基于HMCD的仿人機器人單杠運動控制策略
2012-11-26 01:50:20陳雯柏高世杰吳細寶
智能系統學報 2012年6期
陳雯柏,高世杰,吳細寶
(北京信息科技大學自動化學院,北京100192)
國際仿人機器人奧林匹克競賽(International Humanoid Robot Olympic Games,IHOG)是將小型仿人機器人作為運動員,借助人類奧林匹克競賽規則進行的和人類奧林匹克并齊的另一類國際性競技娛樂活動.其目標是借助人類奧林匹克的魅力和挑戰性來促進仿人機器人關鍵技術的研究和發展,最終實現“無處不在”的機器人時代[1].
仿人機器人完成如人類舞蹈、體育運動等復雜而靈活的動作,可通過求解運動解析方程并獲得運動軌跡來完成全身動作的設計,但該方法難度極大,還可能存在無解的情況.目前,基于人體運動數據(human motion capture data,HMCD)的復雜動作設計方法,逐漸成為仿人機器人動作設計的有效手段之一[2-6].文獻[3-4]提出了人體動作特征符號的捕捉、建立運動模式數據庫進行動作模式劃分、匹配人體動作關鍵幀的仿人機器人動作生成方法.文獻[5]采用捕捉人體舞蹈動作、滿足機器人的關節與運動約束的解決方法,并以此生成仿人機器人動作.文獻[6]采用仿人機器人復雜動作設計中人體運動數據提取及分析方法,在仿人機器人BHR-2上完成了刀術表演實驗.文獻[7]基于運動相似性原理提出了一種仿人機器人前向倒地動作的設計方法.
本文根據IHOG單杠比賽技術要求,提出基于HMCD的控制策略,成功完成了仿人機器人單杠運動控制.
1 IHOG單桿運動的技術要求
如圖1所示,IHOG單桿比賽是基于單個機器人的杠上動作表演,一次表演為1 min.該項目主要考驗機器人對單杠運動(旋轉、彎腿、倒立等)復雜動作的規劃能力及程序化的控制能力.
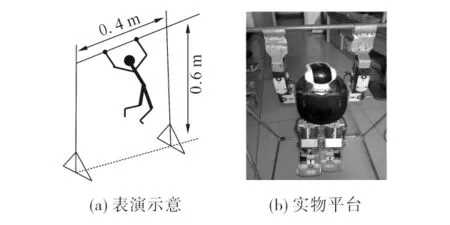
圖1 機器人單杠運動Fig.1 Humanoid robot on a horizontal bar
IHOG單桿比賽過程要求機器人能完成所有指定的5種基本動作:搖擺爬杠、倒立、360°正向或反向旋轉、360°反向旋轉、彎腿.滿分為100分,其中每種動作20分;如果還能完成具有懸念的高難度動作(如連續旋轉3次以上)則額外加分.該項目的控制要求不是一種量或幾個量的一種簡單變化,而是一個高度非線性系統的一系列復雜行為的控制,并且其活動銜接關系具有很強的時間性.
2 IHOG單桿運動動力學分析
單杠機器人要完成上述搖擺爬杠、倒立、正向或反向旋轉、360°反向旋轉、彎腿上杠等動作的控制是相當復雜的,其任務涉及到多個控制量與被控量的協調控制.這正是近年來國內外出現的關于欠驅動機器人的研究工作[8-10].非驅動關節的研究是實現仿人機器人高效、自然而優美的運動的關鍵.圖1(b)為采用16自由度的Metal Fighte-1型仿人機器人構建的IHOG單桿比賽實物平臺.為完成上述工作,欠驅動單杠機器人可建立為雙關節或三關節的Acrobot的模型[9].
2.1 雙關節Acrobot的數學模型
雙關節Acrobot的數學模型具有2個自由度,髖關節為驅動關節,手關節可自由運動.該模型不足以表現人體的單桿動作.單杠運動中,肩關節起很大的主動控制作用,它和髖關節協調配合可準確模仿人的單杠動作.顯然,2個關節的模型無法模仿人在單杠運動中的復雜動作,只能簡單搖擺.
2.2 三關節Acrobot的數學模型
三關節欠驅動Acrobot的數學模型中,手部關節為自由鉸接,肩關節和髖關節都是驅動關節.手部可做完全不受限的旋轉,角度范圍為(0,2π),肩關節和骸關節不能做完整的旋轉.有3個自由度但只有2個驅動關節,這是一類具有二階非完整約束的欠驅動機械系統,通過協調控制三關節體操機器人的2個關節,可模擬人的體操動作.文獻[10-11]給予了分析與研究.為方便后文說明,這里僅對單杠運動的上杠動作,進行簡要動力學分析,如圖2所示.
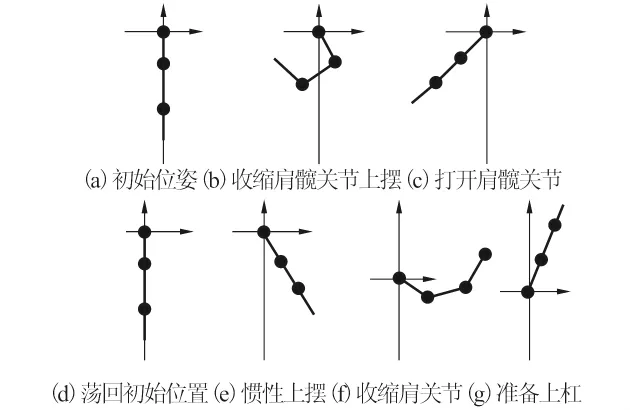
圖2 單杠機器人擺起動作Fig.2 Swing-up action of humanoid robot
圖2(a)為初始位姿,θ1= π,θ2=0,θ3=0,以逆時針方向為正,同時給肩關節和髖關節一較小正向加速度a,二桿和三桿將獲得向左的動能.
以一桿為參照系,當θ2>α時(α為設定的經驗角度,如2(b)所示,)再給定2個關節一個與a1大小相當的控制命令-a1±δ1,兩關節開始做負向加速運動.若此時再給定2個關節一個與a1大小相當的控制作用a1±δ2,則二桿和三桿開始減速,肩關節和髖關節逐漸打開,系統進入如圖2(c)所示狀態:θ2=0,θ3=0.
基于機器人物理結構,髖關節無法大幅度反向轉動.系統將在重力作用下,由圖2(c)狀態過渡到圖2(d)、圖2(e).由于手關節摩擦,圖2(d)點能量小于圖2(c)點(Ed<Ee).此時應通過收縮肩關節和髖關節(如圖2(f)所示),縮短系統重心到手關節的力臂,減小系統轉動慣量,以減少系統從圖2(d)狀態 θ1=π,θ2=0,π3=0 擺起到 θ1=0,θ2=0,θ3=0倒立狀態所需的能量.如圖2(g)所示,當θ1逐漸減小接近倒立狀態時,打開肩關節和髖關節,機器人可過渡到 θ1=0,θ2=0,θ3=0 狀態,擺起過程結束.
3 基于HMCD仿人機器人復雜動作設計
如2.2節所述,上述單杠運動要求在一定時效內從外部獲得數據并做出迅速響應.大量實時數據處理,對單杠機器人的性能要求非常高,圖2所示實物平臺無法滿足.為此,本文提出基于HMCD的控制策略實現仿人機器人單杠運動控制策略.
基于HMCD的仿人機器人的運動規劃流程如圖3所示.該方法可避開復雜動力學計算,通過對人類運動數據分析與修正,可得到各主要關節角度變化軌跡.根據力學相似性原理,這些函數關系可進一步推廣到關節變化來規劃步態,從而實現機器人的仿人運動[4].
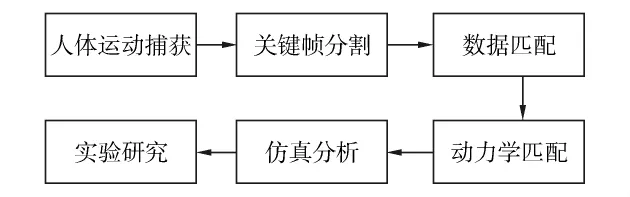
圖3 基于HMCD的仿人機器人的復雜動作設計流程Fig.3 Design procedure of humanoid complicated motion based on HMCD
3.1 三維人體骨骼模型
人體通過400對肌肉收縮驅動關節運動,但對仿人機器人來說,控制400對“人造肌肉”這樣多的多變量系統幾乎是不可能的.只考慮基本動作,人體骨骼可視為一系列通過關節連接的剛性連桿機構,其中包含了16個關鍵點(三維特征點)[12].
3.2 運動捕獲
人體運動分析是從視頻中獲取人體運動信息,并加以分析、識別與利用.運動捕獲用于仿人機器人復雜動作設計的基本思想是:利用人體運動姿態是相鄰肢體間不同空間角度的組合特性.這樣,通過光運動捕捉一系列基本動作(關鍵幀)特征點的空間坐標,就可得到有用的關節角數據.文獻[5]稱關鍵幀的停頓姿勢為關鍵姿勢,相鄰2個關鍵姿勢之間的過渡動作為“基段”.關鍵幀體現了這個運動的基本特征,可能會在整個動作行為中重復,圖2所示即是本文單杠機器人在擺起動作設計中采用的幾個關鍵幀.
3.3 數據匹配
利用三維人體骨骼模型,以人的相應關節點的絕對坐標與機器人簡化模型坐標進行比較,使用關節節點的絕對空間坐標,通過逆運動學求解可以計算出每一個仿人機器人的關節角度.由于機器人模型和人體模型存在著運動學約束差異,關節角度數據不能直接應用于仿人機器人,還需經過動力學匹配處理.若匹配后數據符合機器人動態穩定性條件,則可用來驅動仿人機器人完成穩定運動.
對于步行這類運動,地面接觸條件是與穩定性要求一樣嚴格的.對于本文考慮的單杠運動,手臂的末端效應是一個自由的空間.運動學約束的關節角度范圍主要考慮避免在不同的肢體之間的干擾程度.在這種情況下,捕捉到的數據將通過仿真分析后轉換進行實物機器人實驗.
3.4 動作合成
運動學匹配和穩定性調節完成后,需要進行的是機器人運動軌跡獲取.機器人復雜的動態運動是由上肢和下肢的基本動作構成,它是任意2個基本關鍵姿勢的一種過渡.雖然關鍵姿勢值得研究,但基本動作之間的銜接不順暢也不能確保順利完成復雜的動作.
本文采用三次樣條插值方法來有效解決這個問題.如果θi表示在時刻i的關節旋轉角度,θi+1表示在下一時刻i+1時的旋轉程度.在整個過渡過程中,關節旋轉的角度θ(t)可以通過式(1)得到:

顯然,角速度θi'可表示為

如果 θi在[ti,ti+1]是處處可微,那么這個銜接曲線是光滑的.當然,這是一個容許控制問題,角度θt和角速度 θt'必須限制在一個可以實現的范圍內[13].
4 仿人機器人單杠運動的實現
4.1 仿人機器人平臺
圖1(b)所示MF-1型機器人身高31 cm,腿長18 cm,臂長15 cm,帶標準電池時重量為1.3 kg.機器人的結構比率與人體身高體重比率比較接近,具體如表1所示.
表2與表3分別給出了MF-1型機器人的相關關節自由度配置與性能參數.

表1 MF-1型仿人機器人身體比率Table 1 Body ratio of MF-1 humanoid robot %
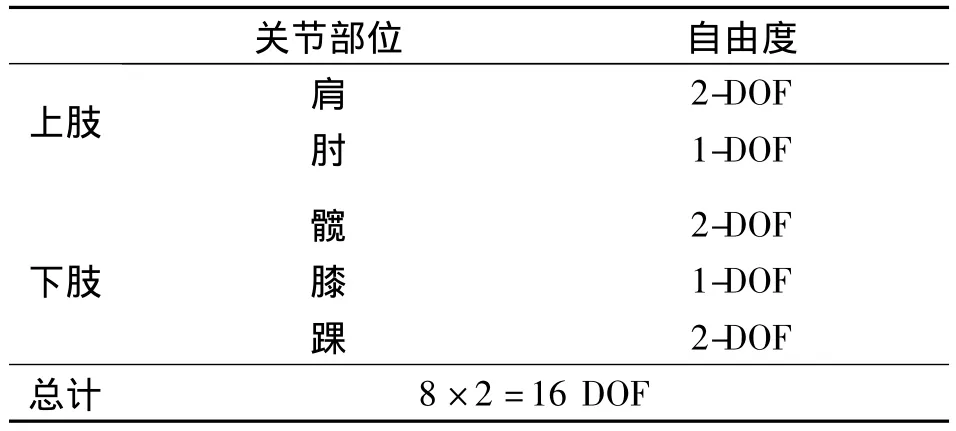
表2 型仿人機器人各關節自由度配置Table 2 Freedom configuration of MF-1 humanoid robot
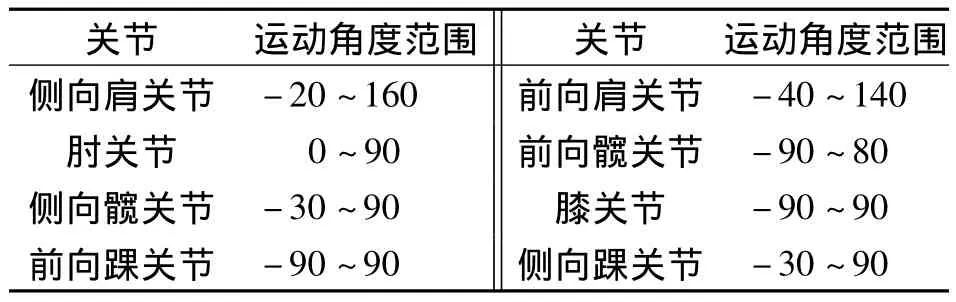
表3 MF-1型類人機器人各關節參數Table 3 Parameters of MF-1 humanoid robot (°)
4.2 基于3-DMAX環境機器人的建模與運動仿真
3-DMAX作為用戶群最大的三維制作軟件,廣泛應用于影視廣告、建筑效果圖制作與游戲設計等領域,本文采用它進行機器人單杠動作仿真模擬.
3-DMAX中,骨骼系統用來模擬骨骼各種運動,父子關系是一種模型間關系,父對象的運動可以帶動子對象運動,而子對象的運動卻不能影響父對象的運動.對于3-Dmax動畫建模骨骼系統比較適合模擬生物的運動特點,而父子關系則適合用于體現機械運動的特點.
基于第3節思想與仿人機器人平臺參數,圖4建立了MF-1型機器人簡化模型,它具有與實體相同的自由度數目、關節結構和骨骼長度.建模時采用了層次結構,這反映了關節間的耦合關系.使用massfx將仿人機器人單杠模型轉化為剛體,并設定各個部位的質量等參數,重新生成單杠和機器人的手部物理網格并將手部網格的洞放置在單杠上.
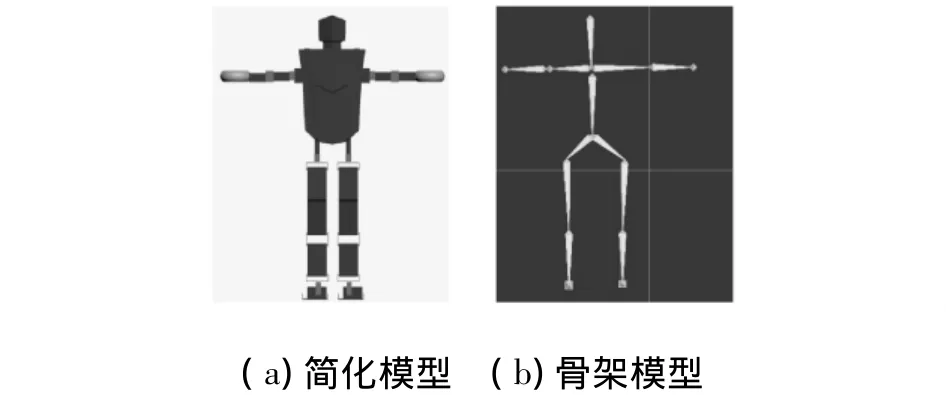
圖4 MF-1型機器人簡化模型和骨架結構Fig.4 Swing-up action of humanoid robot
為了讓這個模型能夠達到和所使用的機器人有同樣的運動特征,需要為這個模型的各個部件加上父子關系.建立的父子關系鏈接的模型體現了機器人的16自由度的特點,并能通過移動模型的各個關節點來真實體現機器人的運動規律.
將人體單杠視頻中第1幀作為準備動作,經歷20幀達到完全收腹,再經歷14幀到達豎直向下位置并且有向右的速度,再經歷16幀的自由運動達到勢能最高處.圖5給出了基于HMCD的控制策略中的運動員擺動的關鍵姿勢和MF-1型機器人簡化模型的相似動作.
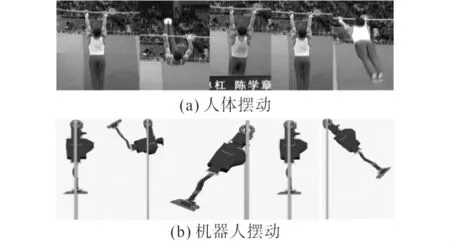
圖5 人體擺動與MF-1型機器人模型擺動關鍵姿勢Fig.5 Swing-up key frames of the actor and the humanoid
圖6為使用3-Dmax分別輸出的機器人髖關節和肩關節的關節角軌跡.關節角軌跡平滑連續,說明數據可用.圖中加粗實點表示軌跡變化過程中的關鍵姿態.

圖6 髖關節與肩關節轉角3-Dmax仿真曲線Fig.6 Angle simulation curve of hip and shoulder in 3-Dmax
4.3 單杠機器人實物運動實驗
根據圖6關節角軌跡,對關節角按表3中數據加以限制,同時在角度變化劇烈時,適當放慢節奏,本文成功實現了單杠機器人的擺動上杠運動,其關鍵幀如圖7所示.機器人實物運動與人體動作非常接近,關節角軌跡也基本一致.采用與擺動類似的方法實現單杠機器人的連續正向(前翻)與反向旋轉(后翻)等動作,這里不再贅述.

圖7 MF-1型單杠機器人實物運動實驗Fig.7 Physical experiment of MF-1 humanoid robot
5 結束語
分析了欠驅動單杠機器人Acrobot模型,并根據IHOG技術要求、實物機器人本體結構和自由度配置,提出了基于HMCD的仿人機器人單杠運動控制策略.通過視頻分析人體單杠運動數據,根據仿人機器人模型分析關鍵特征點、基本動作的運動數據得到的關鍵幀的關節角數據,經過適當的運動學約束調整,基于3-Dmax仿真環境,采用插值方法生成了仿人機器人的運動軌跡.在MF-1仿人機器人單杠實物平臺上進行控制實驗的成功,驗證了該方法的有效性.
[1]張利格,畢樹生,高金磊.仿人機器人復雜動作設計中人體運動數據提取及分析方法[J].自動化學報,2010,36(1):107-112.ZHANG Lige,BI Shusheng,GAO Jinlei.Human motion data acquiring and analyzing method for humanoid robot motion designing[J].Acta Automatica Sinica,2010,36(1):107-112.
[2]TAKANO W,YAMANE K,NAKAMURA Y.Capture database through symbolization,recognition and generation of motion patterns[C]//Proceedings of IEEE International Conference on Robotics and Automation.Roma,Italy,2007:3092-3097.
[3]NAKAZAWA A,NAKAOKA S,IKEUCHI K.Matching and blending human motions using temporal scaleable dynamic programming[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.O-saka,Japan,2004:287-294.
[4]NAKAOKA S,NAKAZAWA A,YOKOI K,et al.Generating whole body motions for a biped humanoid robot from captured human dance[C]//Proceedings of IEEE International Conference on Robotics and Automation.Taipei,China,2003:3905-3910.
[5]張利格,黃強,楊潔,等.仿人機器人復雜動態動作設計及相似性研究[J].自動化學報,2007,33(5):522-528.ZHANG Lige,HUANG Qiang,YANG Jie,et al.Design of humanoid complicated dynamic motion with similarity considered[J].Acta Automatica Sinica,2007,33(5):522-528.
[6]柯文德,崔剛,洪炳镕,等.參數化優化的仿人機器人相似性前向倒地研究[J].自動化學報,2011,37(8):1006-1013.KE Wende,CUI Gang,HONG Bingrong,et al.Falling forward of humanoid robot based on similarity with parametric optimum[J].Acta Automatica Sinica,2011,37(8):1006-1013.
[7]HONG Bingrong,KE Wende.International huo olympic games and its key technology[J].Journal of Harbin Institute of Technology,2010,17(suppl.2):1-4.
[8]欒楠,明愛國,趙錫芳,等.含有非驅動關節機器人的學習控制[J].機器人,2002,17(3):7-10.,MING Aiguo,ZHAO Xifang,et al.Learning control for robot with unactuated joints[J].Robot,2002,17(3):7-10.
[9]何廣平,陸震,王鳳翔.欠驅動冗余度機器人運動優化控制[J].宇航學報,2002,21(6):17-31.HE Guangping,LU Zhen,WANG Fengxiang.Motion optimal control of under-actuated redundant robot arm[J].Journal of Astronautics,2002,21(6):17-31.
[10]李祖樞,張華,古建功,等.3關節單杠體操機器人的動力學參數辨識[J].控制理論與應用,2008,25(2):242-246.LI Zushu,ZHANG Hua,GU Jiangong,et al.Dynamic parameter identification of three-link acrobot on horizontal bar[J].Control Theory and Applications,2008,25(2):242-246.
[11]薛方正,郭億,李祖樞.三關節單杠體操機器人的建模與控制[J].控制與決策,2011,26(6):821-825.XUE Fangzheng,GUO Yi,LI Zushu.Dynamic model analysis for acceleration driven three-link acrobat[J].Control and Decision,2011,26(6):821-825.
[12]ZHUANG Yueting,LIU Xiaoming.3D human skeleton reconstruction from motion image sequence[J].Journal of Computer-Aided Design and Computer Graphics,2000,12(4):245-251.
[13]ZHONG Qiubo,HONG Bingrong,PAN Qishu.Design and implementation on humanoid robot based on roboBasic[J].Journal of Harbin Institute of Technology,2009,41(sup.2):28-32.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03