基于紅外傳感器的智能教室照明控制
2012-12-21 06:03:24敖弟維王亞偉楊艷芳楊俊彥
裝備制造技術 2012年5期
敖弟維,王亞偉,楊艷芳,楊俊彥
(1.武漢理工大學 物流工程學院,湖北 武漢430063;2.海洋石油工程股份有限公司,天津 300452)
隨著教育事業的發展,學校照明電耗越來越大。高校教室普遍存在一種狀況,當不多的學生在教室自習時,所有的燈都開著,造成大量的電能浪費。而學校照明用電的管理,基本處于一種粗放式的管理狀態。照明電能損失越來越大,為此很有必要開發教室照明自動控制系統。
目前,國內外照明自動控制裝置,基本上采用被動的人體感應探測、可見光探測、熱釋電紅外探測、聲音探測等方法,但都存在一定的不足。這些方法在探測上都存在一定的缺陷,其中熱釋電紅外探測應用最廣泛,但是都不能識別靜止人體。本文針對該缺點提出了可行的解決方案,并結合單片機技術,設計了一套基于紅外傳感器的智能教室照明控制系統方案。
1 方案設計
傳統的外傳感器大多用于動態人體的識別,本文所設計的紅外傳感器智能系統,不僅可以判別動態中的人體,也可對自習室中相對靜止的人體加以識別,從而達到對教室燈光照明系統進行智能控制的目的。
1.1 系統框架設計
由于人體會發出特定波長(10 μm 左右)的紅外線,因此可采用目前應用廣泛的紅外熱釋電傳感器,來識別人體信號[1],經后續電路放大和A/D轉換等處理后,傳遞給基于單片機的控制電路,以此來控制燈的開關。做到人在燈亮,人走燈滅。系統框架如圖1所示。

圖1 智能教室照明控制系統框架
1.2 傳感器設計
(1)傳感器工作原理。熱釋電紅外傳感器,是基于熱電效應的紅外傳感器,其內部的熱電元由高熱電系數的鐵鈦酸鉛汞陶瓷以及鉭酸鋰、硫酸三甘鐵等配合濾光鏡片窗口組成,其極化隨溫度的變化而改變。
為了抑制因自身溫度變化而產生的干擾,該傳感器在工藝上將兩個特征一致的熱電元反向串聯或接成差動平衡電路,從而以非接觸的方式,檢測出物體放出的紅外線能量變化,并將其轉換為電信號輸出。通過兩個晶硅片的反向串聯,傳感器中兩個極性相反、大小相等的干擾信號在內部相互抵消,得到能量補償。對于輻射至傳感器的人體紅外線,熱釋電傳感器通過安裝在前方的菲涅爾透鏡,將其聚焦后加至兩個探測元上,使傳感器產生并輸出電壓信號。菲涅爾透鏡的應用增強了元件識別的正對性和敏感度。傳感器工作原理如圖2。

圖2 熱釋電紅外傳感器的工作原理
(2)傳感器的動態檢測解決方案。熱釋電紅外傳感器只對運動的人體敏感,而在教室內很多情況下,人們都處于相對靜止或者幅度很小的運動狀態,傳感器通常不能加以有效的識別。這也正是目前市場上該類產品的缺陷所在。
本文所提出的解決方案,是要從另一個角度去解決動態檢測的問題,即讓傳感器產生一定幅度的運動,通過人和傳感器之間的相對運動,實現信號的有效識別。本文提出了傳感器的運動的兩種方式。
1.3 傳感器運動的方式
(1)振動方式。如圖3所示,把傳感器和一個小型振動器固定在一起。當人進入識別區后,傳感器檢測到人體信號,經處理后傳給控制電路,使振動器帶動傳感器一起振動,從而識別出靜止的人體。本系統每次振動時間設定為2 s,振動周期為30 s,每30 s掃描一次。如果連續兩個周期該區域內沒有人體信號,控制系統執行關閉照明燈的動作。

圖3 振動方案
(2)擺動方式。圖4所示的擺動方式,其基本思路與振動方式相同。區別在于傳感器運動的方式,是在彈片的帶動下發生擺動,從而達到相對運動的目的。通過一個小型電機驅動凸輪,即可實現彈片的擺動。

圖4 擺動方案
1.4 控制電路設計
本設計選用LM358 集成放大器來對信號進行放大處理,而后傳到控制電路,以80C51 單片機實現編程控制[2]。單片機驅動兩個繼電器,分別實現燈和電機的控制。
其過程為:傳感器識別到的人體信號經處理后,傳給單片機,單片機輸出兩個指令,一個讓控制燈的繼電器閉合,照明燈打開;另一個控制小型電機的轉動。該指令為周期性輸出,直至傳感器檢查不到人體信號時,單片機控制兩個繼電器同時斷開,照明燈熄滅,以此達到智能控制的效果。
信號處理和控制過程如圖5。

圖5 信號處理和控制過程
單片機的程序設計流程如圖6。

圖6 單片機的程序設計流程
2 教室區域規劃
圖7為一個吸頂式安裝的傳感器系統。傳感器的敏感范圍有限,若教室面積較大,可將其劃分為若干個分區,加以單獨控制[3],而不必同時開啟教室里的全部照明燈具,從而達到省電節能的效果。
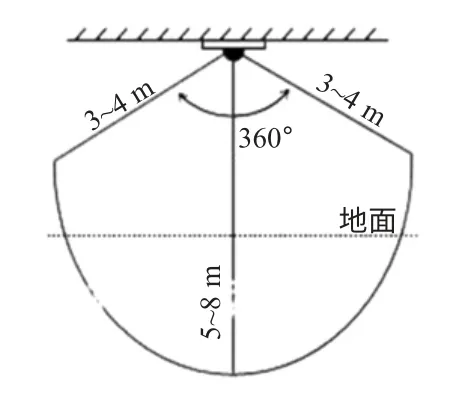
圖7 吸頂式安裝的傳感器系統
3 結束語
本文應用熱釋電傳感器及單片機控制技術,設計出教室照明控制系統,達到了省電節能、操作方便、人性化控制的效果。本設計不僅可用于教室的照明系統,還可對風扇、空調等用電裝置實施相同的控制。本系統還可推廣至車站候車室、醫院等公共場所。在當今大力倡導節能的背景下,具有很好的應用價值。
[1]董小瓊.紅外傳感器的應用研究[J].科技文匯,2006,(2):161-162.
[2]王海倫,葉冬芬.基于單片機控制的教室照明智能控制系統[J].機電一體化,2005,(1):69-70.
[3]陳歲生,盧建剛.基于智能檢測技術的室內照明系統[J].機電工程技術,2008,(5):53-56.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
數學物理學報(2017年6期)2018-01-22 02:26:40
