動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)
2012-12-01 02:11:52侯亞麗焦景欣
探測與控制學(xué)報 2012年6期
王 偉,李 崗,侯亞麗,焦景欣
(機電動態(tài)控制重點實驗室,陜西 西安 710065)
0 引言
現(xiàn)代戰(zhàn)場,由于紅外系統(tǒng)的廣泛應(yīng)用,戰(zhàn)場目標被熱紅外系統(tǒng)探測的可能性和受紅外制導(dǎo)武器攻擊的危險性越來越大[1];作為對抗熱紅外偵察和攻擊的有效手段,熱紅外偽裝技術(shù)得到了迅猛發(fā)展[2]。熱紅外偽裝技術(shù)的一項關(guān)鍵技術(shù)是建立通用的熱紅外隱身效能評價系統(tǒng),對于論證和研制紅外偽裝器材,正確實施戰(zhàn)場目標熱紅外偽裝具有十分重要的意義[3]。
美國、俄羅斯等軍備技術(shù)先進的國家在大力發(fā)展隱身技術(shù)的同時,也投入了大量的人力和物力,對隱身效果評估系統(tǒng)進行了大量的研究,并且應(yīng)用于新型隱身武器裝備的研制開發(fā)和隱身性能評估中[4-6]。國內(nèi)關(guān)于這方面的研究起步較晚,現(xiàn)有的測試評價系統(tǒng)大多是對靜止狀態(tài)下的目標進行的紅外輻射特性測試,主要采用兩種測試技術(shù)手段:一種是采用K型熱電偶、照度計、點溫計及數(shù)據(jù)采集器對坦克車輛紅外輻射特性進行測試與分析,獲取靜止的坦克在發(fā)動機工作或不工作兩種狀態(tài)下的紅外輻射特性[7],該測試系統(tǒng)并沒有考慮到在真實作戰(zhàn)環(huán)境下坦克目標在運動狀態(tài)與地面背景進行熱交換等相互作用帶來的影響。另一種是利用紅外成像裝置對目標和背景進行探測,形成紅外熱圖像,通過人眼對目標進行發(fā)現(xiàn)或識別,確定目標發(fā)現(xiàn)和識別概率[8],由于人為因素,這種技術(shù)手段獲得的結(jié)果具有很大的不確定性。因此,本文設(shè)計了一種利用光電自動跟蹤平臺,測試采集動態(tài)地面目標熱紅外圖像信息,通過后期圖像處理,得到目標隱身效能的動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)。
1 隱身效能測試基礎(chǔ)
1.1 光電自動跟蹤轉(zhuǎn)臺
光電自動跟蹤轉(zhuǎn)臺是集光、機、電與計算機應(yīng)用于一體的復(fù)雜系統(tǒng),是靶場測量設(shè)備、光電跟蹤測量設(shè)備、天文觀測設(shè)備、航空航天領(lǐng)域、激光通訊設(shè)備、光電捕獲跟蹤與瞄準設(shè)備等不可缺少的關(guān)鍵硬件系統(tǒng)[9]。跟蹤轉(zhuǎn)臺根據(jù)用途不同分為地平式、赤道式;地平式又分為U型結(jié)構(gòu)、T型結(jié)構(gòu)、球形結(jié)構(gòu)。其由精密跟蹤架、搭載設(shè)備、變焦距捕獲跟蹤電視系統(tǒng)、計算機控制與管理系統(tǒng)、測角系統(tǒng)、伺服系統(tǒng)、操作控制臺等部件組成。光電自動跟蹤轉(zhuǎn)臺是紅外熱像儀、激光測距機、捕獲電視的承載平臺;實現(xiàn)對目標的跟蹤與測量,并給出目標的俯仰和方位角。
1.2 紅外探測
紅外探測利用紅外系統(tǒng)來實現(xiàn)。紅外系統(tǒng)通常由光學(xué)鏡頭、紅外探測器、電子線路(信號處理系統(tǒng))、機械傳動裝置、制冷器和記錄或顯示設(shè)備(裝置)等構(gòu)成(見圖1)。目前,紅外系統(tǒng)多種多樣,而最常見的紅外系統(tǒng)是熱成像系統(tǒng),如紅外行掃儀、平臺用熱像儀、便攜式熱像儀、熱成像制導(dǎo)系統(tǒng)、測輻射計、搜索與跟蹤系統(tǒng)等[10]。
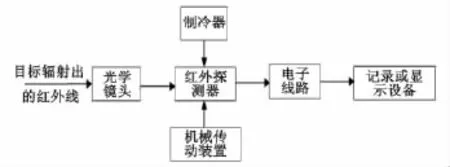
圖1 紅外系統(tǒng)原理示意圖Fig.1 Infrared system theory
紅外探測器是紅外系統(tǒng)的核心部件,它的性能決定紅外系統(tǒng)的好壞。紅外探測器是一種光-電或熱-電轉(zhuǎn)換器件,能使入射到它上面的紅外信號轉(zhuǎn)換成微弱的電信號。按照功能和原理不同,紅外探測器可分為點源式探測器和成像探測器兩大類。其中,點源式探測器只能探測紅外線的有無和強弱,而不反映目標的結(jié)構(gòu)和形狀。用于實戰(zhàn)的紅外探測器通常為紅外成像探測器,它不僅能探測到紅外輻射信號的強弱,而且能夠獲得紅外目標的圖像。
1.3 激光測距
激光測距是通過測量光在參考點和被測點之間的往返傳播時間,由簡單的運動學(xué)關(guān)系即可計算出目標和參考點之間距離的一種技術(shù)[11]。激光測距的基本原理如圖2所示。測距機由激光發(fā)射系統(tǒng)和探測系統(tǒng)組成(如圖中虛線框所示)。工作時,激光器發(fā)射激光,光束穿過大氣到達目標,經(jīng)目標反射后返回,并由探測器接收。測出從激光發(fā)射到反射光被接收所經(jīng)歷的時間,根據(jù)運動學(xué)中最基本的關(guān)系即可求出目標的距離。
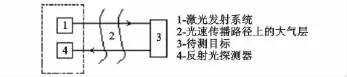
圖2 激光測距原理圖Fig.2 Laser range-find
2 動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)
2.1 系統(tǒng)構(gòu)成
動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)由光電自動跟蹤模塊、紅外熱像采集模塊、激光測距模塊和后期對采集的熱紅外圖像隱身效能分析評價軟件模塊構(gòu)成。本系統(tǒng)光電自動跟蹤平臺具體組成如圖3所示。
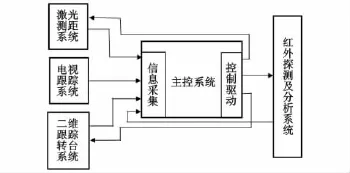
圖3 測試系統(tǒng)組成示意圖Fig.3 Test system structure
測試跟蹤模塊由光電自動跟蹤平臺、捕獲跟蹤電視系統(tǒng)和控制系統(tǒng)組成。捕獲跟蹤電視系統(tǒng)對視場內(nèi)的目標圖像進行識別和處理,實時給出目標脫靶量,由脫靶量參數(shù)通過控制系統(tǒng)實現(xiàn)跟蹤架對目標的平穩(wěn)跟蹤。控制系統(tǒng)承擔(dān)數(shù)據(jù)采集、信息管理和實時控制任務(wù)。紅外熱像采集模塊包括長焦距紅外光學(xué)系統(tǒng)、紅外熱像儀及其后的控制采集軟件。在電視跟蹤系統(tǒng)鎖定目標后,由主控計算機對紅外熱像采集系統(tǒng)發(fā)送工作指令,實現(xiàn)對視場內(nèi)的目標進行紅外成像測試采集,實時給出目標紅外熱圖。激光測距模塊由脈沖式激光測距系統(tǒng)及控制采集系統(tǒng)組成,對目標進行精確定位,并記錄距離信息。測量前要校準捕獲電視跟蹤系統(tǒng)光軸、熱像儀光學(xué)系統(tǒng)光軸和激光測距機光軸,嚴格保證三者同軸。
分析軟件模塊通過插值處理,對視頻數(shù)據(jù)和距離數(shù)據(jù)進行線性插值運算處理,使紅外熱圖數(shù)據(jù)的幀頻能一一對應(yīng)距離數(shù)據(jù)。而后利用對比測量評價方法,研究度量相同狀態(tài)涂裝隱身涂層前后目標與背景之間的紅外輻射特征對比度及目標的有效隱身效率,最終形成裝甲車輛動態(tài)隱身效能評價技術(shù)。
2.2 評價原理
動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)是針對現(xiàn)有評價系統(tǒng)僅對靜態(tài)地面目標或利用人眼進行隱身效能測試評價的缺陷,提出一種在真實作戰(zhàn)環(huán)境下,地面目標在運動狀態(tài)下的隱身效能測試評價的動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng),該系統(tǒng)避免了通過人眼識別而產(chǎn)生的較大不確定因素。
本測試系統(tǒng)是在研究目標特性的基礎(chǔ)上,利用集成的動態(tài)隱身效能測試平臺,通過形心、相關(guān)、邊緣跟蹤處理方式對動態(tài)地面目標進行捕獲跟蹤。該平臺具有記憶外推跟蹤功能,可實現(xiàn)捕獲目標后對目標的自動跟蹤。采用比對測量法(即分別對涂/未涂隱身涂層目標進行動態(tài)紅外隱身效能對比測試),對涂裝和未涂裝隱身涂層的地面目標進行測試評價。通過激光測距機的精確測距功能實現(xiàn)涂/未涂地面目標的定位,采集運動中帶距離信息的地面目標熱紅外圖像信息。利用目標和背景灰度均值對比度C 的計算公式[12-13]:
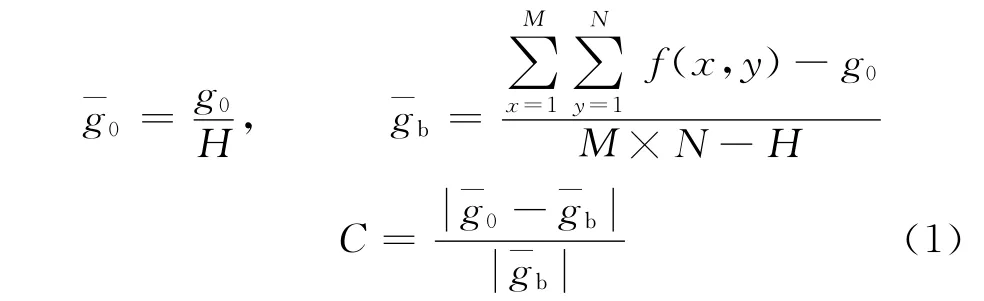
紅外隱身效率γ的計算公式:

式(2)中,γ為紅外隱身效率;W 表示所選目標與背景灰度均值對比度C總量;W′表示目標隱身后目標/背景的灰度均值對比度降低的數(shù)量。
經(jīng)過專用的圖像識別評價軟件分析處理,將含有相同距離信息的涂/未涂地面目標熱紅外圖像對比分析,確定熱圖的識別特性及提取方法,得出涂/未涂運動地面目標的識別概率,完成動態(tài)地面目標紅外隱身效能分析,最終形成動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)。
2.3 工作流程
動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)工作流程如圖4所示。
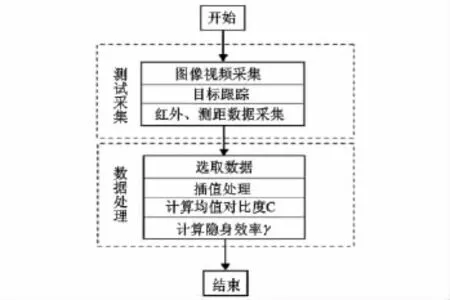
圖4 測試系統(tǒng)工作流程示意圖Fig.4 Work process of test system
該測試系統(tǒng)主要工作過程由兩部分組成:測試采集和后期的數(shù)據(jù)處理過程。測試采集過程主要分為三步:1)通過電視跟蹤系統(tǒng)采集目標與背景的視頻信號,利用圖像處理算法,給出目標在視場中的位置,進而把目標的位置信息傳送給主控系統(tǒng);2)主控系統(tǒng)根據(jù)電視跟蹤系統(tǒng)提供的目標位置信息,經(jīng)過角度合成和預(yù)測,驅(qū)動控制二維跟蹤轉(zhuǎn)臺系統(tǒng),使目標穩(wěn)定地處于視場中心,同時二維轉(zhuǎn)臺系統(tǒng)將實時的角度位置信息傳給主控系統(tǒng)以調(diào)整、控制和記錄;3)在二維轉(zhuǎn)臺系統(tǒng)鎖定目標之后,主控系統(tǒng)發(fā)出驅(qū)動控制指令,驅(qū)動激光測距系統(tǒng)和紅外探測與采集系統(tǒng)工作,并采集、記錄這兩個系統(tǒng)傳送回來的測試信息。
含有距離信息的動態(tài)目標紅外視頻熱圖序列通過專用的圖像識別評價軟件進行分析處理:
1)調(diào)用采集的動態(tài)目標紅外視頻圖像序列和距離數(shù)據(jù),并對其作初步選取;2)利用插值處理模塊對視頻數(shù)據(jù)和距離數(shù)據(jù)進行線性插值運算處理,使紅外熱圖數(shù)據(jù)的幀頻能一一對應(yīng)距離數(shù)據(jù);3)對匹配后的紅外圖像進行目標/背景區(qū)提取,分離出目標和背景,計算兩者灰度平均值,再由式(1)得出目標和背景灰度均值對比度C;4)最后,由式(2)計算目標涂裝隱身涂層后的隱身效率即目標和背景灰度均值對比度降低的概率,即紅外隱身效率,是評價目標隱身效能好壞的依據(jù),越大,隱身效果越好。
3 系統(tǒng)驗證測試與結(jié)果分析
利用動態(tài)目標熱紅外涂層隱身效能測試評價系統(tǒng)對坦克目標進行涂裝隱身涂層前后的動態(tài)某波段紅外特征測試。測試現(xiàn)場布局如圖5所示。
本次試驗所用熱像儀采集的幀頻紅外熱圖大小為320×240像素,灰度取值范圍為0~255。試驗分別在側(cè)向、正向測試點共采集了20組未涂裝和涂裝坦克的運動熱像及距離數(shù)據(jù)。圖6為在同一位置采集的側(cè)向未涂/涂裝坦克紅外熱圖。試驗中,涂裝和未涂裝的測試條件如表1所示。利用式(1)計算目標/背景熱像圖的灰度均值對比度,得到如表2所示的結(jié)果。注:目標的紅外隱身涂層效能與其所處的環(huán)境密切相關(guān)。
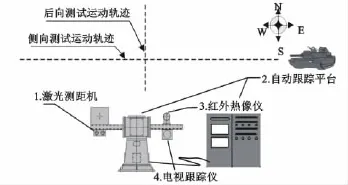
圖5 測試現(xiàn)場布局示意圖Fig.5 Test layout
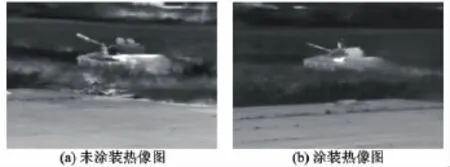
圖6 未涂/涂裝坦克某紅外波段側(cè)向熱圖Fig.6 Infrared side elevations of without coat and coat tank
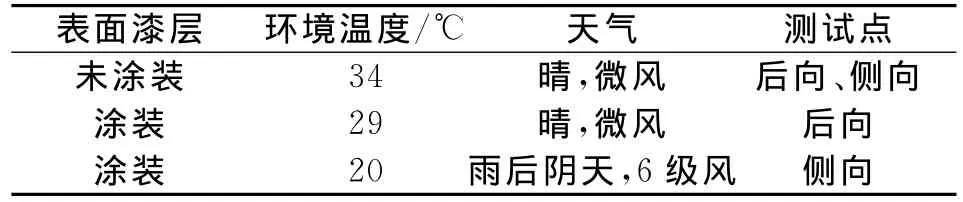
表1 試驗環(huán)境狀況表Tab.1 Test environment statue
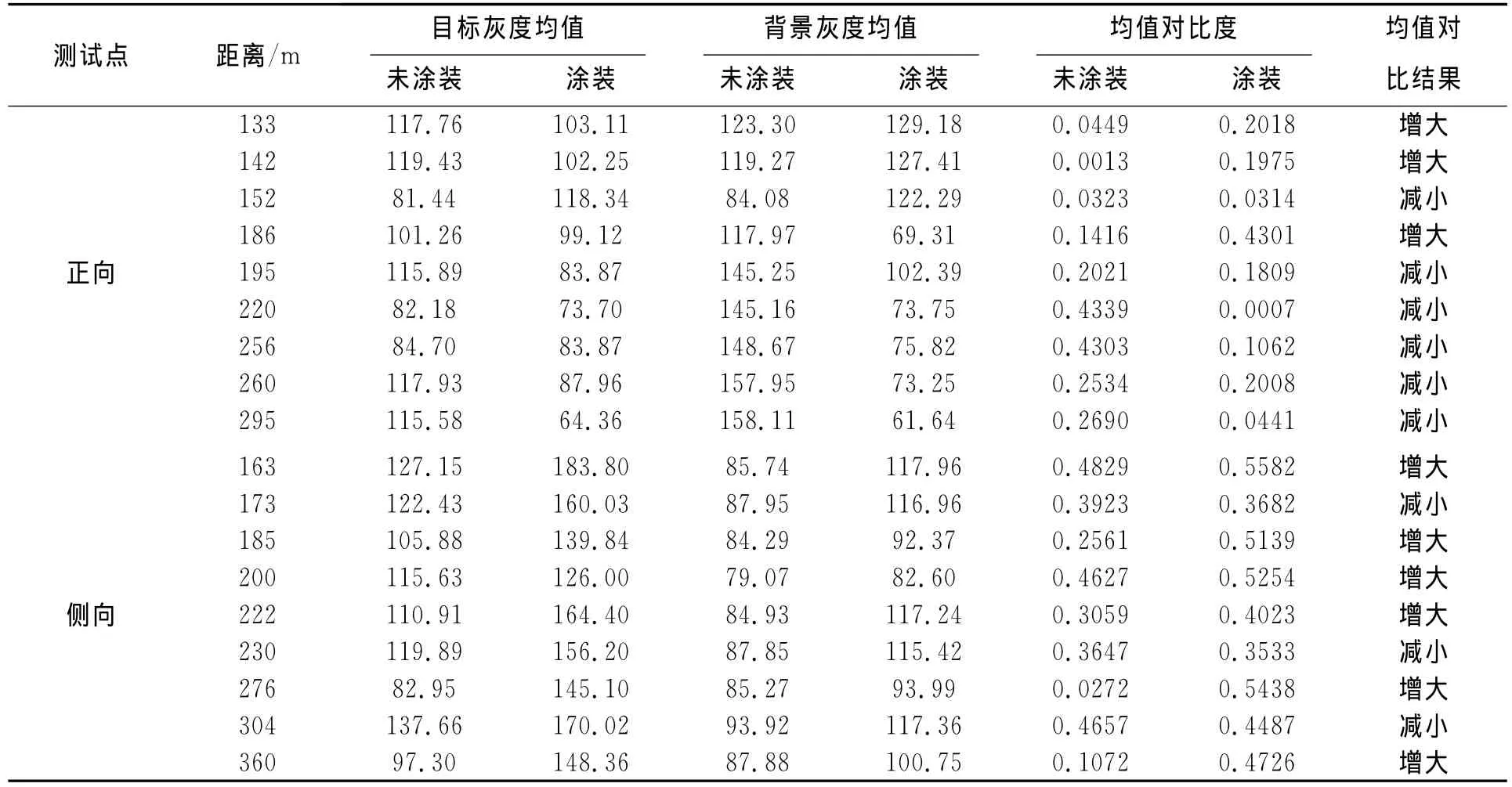
表2 動態(tài)隱身測試數(shù)據(jù)及結(jié)果表Tab.2 Dynamic stealth test data and result
從表2中可以看到,在所有的18組測試數(shù)據(jù)對比中,涂裝隱身涂層后的目標/背景的灰度均值對比度有9組出現(xiàn)了增大的情況,出現(xiàn)降低的數(shù)據(jù)組只有9組且降低比率也很小。再根據(jù)式(2)計算得出紅外隱身效率γ=0.5。證明:本次紅外隱身涂裝方案在該試驗環(huán)境中沒有達到隱身效果,該隱身方案不適合此背景環(huán)境中的紅外隱身。
由上述測試及結(jié)果分析可以看出,目標熱紅外涂層動態(tài)隱身效能測試評價系統(tǒng)滿足對真實戰(zhàn)場環(huán)境下動態(tài)地面目標的隱身涂層效能測試,且利用專用的圖像識別評價軟件進行動態(tài)隱身效能評價,避免了人眼識別產(chǎn)生的誤差。
4 結(jié)論
本文提出了一種測試坦克裝甲車等地面運動目標熱紅外隱身涂層,并分析給出隱身效果性能好壞的自動測試評價系統(tǒng)。系統(tǒng)由紅外熱像采集模塊、激光測距模塊、光電自動跟蹤測試平臺和后期對采集的熱紅外圖像隱身效能分析評價軟件構(gòu)成。通過對坦克動態(tài)隱身涂層效能測試評價證明:本系統(tǒng)適用于評價運動地面目標熱紅外涂層的隱身偽裝效果,也能對靜止目標進行測試評價。該測試系統(tǒng)解決了在真實作戰(zhàn)環(huán)境下,坦克裝甲車目標在運動狀態(tài)下的隱身效能評價,避免了通過人眼識別而產(chǎn)生較大不確定因素的缺陷。
[1]王博,王自榮,孫曉泉.一種評價熱紅外涂層隱身效果的方法[J].航天電子對抗,2004(1):63-65.WANG Bo,WANG Zirong,SUN Xiaoquan.An stealth evaluation method of thermo infrared coat[J].Aerospace Electronic Warfare,2004(1):63-65.
[2]Mark L B Rodgers.The development and application of diurnal thermal modeling for camouflage,concealment and deception[J].Proceedings of SPIE,2000,4029:369-377.
[3]秦建飛,劉永弘,呂進.熱紅外偽裝效果評價系統(tǒng)的設(shè)計與實現(xiàn)[J].工兵裝備研究,2003,22(3):17-20.QIN Jianfei,LIU Yonghong,LV Jin.Design and realization of thermo infrared disguise effect evaluation system[J].Engineer Equipment Research.2003,22(3):17-20.
[4]Vaitekunas D A,Alexan K,Law rence O E,et al.SHIPIR/NTCS:a naval ship infrared signature counterm easure and threat engagement simulator[J].SPIE,1996,2744:411-424.
[5]韓玉閣,宣益民.戰(zhàn)車紅外隱身效果評估方法研究[J].紅外技術(shù),2003,25(6):22-24.HAN Yuge,XUAN Yimin.The methodology study for the infrared camouflage effect evaluating of the armored vehicle[J].Infrared Technology,2003,25(6):22-24.
[6]朱濤,徐曉剛,王孝通,徐冠雷.隱身涂料效果評估系統(tǒng)研究[J].兵工學(xué)報,2010,31(1):124-128.ZHU Tao,XU Xiaogang,WANG Xiaotong,XU Guanlei.Research on effect evaluation system of stealth paint[J].Acta Armamentarii,2010,31(1):124-128.
[7]羅來科,韓玉閣,章桂芳,等.坦克車輛紅外特性測試與分析[J].車輛與動力技術(shù),2005(4):7-11.LUO Laike,HAN Yuge,ZHANG Guifang,et al.Study on test and evaluation on infrared features of tanks[J].Vehicle & Power Technology,2005(4):7-11.
[8]崔寶生,鄒南智.紅外偽裝效果檢測方法研究[J].紅外與激光工程,2000,29(1):62-64.CUI Baosheng,ZOU Nanzhi.Study on infrared effect simulation measurement of camouflage equipment[J].Infrared and Laser Engineering,2000,29(1):62-64.
[9]黃立新.機動式光電跟蹤轉(zhuǎn)臺小型化設(shè)計與可靠性研究[D].哈爾濱:哈爾濱工程大學(xué),2008.
[10]劉興堂,周自全,李為民,等.現(xiàn)代導(dǎo)航、制導(dǎo)與測控技術(shù)[M].北京:科學(xué)出版社,2010.
[11]何照才,胡寶安.光學(xué)測量系統(tǒng)[M].北京:國防工業(yè)出版社,2002.
[12]宣益民,韓玉閣.地面目標與背景的紅外特征[M].北京:國防工業(yè)出版社,2004.
[13]陳翾,楊立,張曉懷.目標紅外涂料隱身技術(shù)評判標準研究[J].光電工程,2008,35(10):43-47.CHEN Xuan,YANG Li,ZHANG Xiaohuai.Judgment criterion of infrared camouflage coating technology of targets[J].Opto-electronic Engineering,2008,35(10):43-47.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
