直流調速系統穩定邊界法PID校正的設計與仿真
2012-12-23 04:50:58陳貴銀
武漢船舶職業技術學院學報 2012年2期
關鍵詞:系統
陳貴銀
(武漢船舶職業技術學院電氣與電子工程學院,湖北武漢 430050)
雖然直流電動機存在結構復雜、使用及維護成本較高的缺點,但具有調速范圍廣、靜差率小、穩定性好、過載能力大、能承受頻繁的沖擊負載、可實現頻繁的無級快速起制動和反轉等良好的動態性能,因此得到廣泛的應用。廣大研究工作者一直致力于各種控制方法的研究,以期進一步提高直流調速系統的性能。使用PID 校正是目前廣泛應用于直流調速系統有效的控制方法。一般的P I D 控制算法計算復雜,PID 的三個參數確定一直是難點,使用穩定邊界法確定PID 校正器的三個參數就可以簡化計算,確定起來方便,也很實用[1~2]。
1 穩定邊界法PID 校正原理
系統閉環特征方程的根(即閉環極點)都在其復平面虛軸的左側時,閉環系統穩定;當閉環特征方程有純虛根時,系統的根軌跡與虛軸相交,其響應等幅振蕩,系統臨界穩定;只要有一個閉環特征方程的根(即閉環極點)在其復平面虛軸的右側時,閉環系統不穩定。當置PID 調節器的T1=∞與Td=0時,增加kp直至系統開始振蕩,此時系統閉環極點應在復平面的jω軸上,確定系統閉環根軌跡與復平面jω軸交點,求出交點的振蕩角頻率ωn及其對應的系統增益km,則其PID 調節器參數的整定計算公式如表1所示。
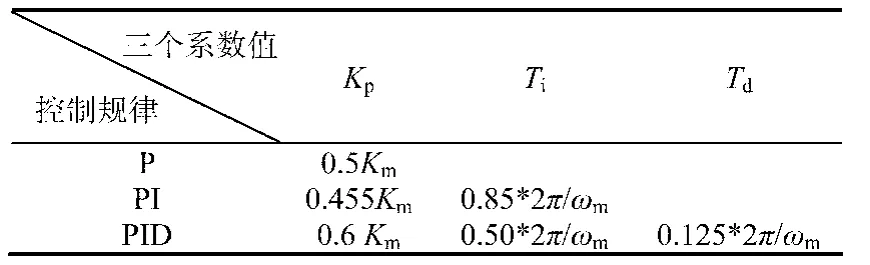
表1 穩定邊界法PID 整定公式
為了實現用穩定邊界法整定公式計算系統P、PI、PID 校正器的參數,在MATLAB中編寫函數文件,下面給出函數Zn02()。其格式為[Gc,Kp,Ti,Td]=zn02(PID,G,p),其中PID 是校正器的類型,當PID=1 時,為計算P 調節器的參數;當PID=2 時,為計算PI調節器的參數;當PID=3 時,為計算PID 調節器的參數。輸入參量G 是已知被校正系統的開環傳遞函數,輸入參量p為系統開環極點的個數(不計重根數,即多重根只計為1 個根)。輸出參量Gc為校正器傳遞函數,Kp為校正器的比例系數;Ti為校正器的積分時間常數;Td為校正器的微分時間常數。如果要使用該函數,則將其存放在MATLAB7.1\Work的路徑與子目錄下,以便查找及調用[3~4]。
2 直流調速系統的組成
直流調速系統的組成框圖可參見圖1所示。由圖1 可見,該系統的控制對象是直流電動機M,被調量是電動機的轉速n,晶閘管觸發電路和整流電路為功率放大和執行環節,由運算放大器構成的比例調節器為電壓放大和電壓(綜合)比較環節,電位器RP1為給定元件,測速發電機TG與電位器RP2為轉速檢測元件,此外還有由取樣電阻RC、二極管VD 和電位器RP3構成的電流截止負反饋環節[3]。
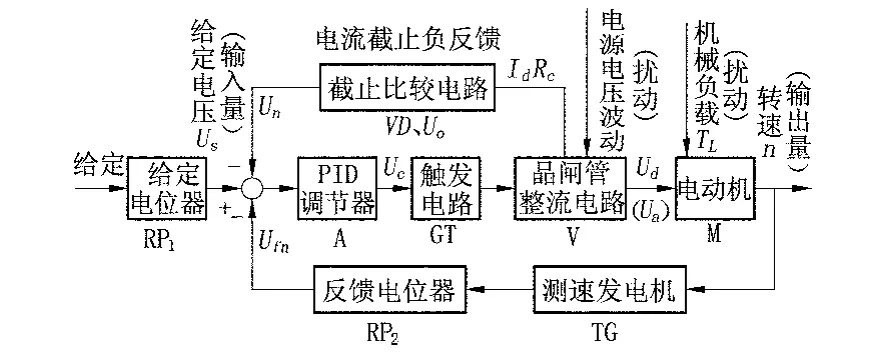
圖1 直流調速系統的組成框圖
3 直流調速系統穩定邊界PID 校正法的仿真設計
現將上述直流調速系統原理框圖進行簡化成如圖2所示結構圖,已知固有的控制系統參數如下。
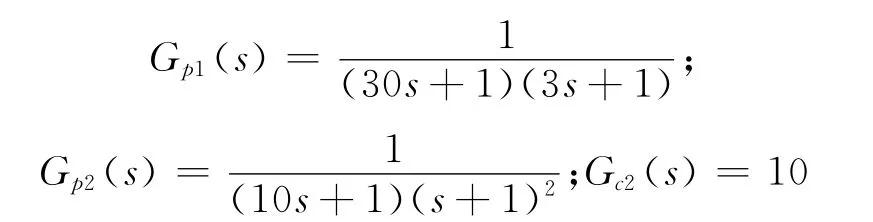
下面用穩定邊界法計算系統主調節器Gc1(s)P、PI、PID 校正時的參數,并進行階躍給定響應的仿真。

圖2 直流調速系統簡化結構圖
根據題意,利用zn02( )函數求系統PI校正器參數的程序L621.m 如下。

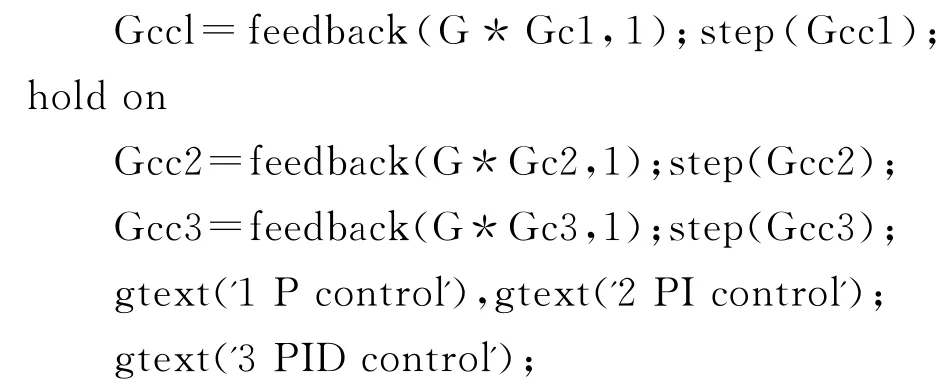
程序須在MATLAB 命令窗口中運行,程序運行后有根軌跡圖3所示,圖上顯示有十字光標,選擇根軌跡與虛軸的交點用鼠標左鍵點擊。再回到MATLAB 命令窗口中,可以見到有計算出的根軌跡增益與極點值(應該力求準確定在根軌跡與虛軸的交點上,盡量使極點實部為0),還可見到字符“K”。應該在字符“K”后鍵入指令“return”后并按下回車鍵,然后即可在MATLAB命令窗口中看到km=1.1436,ωm=0.1646,這就是交點的系統增益km及其對應的振蕩角頻率ωm。在MATLAB命令窗口中還看到用穩定邊界法計算出P、PI、PID 校正的參數。再彈出根軌跡圖,再次鼠標左鍵點擊根軌跡與虛軸的交點,程序三次調用函數zn02.m,即這樣操作三次,最后得到如圖4 所示的PID 三種校正時的階躍給定響應曲線與校正器計算結果。
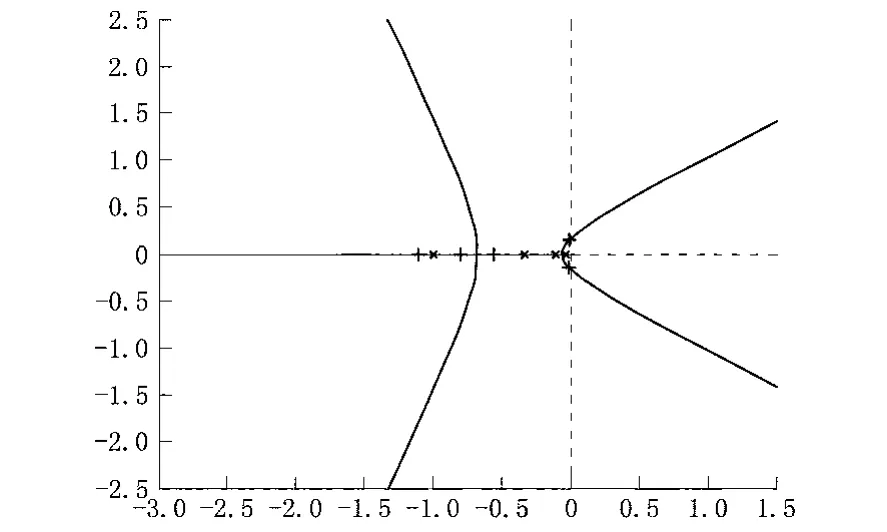
圖3 系統閉環根軌跡圖
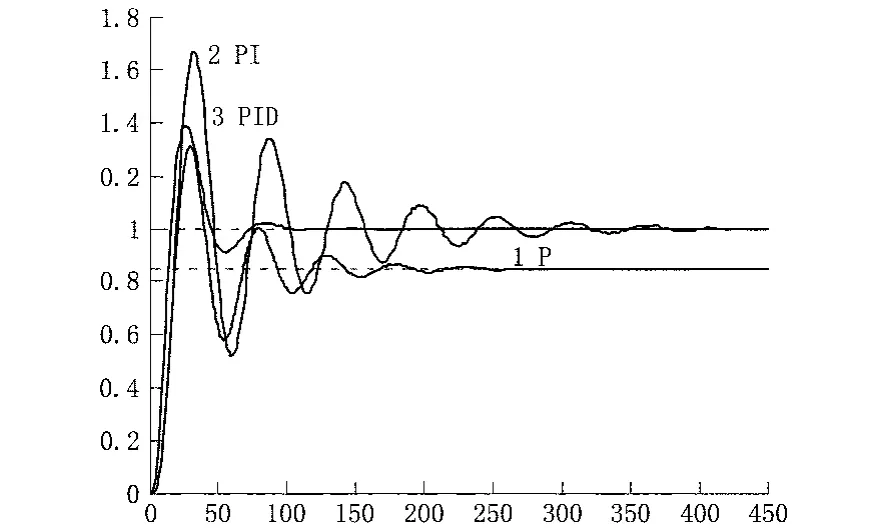
圖4 PID 三種校正階躍給定響應
計算出三種P、PI、PID 校正時校正器的參數分別為:
①P校正器:Gc1=Kp1=0.4682
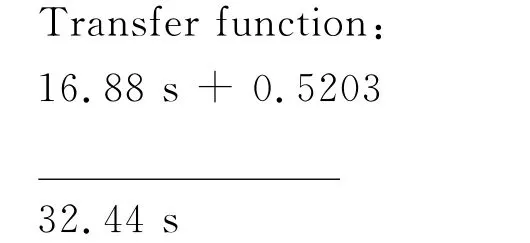
②PI校正器:KP2=0.5203;Ti2=32.4395
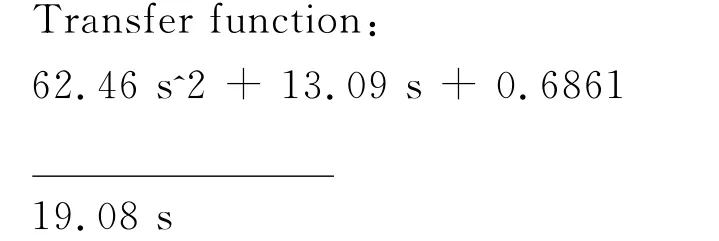
③PID 校正器:KP3=0.6861;Ti3=19.0821;Td3=4.7705
從圖4所示穩定邊界法計算的P、PI、PID 校正階躍給定響應曲線看到,P與PI校正的躍響應曲線上升的速度差不多快,PID 校正得最快;三條曲線有兩個不同的終了值。超調量都較大,以PI校正的為最大[5]。
4 結 語
本文提出了采用穩定邊界法的思想去仿真設計直流調速系統PID 調節器,通過以上具體的仿真實例,說明在控制系統的穩定性、快速性與精度三大性能不能滿足系統需要時,需設置PID 調節器,而PID 調節器的三個參數Kp,Ti與Td的整定一直是個難點,運用穩定邊界法較好地解決這一問題,從以上調試仿真的結果來看,控制系統的動態性能與穩態性能都很理想,控制方法方便實用,值得推廣。
1 楊祖元.雙閉環直流調速系統模糊PID 控制研究[J].計算機應用研究,2011(3).
2 王玉德.模糊PID 的設計與仿真[J].電子技術設計與應用,2010(4).
3 孔凡才.自動控制原理與系統[M].北京:機械工業出版社,2008.158
4 黃忠霖.自動控制原理MATLAB 的實現[M].北京:國防工業出版社.2008.257
5 代忠.基于數字PID電阻熱爐溫度控制系統的設計[J].高教論述.2011(5)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
