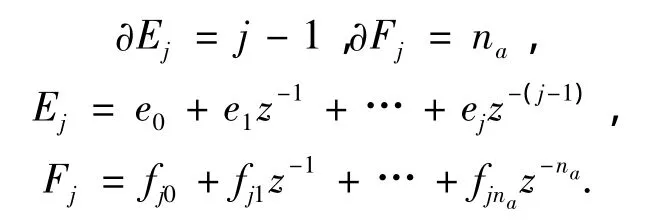
將式(5)兩邊同乘 EjΔzj可得

將式(7)代入式(6)得

得到未來輸出y(k+j)的預測值:

為將EjBΔu(k+j-1)中已知信息和未知信息分離開來,引入式(9)丟番圖方程:

式中:Gj和Hj為待求多項式.用遞推算法可以解得Ej、Fj、Gj、Hj,N 為預測步長.
目標函數為
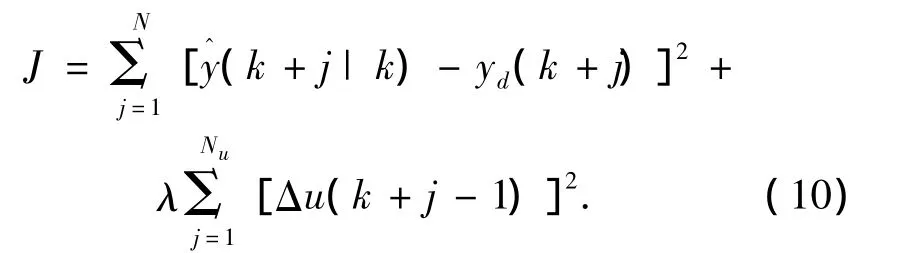
式中:Nu為控制步長,且Nu≤N.λ≥0為控制加權因子.yd(k+j)是柔化后的設定值序列,滿足:

式中:0<α≤1為柔化因子,yr是當前設定值.
將預測方程(8)代入式(10),并優化求解得Δu(k),由此可得到當前k時刻的控制量:

依據廣義預測控制的求解過程[12,14-15],可以得到預測控制量u(k),u(k)即為翼傘的單側下偏量,u(k)的改變,可以使得式(4)中的力F和力矩M發生變化,進而使得式(4)中的變量改變,即翼傘的航向產生偏轉,從而實現對翼傘的航向進行控制.
3.2 模糊控制
模糊邏輯在人類的思維和語言交流中普遍存在,經過幾十年的發展和研究發現將模糊邏輯應用于自動控制領域,能夠體現良好的魯棒性和控制性能[13].
對系統做如圖6的劃分,橫坐標為翼傘的偏航角 ψ、偏航角誤差 ψe、偏航角誤差的變換率 Δψe以及u(k),為直觀起見單位為度(°).每個變量均劃分為5個模糊等級.如圖 6所示,NB為負大(negative big),NS為負小(negative small),ZE 為零(zero),PS為正小(positive small),PB 為正大(positive big).
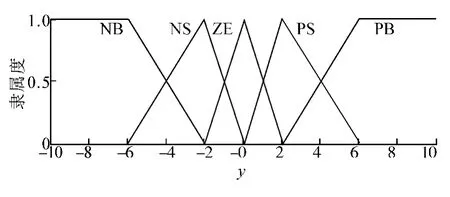
圖6 各變量的隸屬度函數Fig.6 Membership function of variables
建立如表1所示的期望的翼傘動力學規則表,其中,ψ(k-1)為前一時刻航向角值,ψe(k-1)為前一時刻航向角跟蹤軌跡誤差值為期望的偏航角誤差變化率.
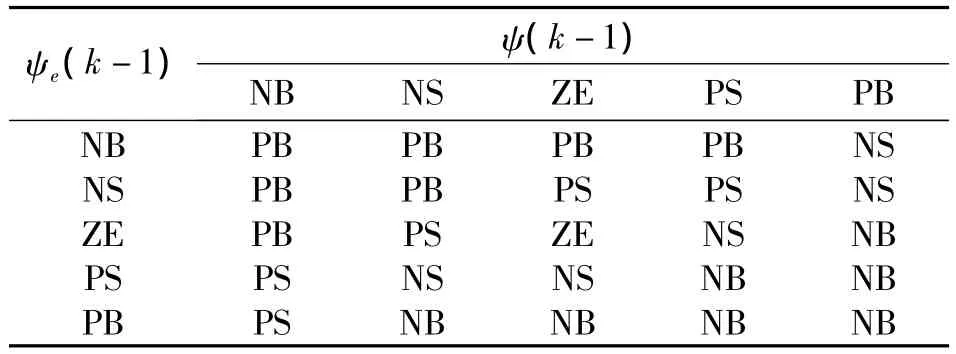
表1 期望的翼傘系統動力學規則Table 1 Desired dynamic rules of the parafoil system
建立如表2所示的翼傘動力學規則表,其中,ψe(k-1)為前一時刻航向角跟蹤軌跡誤差值,Δψe為航向角跟蹤軌跡誤差的變化率.
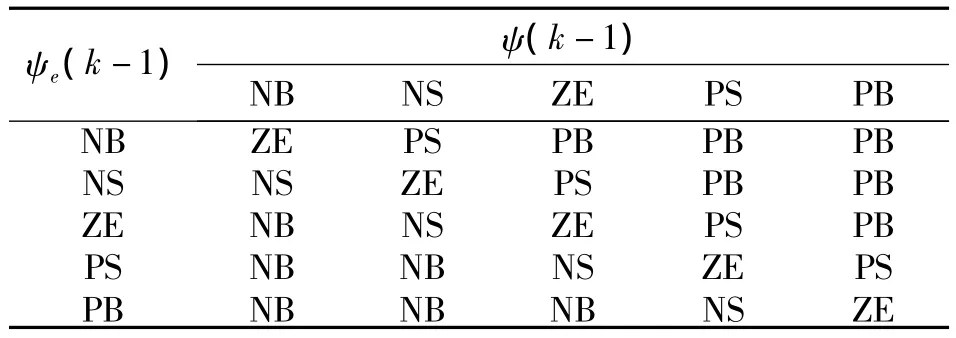
表2 翼傘系統動力學規則Table 2 Dynamic rules of the parafoil system
根據翼傘系統的動力學模型以及期望的動力學規則表,計算控制量的模糊規則,即

每個變量被劃分為5個模糊等級,則需要求取25條控制規則.具體步驟為:
1)根據(ψ(k-1),ψe(k-1)),在表1中查找相應的.2)令 Δψe=Δψ*e,在表 2中根據(ψ(k-1),ψe(k-1))查得相應的u(k).此時,有3種情況需要考慮:
①根據(ψ(k-1),ψe(k-1))可以得到惟一相對應u(k),此時,即為控制量;
②根據(ψ(k-1),ψe(k-1))可以得到多個相對應的u(k),即u(k)不惟一,此時需選取最小的u(k)值作為控制量,以減少電機等控制部件的能量損耗;
③根據(ψ(k-1),ψe(k-1))無法找到相對應的u(k),此時需取u(k)的最接近解,如果有多個解與之接近,則按情況②中所述,選取最小值為控制量;
依據上述規則,對控制量u(k)建立如表3中的模糊規則.
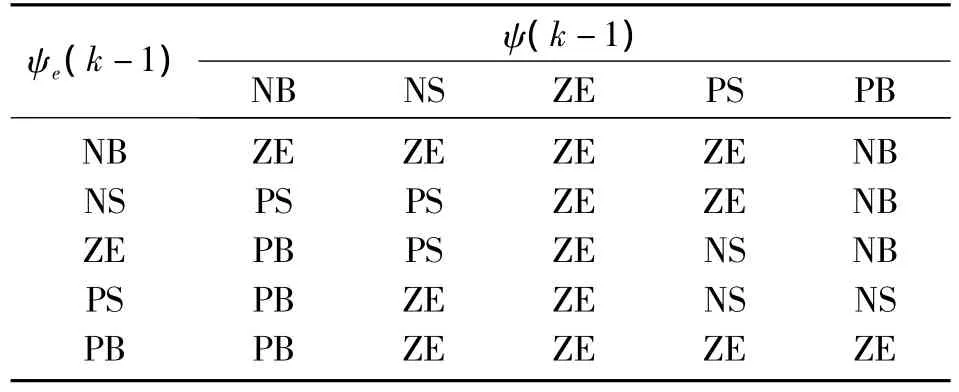
表3 控制量u(k)的模糊規則Table 3 Fuzzy rules of u(k)
3.3 翼傘系統航跡跟蹤控制策略
預測控制能夠有效地克服系統滯后、可應用于開環不穩定非最小相位系統.但預測控制在運算過程中需要解Diophantine方程、矩陣求逆以及最小二乘法的遞推求解,從而使得計算量較大[16].
在翼傘航跡追蹤控制的過程中,設計控制器采用模糊控制與預測控制控制兩者相互切換.在偏航角誤差較大時使用模糊控制,利用模糊控制運算速度快、魯棒性好的特點,將航跡誤差迅速調整至較小的范圍.以此減少單純使用預測作為控制器在跟蹤過程中的計算量.
圖7為控制模式切換流程.在翼傘充滿后,系統完成初始化,對翼傘航跡開始定位跟蹤.判斷偏航角誤差大于設定值后,控制器切換至運算速度較快的模糊控制器.在偏航角誤差相對較小的時候,控制器切換至預測控制,對翼傘航跡進行精確控制.在翼傘偏航角誤差較大的階段,不必再進行繁雜的計算,從而節省運算器的運算時間,提高控制效率.
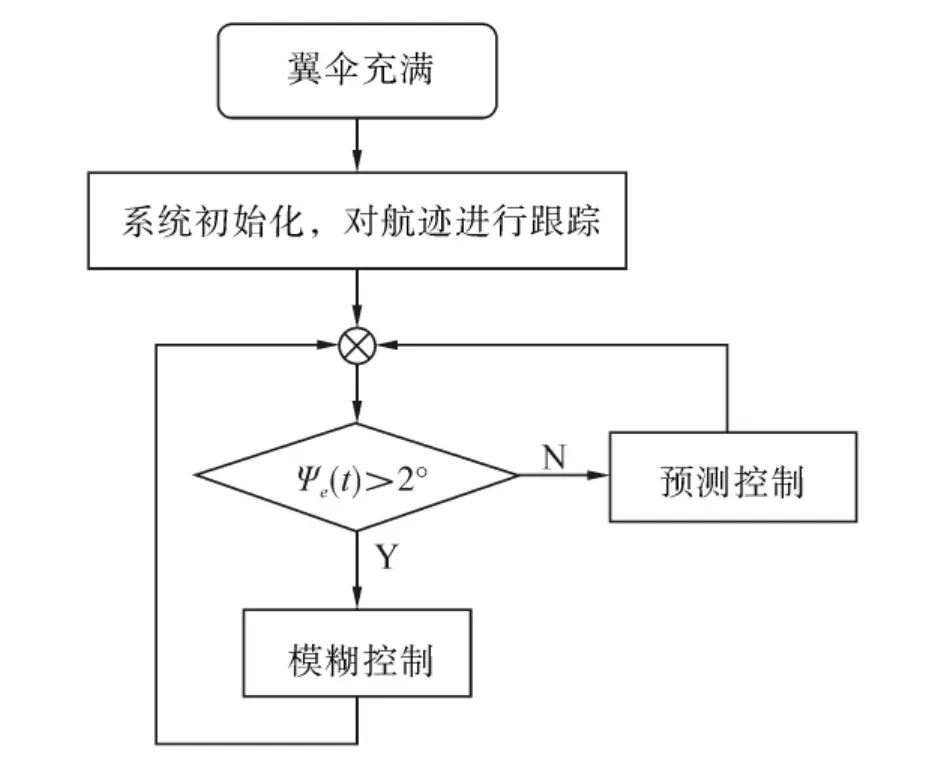
圖7 翼傘系統切換模式控制流程Fig.7 Flow chart of the switching mode control of the parafoil system
4 仿真分析
仿真模型選取的翼傘系統基本參數為展弦比AR=1.73,傘衣面積 SP=22 m2,傘繩長度 Ll=3.7 m,安裝角 φ =7°,吊帶長度 Lw=0.5 m,空投質量mW=80 kg,空投物阻力特征面積SW=0.5 m2.
翼傘系統的 CARIMA模型參數取:na=3,nb=5,N=5,Nu=1,控制加權系數 λ =1,柔化系數α =0.3.翼傘初始航向 ψ(0)=0.
期望航跡為(0,0)到(500,500)的一條直線以及以(500,500)、(800,500)、(800,800)、(500,800)為頂點的矩形,如圖8中斜線和矩形組成的圖形所示.

圖8 慣性坐標系下無擾動時翼傘系統軌跡跟蹤Fig.8 Path tracking of the parafoil system without disturbance
采用單純預測控制的翼傘航跡跟蹤路徑為圖8中虛線所示.采用切換控制模式的翼傘航跡跟蹤路徑為圖8中實線所示.可以看到采用切換模式控制的翼傘系統在偏航角誤差較大時,能使航跡更快趨向于期望航跡.
圖9為翼傘系統航跡跟蹤過程中的電機控制量,可以看到,采用切換模式電機控制量要小于預測控制模式.
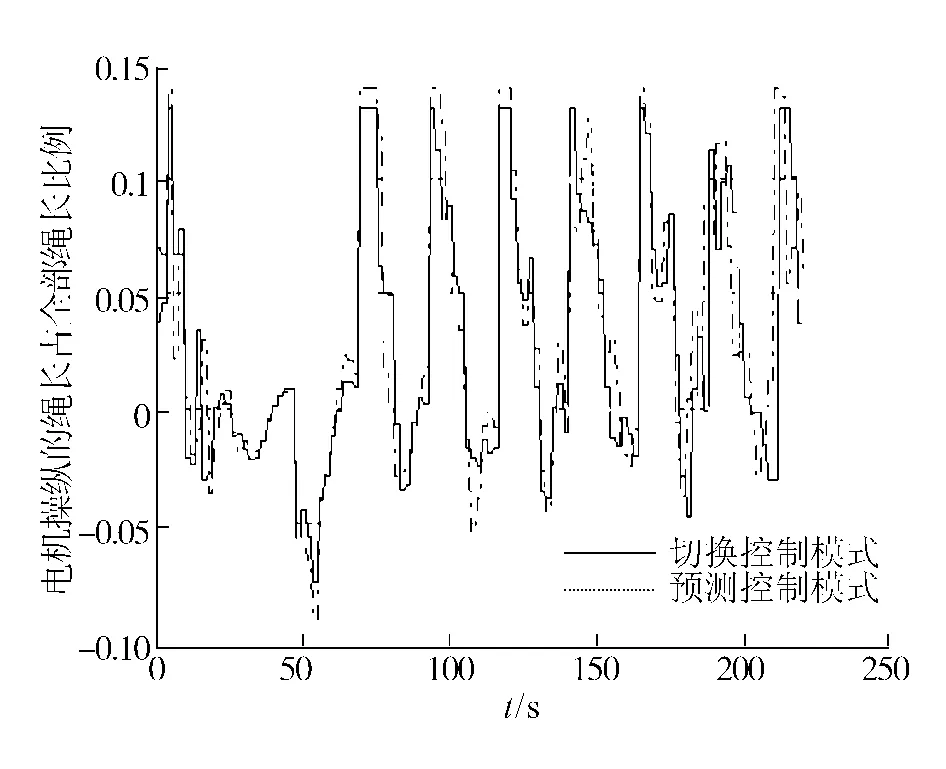
圖9 無擾動時翼傘系統電機控制量Fig.9 Motor control quantity of the Parafoil system without disturbance
圖10中期望軌跡與圖8相同.圖10、11為在y軸方向加入幅值為4 m/s的隨機擾動下,翼傘系統的軌跡跟蹤情況和電機控制情況.可以看到在有擾動的情況下控制方案仍然有效,且切換模式的控制效果優于單純使用預測控制模式.
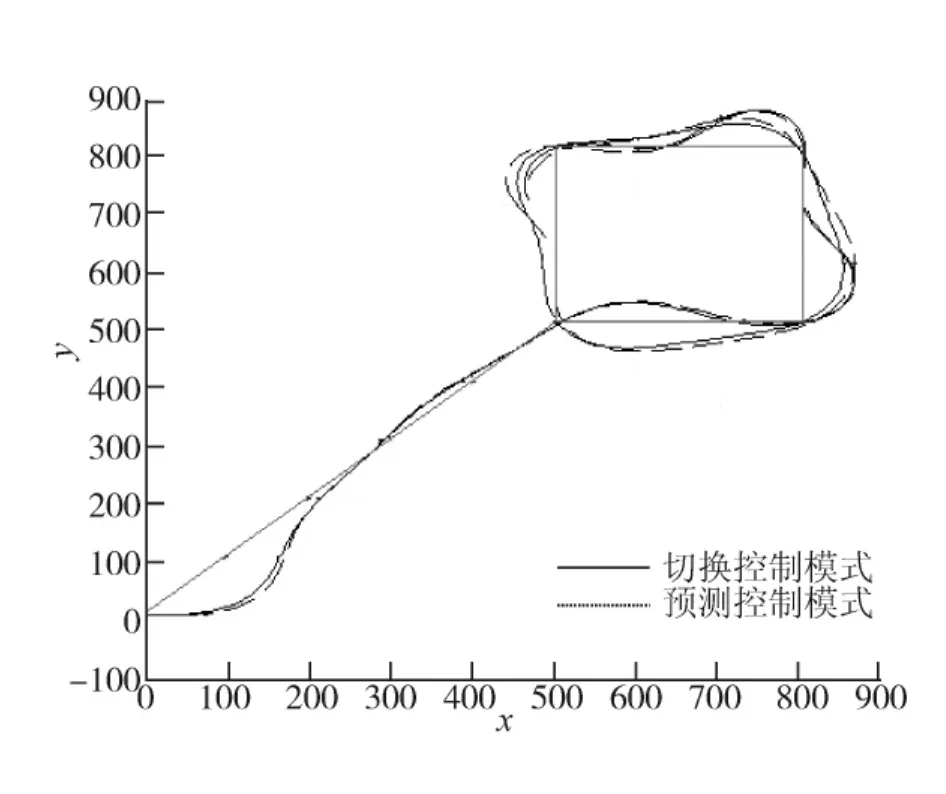
圖10 慣性坐標系下有擾動時翼傘系統軌跡跟蹤Fig.10 Path tracking of the parafoil system with disturbance
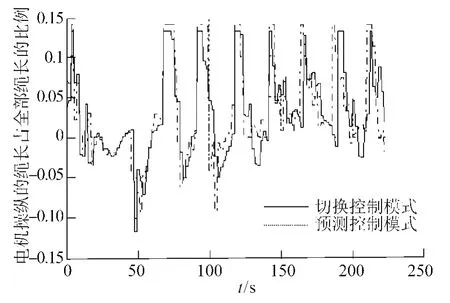
圖11 有擾動時翼傘系統電機控制量Fig.11 Motor control quantity of the parafoil system with disturbance
5 結束語
對切換控制模式下翼傘系統航跡跟蹤控制進行建模和仿真之后,分別比較了無擾動和有擾動情況下,切換模式和單一預測控制方式下翼傘跟蹤給定航跡的情況.
可以看到,在無擾動的情況下,翼傘系統能較好地跟蹤給定的軌跡,并且電機的控制量相對于單一使用預測控制時要小.在增加了隨機干擾之后,采用切換模式的翼傘系統仍能對軌跡進行較好地跟蹤,電機控制量也相對要小一些,提高了系統的快速響應,也縮短了調節時間,顯示出較好的穩定性和魯棒性.
在偏航角誤差較大時,運用模糊控制比使用預測控制更快地趨向于期望軌跡.同時,采用模糊控制階段,無需進行Diophantine方程計算、矩陣求逆以及最小二乘法的遞推求解,在一定程度上減少了運算器的計算量.
[1]熊菁.翼傘系統動力學與歸航方案研究[D].長沙:國防科技大學,2005:1-7.XIONG Jing.Research on the dynamics and homing project of parafoil system[D].Changsha:National University of Defense Technology,2005:1-7.
[2]秦子增,葛玉君.可控翼傘飛行轉彎控制性能仿真初步研究[J].宇航學報,1993(1):89-96.QIN Zizeng,GE Yujun.Preliminary simulation of flight turn performance of controllable parafoil systems[J].Journal of Astronautics,1993(1):89-96.
[3]史獻林,余莉.翼傘空中回收系統的研究及其進展[J].航天返回與遙感,2008,29(1):1-5.SHI Xianlin,YU Li.The study and development of the parafoil mid-air retrieval system[J].Spacecraft Recovery & Remote Sensing,2008,29(1):1-5.
[4]吳兆元.美國X-38計劃于翼傘返回系統[J].航天返回與遙感,2000,21(4):7-13.WU Zhaoyuan.X-38 CRV and parachute recovery system[J].Spacecraft Recovery & Remote Sensing,2000,21(4):7-13.
[5]STEIN J M,MADSEN C M,STRAHAN A L.An overview of the guided parafoil system derived from X-38 experience[C]//18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar Arlington.Munich,Germany,2005:516-529.
[6]PETRY G,BEHR R.The parafoil technology demonstration project:lessons learned and future visions[C]//14th AIAA Aerodynamic Decelerator Systems Technology Conference.Munich,Germany,1999:AIAA-99-1755.
[7]SOPPA U,STRAUCH H.GNC concept for automated landing of a large parafoil[C]//14th Aerodynamic Decelerator Systems Technology Conference and Seminar.San Francisco,USA,1997:AIAA-97-1464.
[8]焦亮.基于翼傘空投機器人系統的自主歸航研究[D].天津:南開大學,2011:34-40.JIAO Liang.Research on autonomous homing based on parafoil and air-dropped robot system[D].Tianjin:Nankai University,2011:34-40.
[9]蒲志剛,李良春,唐波.翼傘系統分段歸航方向控制方法[J].四川兵工學報,2009,30(10):117-119.PU Zhigang,LI Liangchun,TANG Bo.The direction control of the parafoil system's multiphase trajectory[J].Journal of Sichuan Ordnance,2009,30(10):117-119.
[10]郭叔偉,董楊彪,秦子增.物傘系統動力學模型和討論[J].航天返回與遙感,2008,29(3):38-44.GUO Shuwei,DONG Yangbiao,QIN Zizeng.Dynamic model and discussion of the parachute and payload system[J].Spacecraft Recovery & Remote Sensing,2008,29(3):38-44.
[11]KANG Y,HEDRICK J K.Linear tracking for a fixed-wing UAV using nonlinear model predictive control[J].IEEE Transactions on Control Systems Technology,2009,17(5):1202-1210.
[12]CLARKE D W,MOHTADI C,TUFFS P S.Generalized predictive control-part I:the basic algorithm[J].Automatica,1987,23(2):137-148.
[13]李國勇.智能控制及其Matlab實現[M].2版.北京:電子工業出版社,2010:163-165,216-219.
[14]王偉.廣義預測控制理論及其應用[M].北京:科學出版社,1998:205-233.
[15]李少遠.工業過程系統的預測控制[J].控制工程,2010,17(4):407-415.LI Shaoyuan.Model-based predictive control for industrial process-a survey[J].Control Engineering,2010,17(4):407-415.
[16]李桂秋,陳志旺.基于跟蹤誤差調節的模糊直接廣義預測控制[J].計算機應用研究,2012,27(3):1009-1011,1014.LI Guiqiu,CHEN Zhiwang.Fuzzy direct generalized predictive control based on tracking error adjustment[J].Application Research of Computers,2012,27(3):1009-1011,1014.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32