基于雙脈沖參量微擾的船舶運動混沌控制技術(shù)
2012-12-02 06:06:50李天偉楊紹清李正友
艦船科學技術(shù) 2012年8期
黃 謙,李天偉,楊紹清,李正友
(1.海軍大連艦艇學院 航海系,遼寧 大連116018;2.中國人民解放軍91257 部隊,浙江 舟山316001;3.海軍大連艦艇學院 信息與通信工程系,遼寧 大連116018)
0 引 言
海上航行的船舶是在波浪環(huán)境中運動的,同時受到風、流及其他外部因素的擾動,在航行過程中必定會因為受外力的擾動而產(chǎn)生橫搖及首搖運動,尤其是軍用艦艇的這種受迫運動,對艦載武器的作戰(zhàn)使用和特種作業(yè)必定會產(chǎn)生諸多不利影響,嚴重時甚至危及艦艇自身安全。如何避免這種情況的發(fā)生或降低船舶所受不良情況影響是船舶運動控制領(lǐng)域研究的一大重要課題。近年來,國內(nèi)外許多學者開始采用非線性動力學理論來研究船舶的各種運動,同時,隨著混沌理論在非線性研究中的出現(xiàn)和日益發(fā)展,人們開始將混沌理論引入對船舶非線性運動的研究之中,以便從機理及特性上對以上現(xiàn)象進行解釋[1-9]。大量的研究表明,船舶運動中產(chǎn)生的非線性混沌運動是導致船舶航向無法保持或傾覆的重要因素。
目前,國內(nèi)外許多學者提出了多種混沌控制方法[7-10],張顯庫[7]提出利用精確反饋線性化和閉環(huán)增益成形算法相結(jié)合的非線性簡捷控制方法進行船舶橫搖運動的混沌控制,取得了較好的效果。李芃[8]等通過考慮設(shè)計PID 控制器使得混沌系統(tǒng)較快穩(wěn)定到極限環(huán)上,成功抑制了混沌,但在考慮控制對象時沒有考慮模型中的正弦分量影響,且沒有穩(wěn)定至不動點上,具有一定片面性。王林澤[10]提出用閉環(huán)反饋方式將控制目標與實測系統(tǒng)狀態(tài)量之間的差值作用于受控系統(tǒng),達到控制分叉或混沌的目的。
本文從船舶運動非線性模型角度著手,提出采用脈沖參量微擾控制混沌系統(tǒng)的方法,在系統(tǒng)參量微擾中引入脈沖控制策略實現(xiàn)對混沌系統(tǒng)的有效控制。針對所研究的某型軍用艦船運動非線性模型,提出了改進的雙脈沖參量微擾控制方法,將混沌系統(tǒng)穩(wěn)定到新的周期軌道或不動點上,取得了較好的控制效果。
1 船舶運動非線性模型
1.1 模型建立
根據(jù)船舶線性操縱運動微分方程組:

式中:u0為航行速度;r 為轉(zhuǎn)首角速度;v 為橫漂速度;δ 為舵角;m 為船舶質(zhì)量;IZ為船舶質(zhì)量對通過重心鉛垂軸的慣性矩。力Y 和N 及相對分量是由船舶水動力和水動力矩及舵力和舵力矩產(chǎn)生的。文獻[9]通過對其進行變換,得到時域下船舶轉(zhuǎn)首運動方程并用非線性函數(shù)H(r)=nr+qr3代替其中的一階項r 得到非線性Bech 模型:

式中:a1為阻尼系數(shù);a0為剛度系數(shù);其余參數(shù)計算表達式參考文獻[9]。根據(jù)Bech 模型,在船舶直航過程中,為模擬波浪作用,將給定值r0取為正弦函數(shù)B·sinωt,并對船舶轉(zhuǎn)首角速度作比例反饋控制,即令舵角δ=kp(r0-r),令,化簡可得如下船舶運動非線性數(shù)學模型:
觀察式(3)發(fā)現(xiàn)與受迫Duffing 方程極為相似,文獻[9]指出當船的阻尼項系數(shù)和剛度項系數(shù)相差不是很大時,通過反饋增量的補償,阻尼項系數(shù)和剛度項系數(shù)是同一數(shù)量級,在較小的給定值下,系統(tǒng)將進入非線性的混沌系統(tǒng)狀態(tài)。
1.2 仿真及混沌分析
為了驗證該模型是否具有混沌動力學特性,論文以某型軍用艦船為研究對象,令kp=5,ω=0.60,B=0.4,計算其相應(yīng)參數(shù)得出該型艦的運動非線性模型如下:

采用Matlab 7.8a 的Simulink 對模型進行仿真,仿真運行得到系統(tǒng)相位圖,如圖1所示。
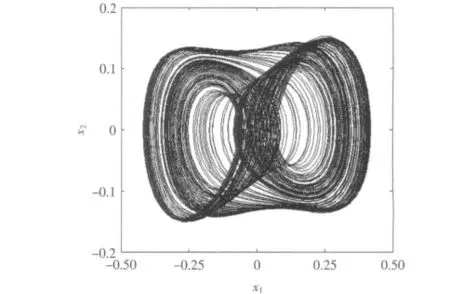
圖1 系統(tǒng)相圖Fig.1 Figure of system phase
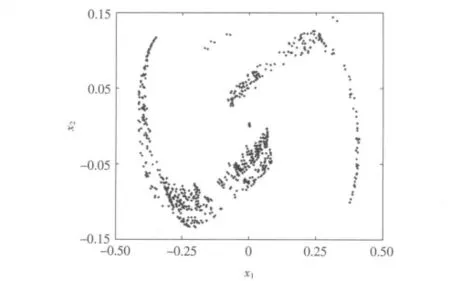
圖2 Poincare 截面映射圖Fig.2 Poincare section map
為了進一步驗證系統(tǒng)的混沌特性,采用Poincare截面法,即在相空間中適當選取一截面,稱為Poincare 截面,相空間的連續(xù)軌跡與Poincare 截面的交點稱為截點,當Poincare 截面上是一些成片的具有分形結(jié)構(gòu)的密集點時,運動便是混沌的[11]。Poincare 截面映射圖如圖2所示。綜合以上可以發(fā)現(xiàn),該模型具有較為明顯的混沌特性,進一步證明了當系統(tǒng)參量在某一范圍內(nèi)時,船舶運動非線性模型會產(chǎn)生混沌現(xiàn)象。
2 基于離散脈沖參量微擾的控制方法
2.1 控制方法
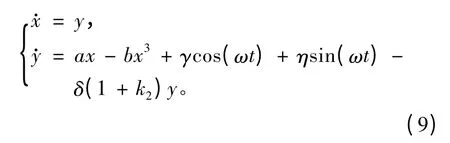
依據(jù)式(4)并參考Duffing 方程,令x1=x,x2=y,a=0.30,b=4.20,γ=0.03,η=0.08,ω=0.60,δ=0.47,則式(4)可寫為

由1.2 節(jié)可知,由于系統(tǒng)參量的變化,導致船舶產(chǎn)生混沌運動。若系統(tǒng)存在穩(wěn)定的周期軌,在某一時刻參數(shù)變化后,則在原周期點系統(tǒng)不再保持周期運動。
研究發(fā)現(xiàn),對混沌系統(tǒng)的參量實施脈沖微擾能實現(xiàn)混沌控制[10-12],且在對實際系統(tǒng)的混沌控制中較易實現(xiàn)。本文提出將離散脈沖微擾應(yīng)用于某型軍用艦船運動非線性模型,實現(xiàn)了對連續(xù)非線性系統(tǒng)的混沌控制。
基于離散脈沖參量微擾的控制方法,以系統(tǒng)參量中某一參量λ 作為微擾對象,從時間t0開始進行控制,每隔Δt 時間,對參量λ 進行擾動,則受控系統(tǒng)中該參量變?yōu)槿缦滦问?

其中:n=0,1,2,…;k 為脈沖強度;Δt 為脈沖作用時間間隔,若以系統(tǒng)參量δ 為微擾對象,則在t0+n·Δt 時間點上,受控系統(tǒng)變?yōu)槿缦滦问?
而在其余時間點上系統(tǒng)仍如式(5)所示。當k 和Δt取合適值時,可以把混沌系統(tǒng)(5)穩(wěn)定到周期軌道上,故而脈沖強度k 及作用間隔時間Δt 的選取成為了實現(xiàn)控制的關(guān)鍵環(huán)節(jié)。
2.2 仿真結(jié)果
通過研究發(fā)現(xiàn),對脈沖強度k 及作用時間間隔Δt 的不同取值,可以得到不同的控制效果。本文運用Matlab 的Simulink 進行控制仿真,采用四階Runge-Kutta 方法,仿真積分步長取為0.01 s,仿真時間400 s,在t0=48 s 時加入脈沖控制。圖3 和圖4 為k 和Δt 不同取值條件下的仿真結(jié)果,脈沖控制參數(shù)如圖3 和圖4所示。
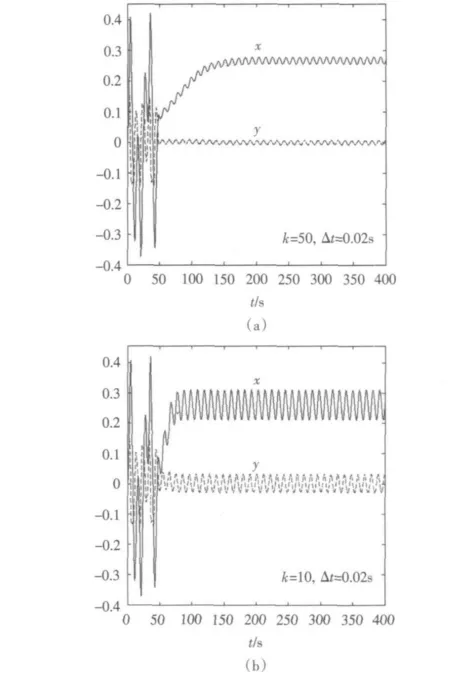
圖3 系統(tǒng)控制仿真結(jié)果(Δt=0.02 s)Fig.3 Simulation results of pulse control(Δt=0.02 s)
通過大量仿真研究發(fā)現(xiàn),采用離散脈沖對系統(tǒng)某一參量進行微擾,可以實現(xiàn)對混沌系統(tǒng)的有效控制,并得出以下結(jié)論:
1)當固定脈沖作用時間間隔Δt,改變脈沖強度k 時,隨著k 的增大,受控系統(tǒng)變量振幅隨之減小,但系統(tǒng)穩(wěn)定時間增大,當k 取值很大時,系統(tǒng)雖然也能穩(wěn)定到不動點上,但若不在不動點附近實施控制,則系統(tǒng)穩(wěn)定到不動點時間很長,實用性不夠;
2)當固定脈沖強度k,改變脈沖作用時間間隔Δt 時,隨著Δt 的增大,受控系統(tǒng)變量振幅隨之增大,但系統(tǒng)穩(wěn)定時間減小;
3)在實際中,可以固定脈沖作用時間間隔Δt,在脈沖強度k >0 的范圍內(nèi)改變?nèi)≈担涂梢詫崿F(xiàn)將系統(tǒng)穩(wěn)定在P=1 到多個周期的軌道;而當取k <0時,系統(tǒng)雖然能實現(xiàn)穩(wěn)定,但穩(wěn)定后系統(tǒng)變量振幅很大,也就失去了控制的意義;
4)采用離散脈沖對系統(tǒng)某一參量進行微擾,對于控制時刻沒有要求,但為得到所需控制結(jié)果,需要對脈沖強度k 及時間間隔Δt 進行參數(shù)試湊,控制的實施過程較為繁瑣,且很難將系統(tǒng)穩(wěn)定到不動點上。
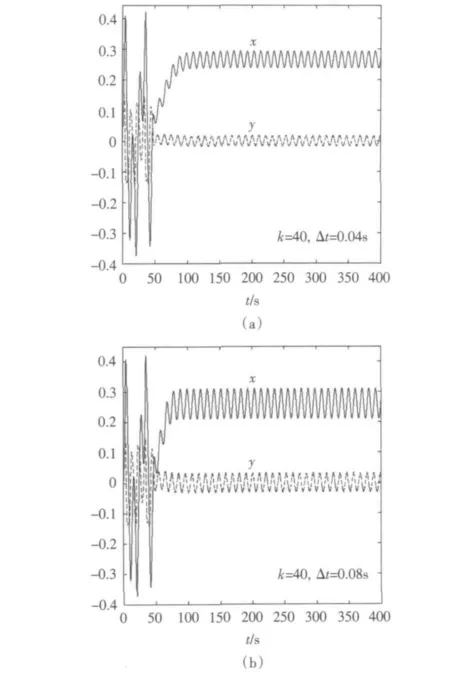
圖4 系統(tǒng)控制仿真結(jié)果(k=40)Fig.4 Simulation results of pulse control(k=40)
3 改進雙脈沖參量微擾控制方法
針對采用離散脈沖對系統(tǒng)單一參量進行微擾實現(xiàn)混沌控制方法的不足,為將混沌系統(tǒng)盡快穩(wěn)定到新的不動點上,針對所研究的某型軍用艦船運動非線性模型,本文提出改進的雙脈沖參量微擾控制方法,即利用離散脈沖對多個系統(tǒng)參量同時進行微擾,通過脈沖參數(shù)的適當選取實現(xiàn)對混沌系統(tǒng)的快速有效控制。
本文提出的改進離散脈沖參量微擾控制算法是,從時間t0開始,每隔Δt 時間對式(5)所示系統(tǒng)中的2個參量分別采用不同的離散脈沖進行微擾控制。對參量進行擾動時,受控參量如式(6)所示。以對系統(tǒng)參量a 及δ 進行微擾控制為例,則在t0+n·Δt1時間點上,受控系統(tǒng)變?yōu)槿缦滦问?
在t0+n·Δt2時間點上,受控系統(tǒng)變?yōu)槿缦滦问?
而在其余時間點上系統(tǒng)仍如式(5)所示。其中,k1和k2為不同脈沖的脈沖強度,Δt1和Δt2為不同脈沖對應(yīng)的作用時間間隔,不同脈沖的控制參數(shù)取值可以不同,也可以相同。
為驗證本文所提算法的控制效果,對受控系統(tǒng)進行仿真研究,用Matlab 的Simulink 進行仿真,采用四階Runge-Kutta 方法,仿真積分步長取為0.01 s,仿真時間400 s,在t0=48 s 時加入脈沖控制。圖5 和圖6為k1,Δt1與k2,Δt2不同取值條件下的仿真結(jié)果,脈沖控制參數(shù)如圖5 和圖6所示。
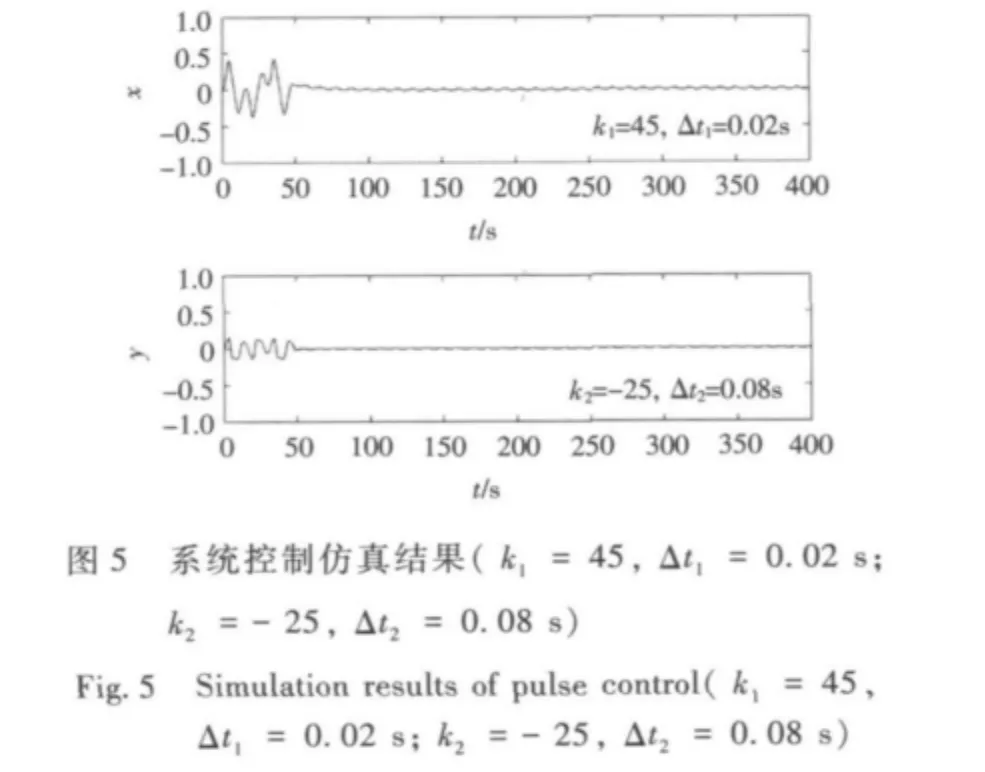
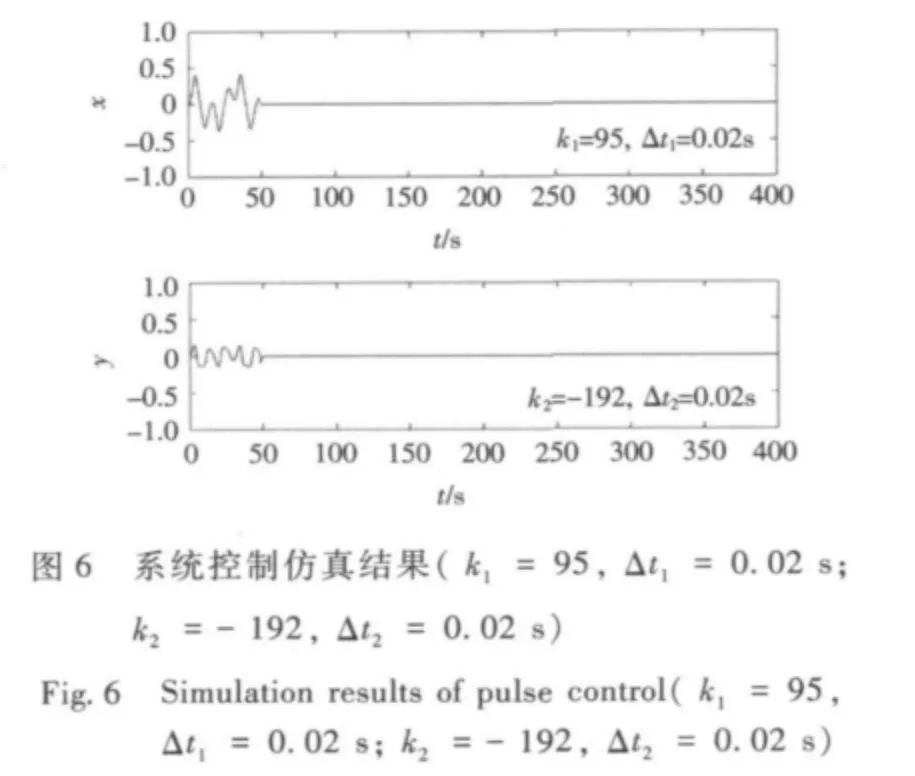
通過控制仿真研究發(fā)現(xiàn),采用本文提出的改進雙脈沖參量微擾控制方法進行混沌控制時,能將系統(tǒng)穩(wěn)定在振幅較小的周期軌道或不動點上,與采用離散脈沖對單一參量進行微擾相比,其控制效果得到了明顯的提高,并探索出如下規(guī)律:
1)當固定脈沖作用時間間隔為Δt,改變脈沖強度k 時,隨著的增大,受控系統(tǒng)變量振幅隨之減小,同時,系統(tǒng)穩(wěn)定時間也隨之減小;
2)當固定脈沖強度為k,改變脈沖作用時間間隔Δt 時,隨著Δt 的增大,受控系統(tǒng)變量振幅隨之增大,同時,系統(tǒng)穩(wěn)定時間也隨之增大;
3)在某型軍用艦船運動非線性模型的混沌控制中,可以選擇固定脈沖作用時間間隔Δt,在脈沖強度k1>0,k2<0 的范圍內(nèi)改變?nèi)≈担涂梢詫崿F(xiàn)將系統(tǒng)穩(wěn)定在不動點或周期軌道上;
4)采用改進的雙脈沖參量微擾方法,同樣對于控制時刻沒有要求,但為得到所需控制結(jié)果,依然需要對脈沖強度k 及時間間隔Δt 進行參數(shù)試湊,雖然由于控制脈沖數(shù)的增加,使得控制的調(diào)整實施過程略為復(fù)雜,但對混沌系統(tǒng)的控制效果確實得到了很大的改進和提高。
4 結(jié) 語
本文在船舶運動混沌系統(tǒng)的參量控制中引入脈沖參量微擾控制策略,對船舶運動的混沌狀態(tài)進行控制,并以某型軍用艦船為例,對船舶運動非線性模型的離散脈沖參量微擾控制方法進行了研究,提出了改進的雙脈沖參量微擾控制方法。仿真的結(jié)果表明,本文的控制方法能對連續(xù)非線性混沌系統(tǒng)實施有效控制,且通過對脈沖參數(shù)的調(diào)整可以實現(xiàn)將系統(tǒng)穩(wěn)定在新的不動點或周期軌道上,同時也可以對控制代價和控制速度進行選擇。以本文研究結(jié)果為依據(jù)設(shè)計的脈沖控制器結(jié)構(gòu)簡單,操作簡便,具有潛在工程應(yīng)用價值。
[1]劉利琴,唐友剛,吳志強.橫浪中船舶的隨機混沌運動[J].工程力學,2008,25(6):204-208.
LIU Li-qin,TANG You-gang,WU Zhi-qiang.Stochastic chaotic motion of ships in beam seas[J].Engineering Mechanics,2008,25(6):204-208.
[2]丁勇,胡開業(yè),邱敏芝.船舶非線性橫搖運動分析的Lyapunov 特性指數(shù)法[J].中國造船,2008,49(3):1-6.
DING Yong,HU Kai-ye,QIU Min-zhi.The method of Lyapunov characteristic exponents for analyzing the stability of ship′s nonlinear roll motion[J].Shipbuilding of China,2008,49(3):1-6.
[3]FALZARANO M,SHAW S W,TROESH A W.Application of global methods for analyzing dynamic system to ships rolling motion and capsizing[J].Int.J.of Bifur and Chaos,1992,2(1):101-115.
[4]HU Kai-ye,DING Yong,WANG Hong-wei.Chaotic roll motions of ships in regular longitudinal waves[J].Journal of Marine Science and Application,2010,9(2):208-212.
[5]McCUE L S.Chaotic vessel motion and capsize in beam seas[D].Michigan:Department of Naval Architecture and Marine Engineering University Michigan,2004.
[6]WANG Ying-guang,HUANG Zhi-long,TAN Jia-hua.First passage probability of nonlinear ship rolling in radom seas[J].Journal of Ship Mechanics,2008,12(6):870-879.
[7]張顯庫,王坤飛.船舶橫搖運動中的混沌及其非線性簡捷控制[J].中國造船,2010,51(4):21-27.ZHANG Xian-ku,WANG Kun-fei.Chaos of ships rolling motion and its nonlinear simple and direct control[J].Shipbuilding of China,2010,51(4):21-27.
[8]李芃,張曉宇,何晉,李文秀.船舶運動控制中的非線性混沌及PID 控制方法[J].艦船科學技術(shù),2002,24(5):36-39.
LI Peng,ZHANG Xiao-yu,HE Jin,LI Wen-xiu.The nonlinear chaos in ship movements control and pid controlling chaos[J].Ship Science and Technology,2002,24(5):36-39.
[9]蘇寧.混沌學與船舶運動控制[D].大連:大連海事大學,1996.SU Ning.Chaos and ship steering control[D].Dalian:Dalian Maritime University,1996.
[10]王林澤,趙文禮.用閉環(huán)反饋周期脈沖抑制分叉和混沌運動[J].控制理論與應(yīng)用,2006,23(3):487-490.
WANG Lin-ze,ZHAO Wen-li.Feedback-based method using periodic pulse to suppress bifurcations and chaotic motions[J].Control Theory & Applications,2006,23(3):487-490.
[11]呂金虎,陸君安,陳士華.混沌時間序列分析及其應(yīng)用[M].武漢:武漢大學出版社,2002.46-56.
LV Jin-hu,LU Jun-an,CHEN Shi-hua.Analysis of chaos time series and its application[M].Wuhan:Publishing Press of Wuhan University,2002.46-56.
[12]羅曉曙,方錦清,王力虎.一種基于間歇性正比于系統(tǒng)參量的脈沖微擾控制混沌方法[J].物理學報,1999,48(12):2196-2201.
LUO Xiao-shu,F(xiàn)ANG Jin-qing,WANG Li-hu.A method of controlling chaos based on intermitant proportional pulse perturbation to the system parameters[J].Acta Physica Sinica,1999,48(12):2196-2201.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45