單軸旋轉式慣導系統誤差抑制機理分析
2012-12-02 06:06:56高賢志
艦船科學技術 2012年8期
高賢志,王 丹
(1.海軍駐天津707 所軍事代表室,天津300134;2.中國艦船研究院,北京100192)
1 旋轉調制誤差抑制的本質
旋轉調制捷聯慣性導航系統就是在捷聯慣導系統[1-3]的外面加上轉動機構和測角裝置,導航解算仍采用捷聯慣導算法,直接解算出來的是IMU(慣性測量單元)的姿態,根據IMU 相對于載體的轉動角度(由測角裝置實時獲得)得到載體的姿態信息。基于旋轉調制[4]的捷聯慣導系統的結構框圖如圖1所示。
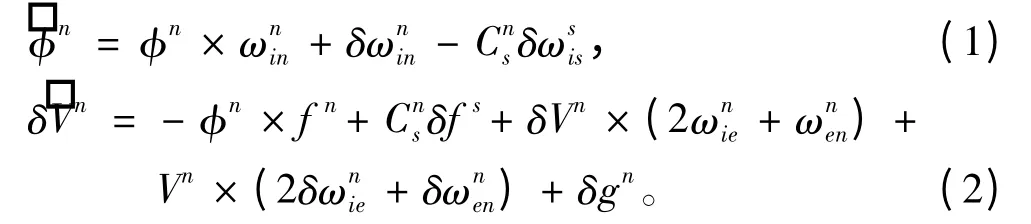
由于慣性傳感器通過旋轉機構固聯于載體,在分析基于旋轉調制的航海用光纖陀螺慣導系統原理時定義IMU 坐標系為s 系。建立基于s 坐標系的航海用光纖陀螺慣導系統的誤差方程,分析旋轉調制的原理。
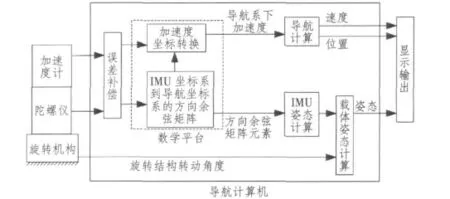
圖1 旋轉調制的捷聯慣導系統的結構框圖Fig.1 Block diagram of the rotating modulation for SINS
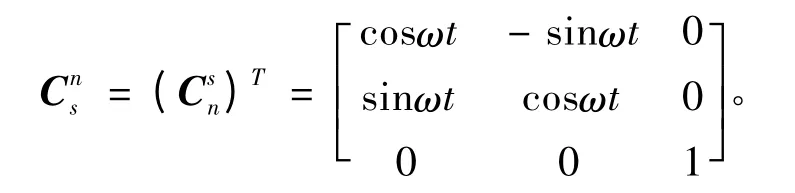
假設初始時刻IMU 坐標系、載體坐標系和導航坐標系重合;同時在整個過程中設定載體靜止,控制IMU 繞豎直方向以恒定的速度ω 開始連續轉動,則t時刻IMU 坐標系與導航坐標系之間的轉換矩陣為
2 常值誤差抑制機理分析
本節將從局部角度出發逐個討論單軸旋轉對加速度計的常值誤差、標度因數誤差的抑制效果,以及單軸旋轉對陀螺的常值誤差、標度因數誤差的抑制效果。目前現有的參考資料中的分析方法均是對誤差源在1 個旋轉周期內積分后的誤差進行討論,而本文重點討論IMU 相差180°的2 個相對位置誤差的累積效果,當IMU 旋轉1 周后,則是無數對相對位置的加權,進而便可分析出旋轉對各個誤差的抑制情況。
2.1 慣性敏感元件常值誤差
慣性敏感元件常值誤差包括陀螺的常值漂移ε以及加速度計零偏?,它們也是慣性敏感元件的主要誤差源。
下面以IMU 先后停留在2 個相反位置上為例,具體分析旋轉對慣性敏感元件常值誤差的抑制情況。
例如,初始時IMU 轉臺相對載體z 軸有一初始角β,將此位置設為位置1,即
停留一段時間,再令IMU 旋轉180°后停止,此時位置設為位置2,停留與位置1 相同的時間,則位置1 與位置2 的轉換矩陣可表示為

那么,
已知陀螺漂移及加速度計零偏在IMU 上引起的誤差項分別為εs和?s,那么位置1、位置2 兩時刻等效到導航坐標系上的慣性敏感元件的誤差為:
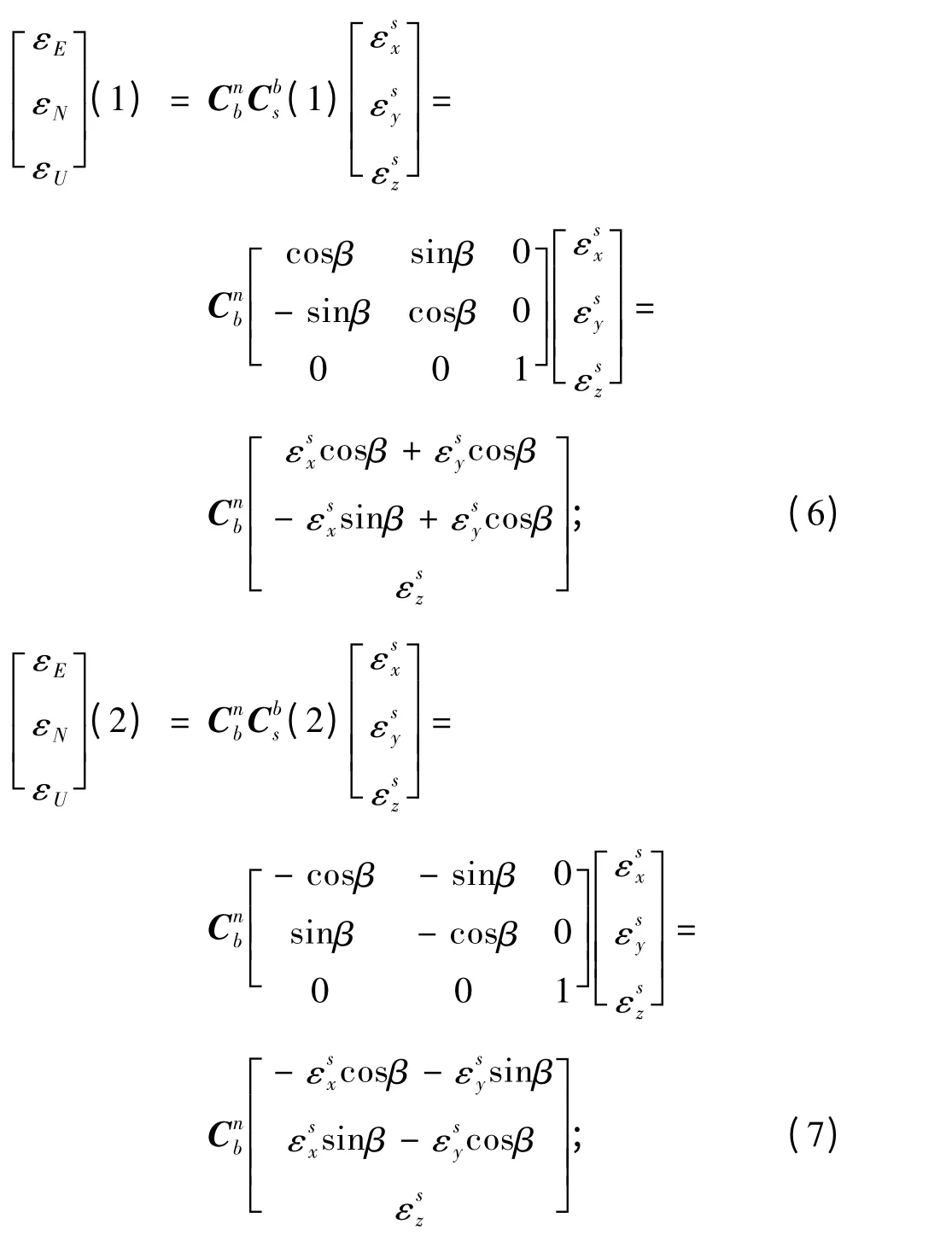
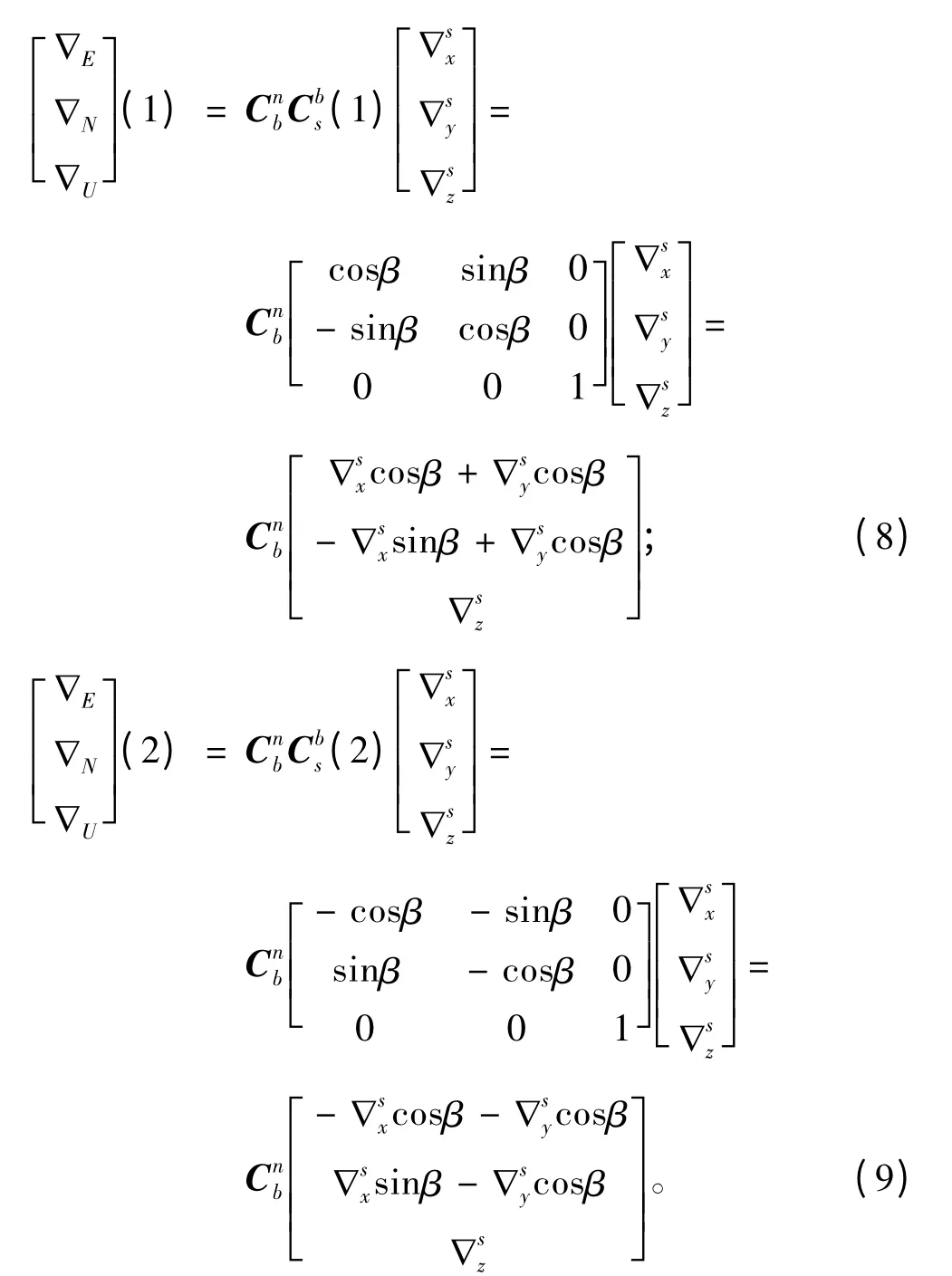
將兩位置處的陀螺漂移和加速度計零偏誤差項分別相加得:
由此可見,當導航坐標系(n 系)與載體坐標系(b 系)重合時,如果把相應兩位置的陀螺漂移和加速度零偏相加,東向和北向的陀螺漂移和加速度零偏就被抵消掉了,因而這2 個方向的誤差被調制了;而z 軸方向的誤差沒有被調制,其引起的系統誤差則隨時間積累。
以IMU 停留在相反兩方向的情況為參考,推廣到IMU 旋轉過程中,只要在對應的相反位置上旋轉的速率相同,那么在小單位時間內,我們也可以認為是在相反的位置上停留了相等的時間,即東向和北向的陀螺漂移和加速度計零偏在1 個完整的旋轉周期內的積分為0,從而抵消掉兩軸上的器件的主要誤差。
2.2 慣性敏感元件標度因數誤差
標度因數是光纖陀螺儀的重要性能指標,是陀螺儀輸出量與輸入角速率的比值(輸出/輸入=G,類似傳遞函數),用某一特定直線的斜率表示。該直線是根據整個輸入角速率范圍內測得的輸入輸出數據,通過最小二乘法擬合求得。陀螺儀的標度因數不可能標定的絕對準確(誤差),而且標度因數還可能隨著時間、環境等因素而改變,所以實際系統中慣性元件總是存在標度因數誤差。
下面研究旋轉對慣性敏感元件標度因數常值偏差的抑制情況,仍然分為2 種旋轉形式來研究。
1)假設初始時刻IMU 坐標系和導航坐標系重合,從0 時刻開始,控制旋轉機構讓IMU 繞天向軸以角速度ω 勻速轉動,除了旋轉運動之外沒有其他的運動,3 個陀螺儀的敏感軸只感受到地球自轉角速度的分量,如果不存在誤差,那么t 時刻3 個陀螺敏感軸的理論輸出應該是:
式中:L 為當地的地理緯度;Ω 為地球自轉角度率,Ω=15.041 1°/h。
然而,陀螺的實際輸出是存在誤差的,其中由于標度因數誤差引起的陀螺包含誤差的輸出為:
其中,δkgx,δkgy,δkgz為3 個陀螺的標度因數誤差。

由于IMU 繞天向軸旋轉,所以IMU 坐標系到載體坐標系的轉換矩陣為
2)假設從0 時刻開始,控制旋轉機構讓IMU 繞天向軸以角速度-ω 勻速轉動,如果不存在誤差,那么在相同的t 時刻3 個陀螺敏感軸的理論輸出應該是:
同理,由上述分析可知:
又因為:
從式(21)可以看出,當導航坐標系(n 系)與載體坐標系(b 系)重合時,IMU 在繞天向軸正反旋轉相同時間內,東向陀螺儀的標度因數被抵消;北向陀螺儀的標度因數誤差等效的漂移誤差引起的姿態誤差角是周期變化的;天向軸方向上的標度因數誤差沒有被抵消掉,其引起的系統誤差則隨時間積累,但由于標度因數誤差沒有直接與旋轉角速度相乘,因此天向軸所積累的誤差大小也是有限的。而如果單獨采取形式1)或形式2)的單向旋轉,天向軸方向上的標度因數誤差直接與旋轉角速度相乘,而且與旋轉時間成正比,進行積分時會引起很大的角度誤差。因此,不管是單軸轉動還是多軸轉動,都要避免向一個方向連續轉動,以防止轉動角速度和標度因數誤差耦合引起的更大的導航誤差[8-9]。
3 仿真分析
本文采用工程上最常采用的四位置轉停方案進行仿真,限于篇幅,本文只對陀螺標度誤差的抑制效果進行仿真。初始條件設定,假設載體靜止,載體坐標系與東北天坐標系重合,地理位置為東經126.67°,北緯45.78°,3 個陀螺儀常值漂移0.01°/h,3 個陀螺儀標度因數誤差Kgx=Kgy=Kgz=30 ppm。
圖2 和圖3 為不采用任何旋轉方案的情況,即IMU 靜止的仿真曲線,圖4 和圖5 為采用持續正反轉方案的情況,其中旋轉角速度設為20°/s 的仿真曲線。
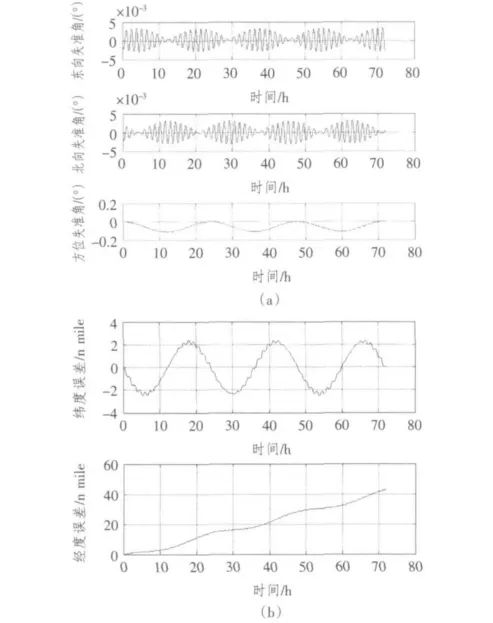
圖2 靜止狀態下陀螺常值漂移引起的導航誤差Fig.2 Gyro constant drift of navigation error caused on the stationary state
從仿真曲線2 中可以看出,陀螺儀漂移帶來的導航誤差是很大的,經度誤差隨時間增長趨勢明顯,方位失準角也在-0.1°附近振蕩;由于地球自轉角速度的存在,地球自轉角速度與標度因數誤差相乘,等效出1 個天向的陀螺常值漂移,因此標度因數誤差明顯表現在經度誤差隨時間的增長。
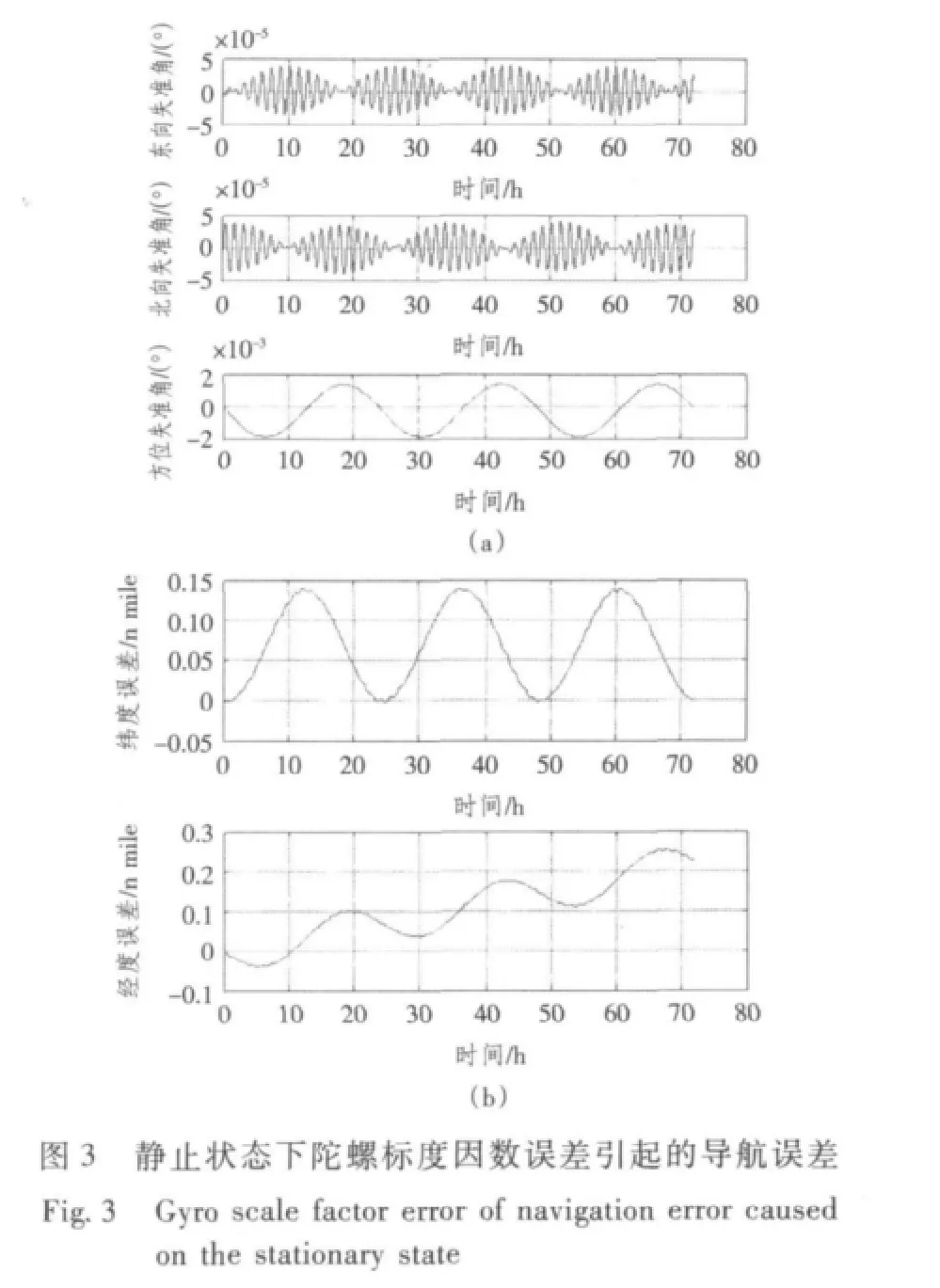
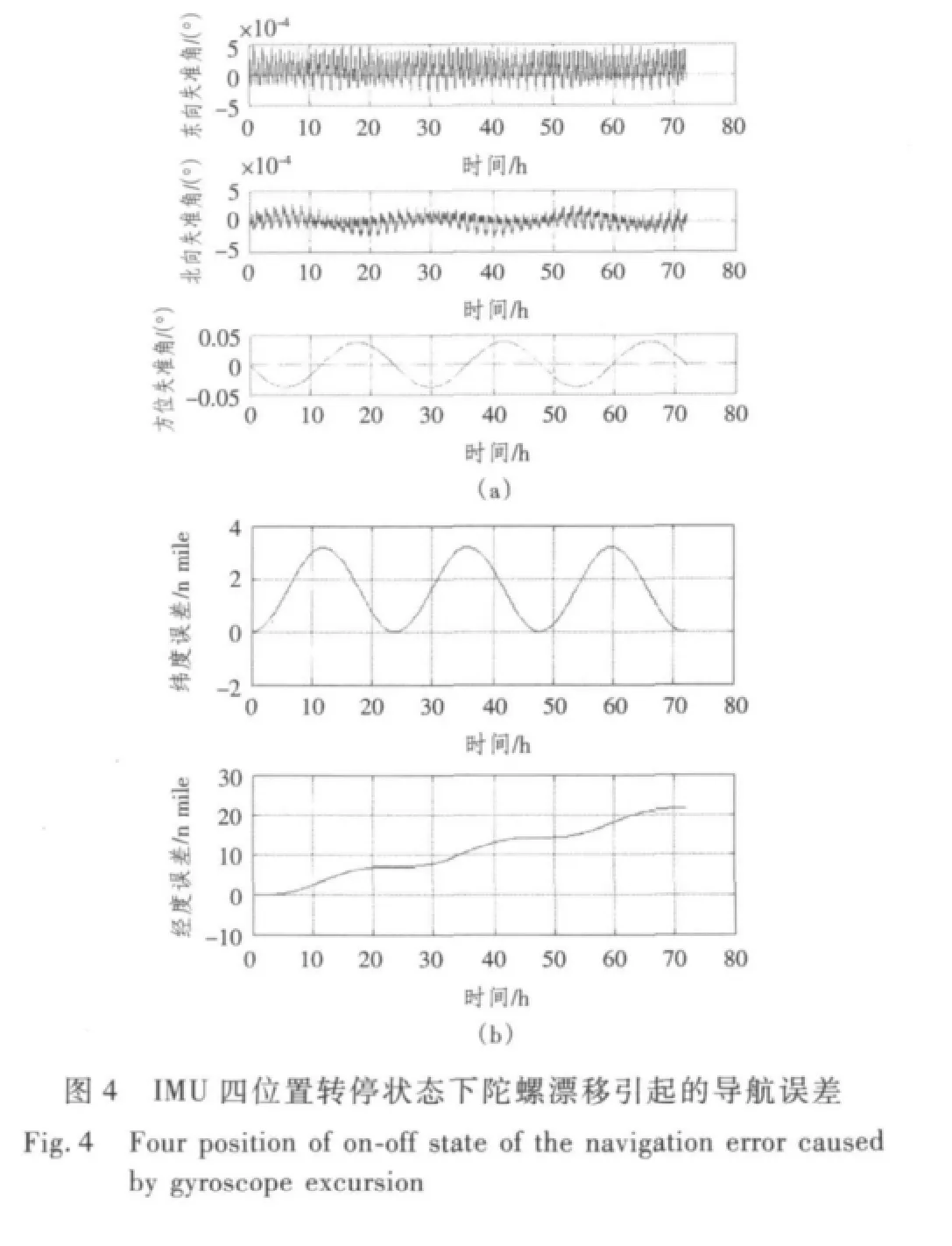
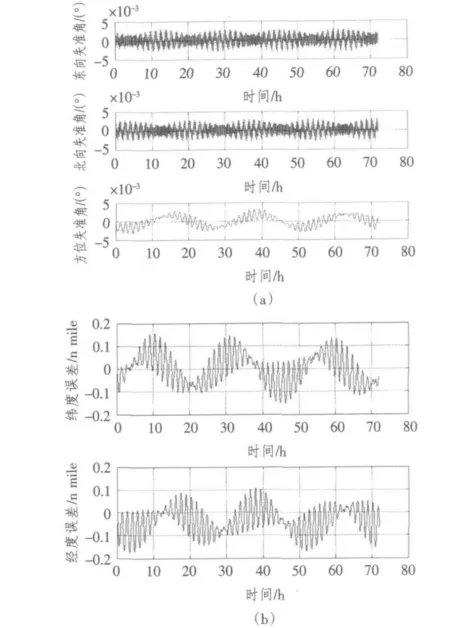
圖5 IMU 四位置轉停狀態下陀螺標度因數誤差引起的導航誤差Fig.5 Four position of on-off state of the navigation error caused by gyro scale factor
與圖2 相比較,從圖3 中可以看出,在IMU 四位置轉停狀態下陀螺漂移引起的導航誤差就小了很多,水平失準角以及方位失準角的振蕩幅值減小了一半,而且方位誤差也由原來的42 n mile/36 h 減小到12 n mile/36 h;比較圖3 和圖5 可以發現,失準角的振蕩幅值增大,緯度誤差的振蕩幅值也增大了,而方位誤差由原來的1.2 n mile/36 h 減小到0.8 n mile/36 h,這就證明了水平方向上的標度因數誤差能引起等效北向的陀螺漂移。因此,與IMU 靜止時相比,采用四位置轉停方案以后,水平失準角的振蕩幅值增加了1 個數量級。通過上面的分析可以得出,陀螺常值漂移能很好地被IMU 四位置轉停運動抵消掉,對導航精度的影響變小;標度因數誤差在旋轉運動中被激化,失準角產生更大的導航誤差,但方位精度得到了提高。
4 結 語
本文系統分析了旋轉調制對系統誤差抑制的本質,給出了單軸旋轉對慣性器件常值誤差、標度因數誤差抑制情況,最后仿真分析了四位置轉停方案對旋轉式慣導系統誤差抑制的效果。仿真結果中單軸旋轉調制使得由陀螺漂移引起的水平失準角和方位失準角振蕩幅值減小了一半,表明IMU 單軸旋轉能很好地調制陀螺常值漂移,同時也改善了慣導系統的方位精度,驗證了理論分析的正確性。
[1]陳哲.捷聯慣導系統原理[M].北京:宇航出版社,1986.1-8.
[2]秦永元.慣性導航[M].北京:科學出版社,2006.36-38.
[3]黃德鳴,程祿.慣性導航系統[M].北京:國防工業出版社,1986.66-90.
[4]于旭東,王宇,等.單軸旋轉對慣導系統誤差特性的影響[J].中國慣性技術學報,2008,16(6):643-648.
YU Xu-dong,WANG Yu,et al.Influence of single-axial rotation on INS error characteristics[J].Journal of Chinese Inertial Technology,2008,16(6):643-648.
[5]YANG Yong,MIAO Ling-juan.Fiber-optic strapdown inertial system with sensing cluster continuous rotation[J].IEEE Transactions on Aerospace and Electronic Systems.2004,40(4):1173-1178.
[6]李莉,任長明.旋轉方位慣性導航系統的研究[J].天津工程師范學院學報,2005,(2):39-41.
LI Li,REN Chang-ming.Inertrial navigation system of azimuthal rotation[J].Journal of Tianjin University of Teehnology and Education,2005,(2):39-41.
[7]李仔冰.雙軸旋轉式光纖捷聯慣導系統的誤差特性研究[D].哈爾濱:哈爾濱工程大學,2011.
[8]RICE H,MENDELSOHN L,et al.Next generation marine precision navigation system[J].IEEE Position Location and Navigation Symposium.New York,2000.200-206.
[9]黃一河,等.周期性阻尼信號對外全阻尼慣導系統位置誤差影響研究(海流修正)[J].中國慣性技術學報,1999,6(7):6-10.
HUANG Yi-he,et al.Research on the positioning error of the externalabsolutedamped ins under the influence of the periodic damping signal (tidal stream correction)[J].Journal of Chinese Inertial Technology,1999,6(7):6-10.