適應(yīng)錨機(jī)工況要求的開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)的研究
2012-12-23 04:50:58李元棟
武漢船舶職業(yè)技術(shù)學(xué)院學(xué)報 2012年2期
關(guān)鍵詞:系統(tǒng)
張 芊 胡 猛 李元棟
(鎮(zhèn)江船艇學(xué)院,江蘇鎮(zhèn)江 212003)
錨機(jī)是船舶重要的甲板機(jī)械之一,它主要承擔(dān)船舶起航、錨泊、停靠碼頭等不同航行階段中,起、拋錨和系纜的重任。目前船用錨機(jī)主要有兩種拖動控制方式,即液壓拖動和電力拖動,其中電力拖動的動力源多來自于由接觸-繼電器控制裝置與三相交流異步電動機(jī)組成的電力拖動調(diào)速系統(tǒng),由于其技術(shù)成熟、性能可靠、轉(zhuǎn)速可調(diào)等特點,已在眾多船型中得到了廣泛應(yīng)用。但是,在長期使用過程中,該系統(tǒng)體積重量較大、電機(jī)結(jié)構(gòu)復(fù)雜、調(diào)速性能有限,以及自動化、信息化程度低等缺點也逐漸顯現(xiàn)出來。本文針對錨機(jī)工況要求,結(jié)合近年來發(fā)展迅速的開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)(簡稱SRD 系統(tǒng)),就其在船用電動錨機(jī)控制系統(tǒng)中的應(yīng)用進(jìn)行探討。
1 開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)的基本組成
開關(guān)磁阻電機(jī)(簡稱SR 電機(jī))是上世紀(jì)80年代后發(fā)展起來的一種新型電機(jī),它由裝有勵磁繞組的定子和無繞組的轉(zhuǎn)子構(gòu)成,一般為雙凸極結(jié)構(gòu),其定、轉(zhuǎn)子均由普通硅鋼片疊壓而成,并沖有一定形狀的齒槽。轉(zhuǎn)子上既無繞組也無永磁體,只在定子齒極上繞有集中繞組[1~2]。開關(guān)磁阻電機(jī)用作錨機(jī)電動機(jī)具有如下優(yōu)點:
(1)電機(jī)結(jié)構(gòu)簡單,性能可靠,冗余度高,適用于環(huán)境惡劣和大功率的場合;
(2)電機(jī)可控參數(shù)多,調(diào)速性能好,可以方便地實現(xiàn)無極調(diào)速;
(3)能夠?qū)崿F(xiàn)低起動電流、高起動轉(zhuǎn)矩,且過載倍數(shù)高;
(4)轉(zhuǎn)子轉(zhuǎn)動慣量小,有較高的轉(zhuǎn)矩慣量比;
(5)轉(zhuǎn)矩方向與電流方向無關(guān),降低了對電源與功率變換電路的要求。
由SR 電機(jī)、功率變換器、控制器和檢測器所組成的開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)(簡稱SRD)是一種全數(shù)字機(jī)電一體化交流調(diào)速系統(tǒng)[3~4],其原理如圖1所示。
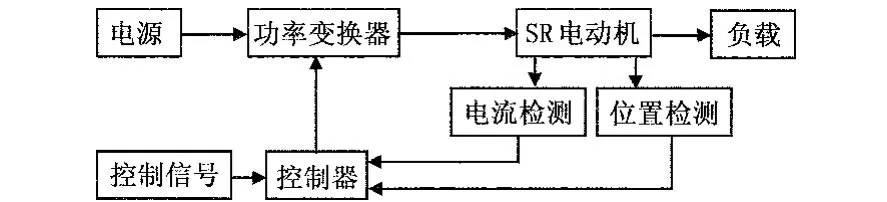
圖1 SRD 系統(tǒng)組成原理框圖
2 適應(yīng)錨機(jī)工作條件的SRD 系統(tǒng)的硬件要求
在SRD 系統(tǒng)中,SR 電機(jī)是實現(xiàn)機(jī)電能量轉(zhuǎn)換的關(guān)鍵部件,它的大小應(yīng)根據(jù)錨機(jī)實際功率要求進(jìn)行選擇,同時應(yīng)盡量選擇相數(shù)和定、轉(zhuǎn)子齒極數(shù)少的電機(jī),如四相8/6極甚至三相6/4極電機(jī)。這樣可以在不影響系統(tǒng)運行質(zhì)量的前提下,節(jié)約設(shè)備成本,同時降低系統(tǒng)的開發(fā)難度,縮短開發(fā)周期。雖然齒極數(shù)少的電機(jī)低速時的轉(zhuǎn)矩脈動現(xiàn)象較為明顯,但并不會影響錨機(jī)這一類設(shè)備的正常作業(yè)。功率變換器是電源和SR 電動機(jī)的接口,在控制器的控制下起開關(guān)作用,使繞組通電或斷電,同時為繞組儲能提供能量回饋的路徑。常見主電路形式有雙開關(guān)型、雙繞組型、電容分壓型、H 橋型和公共開關(guān)型主電路等。功率變換器主電路的選擇和電機(jī)結(jié)構(gòu)以及所選功率器件的電流定額有關(guān)。一般四相8/6極電機(jī)常采用H 橋型主電路,而三相電機(jī)最常用的是雙開關(guān)型主電路。控制器是整個系統(tǒng)的核心和大腦,其作用是綜合處理速度指令、速度反饋信號及電流傳感器、位置傳感器的反饋信息,控制功率變換器主開關(guān)的通斷,實現(xiàn)對SR 電動機(jī)運行狀態(tài)的控制。現(xiàn)在控制器的主控芯片常采用高速16/32位單片機(jī)或數(shù)字信號處理器(DSP),其中DSP 因其硬件資源豐富、功能齊全、性能穩(wěn)定、運算速度快等優(yōu)點,已成為SRD 系統(tǒng)的首選,這里面就包括美國TI公司主推的2407 和2812 系列DSP。檢測器則由位置、電流和速度等檢測環(huán)節(jié)構(gòu)成,提供轉(zhuǎn)子的位置信息以決定各相繞組的開通與關(guān)斷;提供電流信息來完成電流斬波控制或采取相應(yīng)的保護(hù)措施以防止過電流;提供速度信號以保證系統(tǒng)具有優(yōu)良的動、靜態(tài)性能。常用的位置傳感器有光敏式、磁敏式以及接近開關(guān)式等;電流檢測可采用電阻采樣和霍爾電流采樣;速度則可由位置信號經(jīng)過計算得到。這里需要指出的是,位置傳感器的使用增加了系統(tǒng)的復(fù)雜程度,同時有些位置傳感器對使用環(huán)境要求較高,在對錨機(jī)拖動系統(tǒng)進(jìn)行設(shè)計、選用時應(yīng)特別注意。若要避免該問題的產(chǎn)生,也可采用無位置傳感器的SRD 系統(tǒng),通過狀態(tài)觀測器估算轉(zhuǎn)子位置,或是采用脈沖注入法估算轉(zhuǎn)子位置。
3 適應(yīng)錨機(jī)工況要求的SRD 系統(tǒng)控制策略選擇
在不同情況下,以及起、拋錨的不同階段,錨機(jī)的工況有所不同,其中拋錨工況相對簡單,而起錨工況較為復(fù)雜。起錨通常可分為5個階段,即①收起臥鏈、②收緊錨鏈、③拔錨出土、④收起懸鏈、⑤收錨入孔,這5個階段的具體工況如圖2所示。

圖2 錨機(jī)起錨五階段工況示意圖
從圖2可以看出,起錨5階段對轉(zhuǎn)速、轉(zhuǎn)矩都有各自的要求。下面針對這5 個階段的工況要求,為SRD 系統(tǒng)選擇適當(dāng)?shù)目刂撇呗浴R 電機(jī)轉(zhuǎn)速的可控量一般有加于相繞組兩端的電壓US、開通角θon和關(guān)斷角θoff三個參數(shù),其控制方式主要針對以上幾個可控變量來進(jìn)行控制,主要有電流斬波控制方式(CCC 方式)和角度位置控制方式(APC方式)[5]。
(1)CCC控制方式
當(dāng)SR 電機(jī)起動、低、中速運行時,電壓不變,旋轉(zhuǎn)電動勢引起的壓降小,電感上升期的時間長,電流變化率相當(dāng)大,為避免電流脈沖峰值超過功率開關(guān)器件和電機(jī)的允許值,常采用CCC控制模式來限制電流。CCC 控制還可分為定角度斬波模式和變角度斬波模式。定角度斬波模式通常在電機(jī)起動后低、中速運行時采用,導(dǎo)通角保持不變,但相對較小,可用于起錨過程中的收起臥鏈階段;變角度斬波模式通常在電機(jī)起動或低速運行時采用,通過電流斬波控制和改變開通角與關(guān)斷角的大小調(diào)節(jié)轉(zhuǎn)矩,可根據(jù)負(fù)載變化輸出所需的各種轉(zhuǎn)矩,具有軟的機(jī)械特性,適用于收緊錨鏈、拔錨出土和收錨入孔階段。
(2)APC控制方式
在SR 電機(jī)高速運行時,為了使轉(zhuǎn)矩不隨轉(zhuǎn)速的平方下降,在外施電壓一定的情況下,需要通過改變開通角和關(guān)斷角的值獲得所需的較大電流,即APC控制。在APC控制中,一般采用固定關(guān)斷角,改變開通角的控制模式,這種方式適用于收起懸鏈階段,可確保懸鏈回收的快速性。
在起錨過程中,五階段控制方式的選擇和轉(zhuǎn)換可通過軟件進(jìn)行預(yù)先設(shè)置,系統(tǒng)根據(jù)實時反饋信號自動完成,不需人工干預(yù),提高了錨機(jī)系統(tǒng)工作的效率、可靠性和智能化程度。
4 結(jié) 語
SR 電機(jī)結(jié)構(gòu)簡單,又因為繞組電流是直流脈沖,只需整流、無需逆變,所以控制電路簡單。研究表明,基于高速單片機(jī)或DSP 控制的SRD 系統(tǒng)轉(zhuǎn)速大范圍變化時,其系統(tǒng)效率比交、直流變頻調(diào)速系統(tǒng)都高,且啟動轉(zhuǎn)矩大,啟動電流小,過載能力強(qiáng)。雖然低相數(shù)、低齒極數(shù)SR 電機(jī)低速時轉(zhuǎn)矩有些脈動,噪聲和振動較大,但在拖動船用錨機(jī)這類大型船用機(jī)械時并不影響其性能。與此同時,船舶錨機(jī)電力拖動采用SRD 系統(tǒng)后,將更有利于對其進(jìn)行計算機(jī)網(wǎng)絡(luò)管理,有助于實現(xiàn)錨機(jī)的自動控制,提升船舶電氣自動化、智能化和信息化水平。
1 王宏華.開關(guān)型磁阻電動機(jī)調(diào)速控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,1995
2 孫建忠,白鳳仙.特種電機(jī)及其控制[M].北京:中國水利水電出版社,2005
3 邊春元.開關(guān)磁阻電機(jī)驅(qū)動系統(tǒng)的理論和應(yīng)用研究[D].沈陽:東北大學(xué)博士學(xué)位論文,2001
4 曹家勇,陳幼平,詹瓊?cè)A.開關(guān)磁阻電動機(jī)控制技術(shù)的研究現(xiàn)狀和發(fā)展趨勢[J].電機(jī)與控制學(xué)報,2002(3)
5 紀(jì)良文.開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)及其新型控制策略研究[D].杭州:浙江大學(xué)博士學(xué)位論文,2002
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
