基于模糊控制的EPS助力電流決策
2013-01-01 00:00:00宋偉奇丁攀
科技資訊 2013年3期


摘 要:分析了采用模糊控制方法獲得EPS系統目標助力電流的可行性,設計了以轉向盤轉矩傳感器的信號和車速傳感器的信號為輸入,以目標助力電流為輸出的模糊控制器,通過仿真及結果分析驗證了這種方法的可行性。
關鍵詞:模糊控制 電流決策
中圖分類號:U463 文獻標識碼:A 文章編號:1672-3791(2013)01(c)-0003-02
在EPS系統中助力電動機輸出的助力電流值是根據助力的特性曲線來確定的,因此助力特性曲線決定了EPS系統的性能。常用的助力特性曲線有直線型,折線型和曲線型,在設計是根據不同的設計要求選用不同的助力特性曲線類型[1]。本文介紹采用模糊控制方法獲得目標助力電流。
1 采用模糊控制的可行性
車輛的速度直接影響了操縱轉向盤上力的大小。根據經驗顯示,車速越快,操縱轉向盤所需的轉向力就越小。因此設計的電動助力轉向系統就需要依照車速的變化而不斷地調整助力系統的模式。但是想要為車速提供一個精確的助力模式卻又是不現實的,因為通常的電動助力控制系統是采用單片機的控制系統,大量的數據處理顯然是不合情理的[1]。此外,車速高低是由駕駛人員的經驗和習慣來進行判斷的,而駕駛人員也只是大概對車速的敏感度存在一個區間和范圍。因此,對車輛速度精確的劃分也是不必要的。
再者,因為EPS轉向系統是隨動系統[2],而其提供輔助力的大小是依據駕駛員對轉向盤上操縱力矩的大小來確定的,但施加在轉向盤上的操縱力矩也和駕駛員自身的經驗是密不可分的,并且考慮到轉向軸扭桿自身物理特性的影響,所以對轉矩進行的精確定量處理就不必要了。
同時,應用模糊控制實現也比較容易,實時性也很好[4]。這樣不僅能夠使所設計的系統更能夠清晰地體現出系統在實際應用中的具體情形,還能夠在很大程度上減輕處理器的負荷。
2 助力電流模糊控制器的建立
我們確定模糊控制器的輸入量分別為轉向盤轉矩傳感器的信號Td和車速傳感器的信號V,輸出量是電動機的助力電流I。形成一個雙輸入—單輸出的模糊控制器。
EPS系統助力電流模糊控制器的建立過程如以下幾點。
2.1 輸入、輸出變量的模糊化
根據電動助力轉向系統的要求,本論文中的轉向系統設定開始助力的方向盤輸入力矩為1 Nm,即當方向盤的輸入扭矩小于這個值時,EPS是不進行助力的。設定10 Nm作為助力電流上升的閥值,即方向盤輸入力矩大于此閥值后電機電流保持最大值,且電動機在整個車速范圍內提供助力。在助力電流決策的模糊控制系統中,輸出變量為電動機的助力電流I。可設Td的論域為[1,10],單位Nm,V的論域為[0,120],單位km/h。設I的論域為[0,28],單位A。對各個輸入變量和輸出變量用自然語言進行模糊化,設定變量模糊語言值。
轉矩Td的模糊語言論域為:{PB(很大),PM(大),PS(較大),ZE(適中),NS(較小),NM(小),NB(很小)};車速V的模糊語言論域為:{PB(很快),PM(快),PS(較快),ZE(適中),NS(較慢),NM(慢),NB(很慢)};電流I的模糊語言論域為:{PB(很大),PM(大),PS(較大),ZE(適中),NS(較小),NM(小),NB(很小)}。
2.2 輸入、輸出變量隸屬度函數的確定
隸屬度函數應該是連續的對稱的,常用的基本隸屬度函數有:三角形、梯形、鐘形、高斯型和Sigmoid型。隸屬度函數的形狀對整個控制系統控制效果的影響較小,為了達到設計簡便及實時計算的要求,轉矩Td和車速V各語言值的隸屬度函數均采用梯形隸屬函數。如圖1~3所示。
2.3 模糊規則及模糊推理的制定
模糊規則的制定是模糊控制器的核心,是模糊推理的依據。本系統中,根據EPS系統對助力特性曲線的要求以及駕駛員的經驗,得出49條控制規則,采用以下表述形式:
If Td =PB and V =ZE then I =PB
上述規則的意義是:如果轉向盤輸入力矩Td很大但此時車速V很小,則此時電動機的輸出助力電流I應取一個很大的值。將得到的類似形式全部49條控制規則制成一個表,反映轉向盤輸入轉矩Td、車速V及助力電流I三者關系的模糊規則表,如表1所示。本研究中采用Mandani直接推理法。
2.4 反模糊化
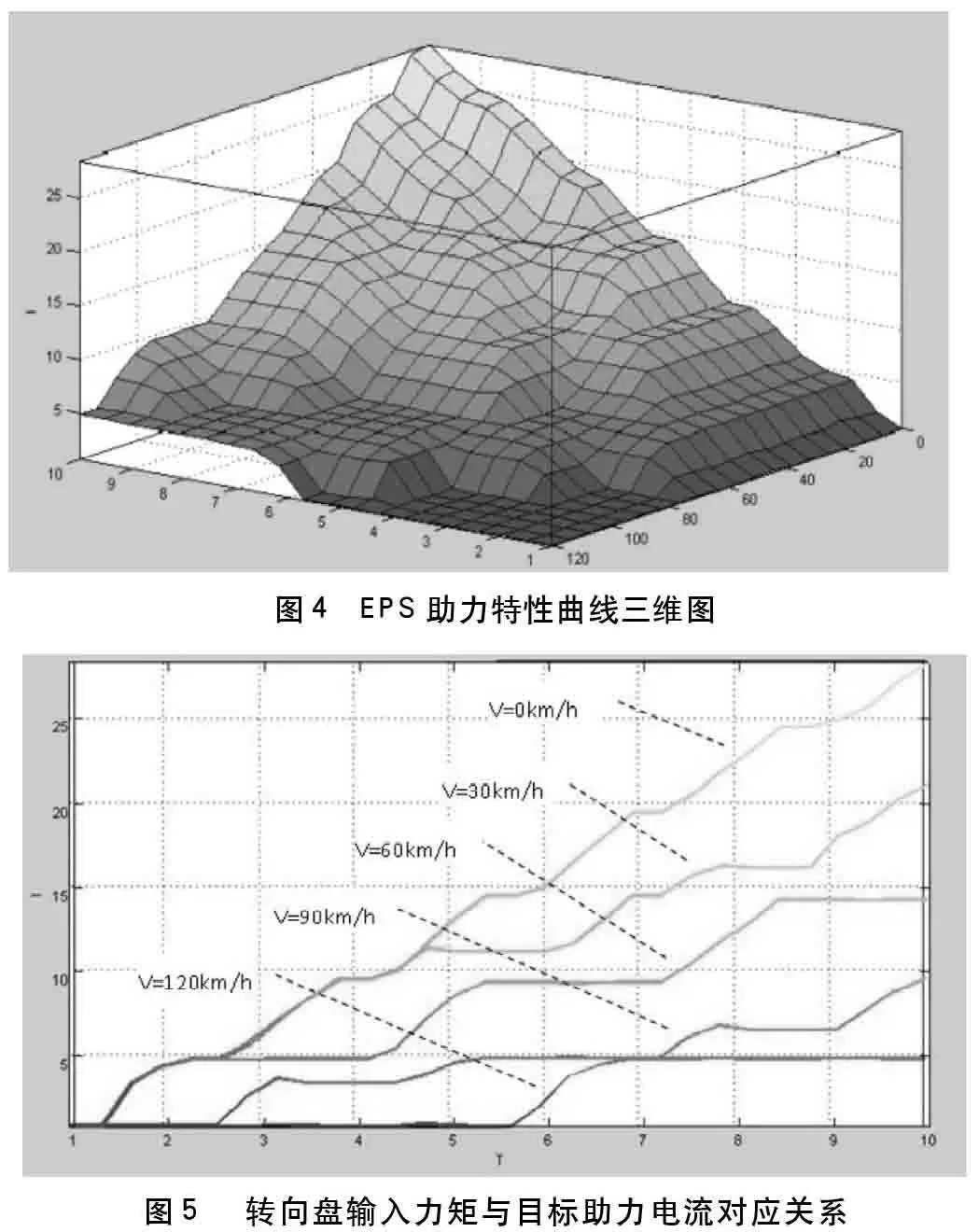
反模糊化有多種方法,常用的有最大隸屬度函數法、取中位數法及加權平均法(或重心法)。本系統反模糊化采用加權平均法(重心法)。這樣,整個模糊控制器的設計就完成了。如圖4所示。
3 仿真結果分析
通過對助力電流的模糊控制器參數的調整,如調整隸屬度函數或改變模糊規則等,可以得到EPS系統助力特性曲線,如圖4所示。三維助力特性曲線能夠直觀地反映任意車速與任意轉向盤力矩輸入下的助力目標電流的值。
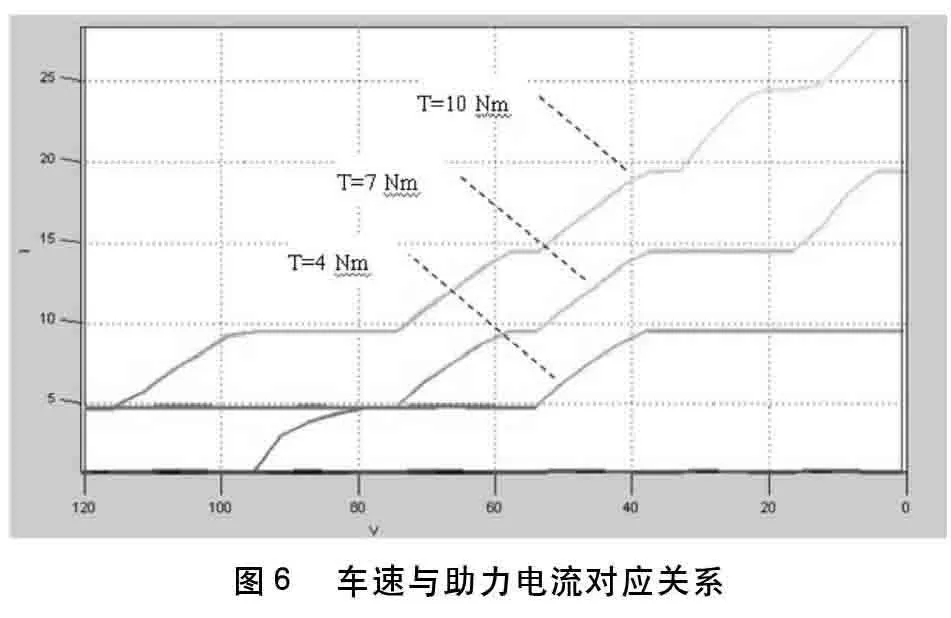
通過分析EPS助力特性曲線三維圖,可得根據不同的車速以及不同的轉向盤輸入力矩獲得相對應的EPS系統助力電流關系,如圖5、6所示。
綜合分析圖5和圖6,研究不同轉向盤輸入力矩和不同車速與助力目標電流的對應關系。
(1)從圖5我們可以看出:任意車速下,目標助力電流會隨著轉向盤輸入扭矩的提高而增大,直到達到目標電流的閥值,使駕駛員獲得良好的轉向助力,提高了轉向輕便性和駕駛舒適性;車速越高,電機開始提高助力所需要的轉向盤輸入力矩就越大,即使車速為零,同樣需要轉向盤輸入力矩達到一定值,才產生助力電流,開始提供助力,這是為了防止助力過于靈敏,使駕駛員通過方向盤獲得一定的路感,提高駕駛的安全性。
(2)從圖6我們可以看出:在扭矩一定的情況下,目標助力電流會隨著車速的提高而減小,既助力值隨車速提高而減小,這是為了使駕駛員在車輛高速行駛時保持良好路感,防止誤操作引發車輛側傾的危險;車速越低,需要的目標助力電流值越大,使低速轉向更加輕便。
4 結論
通過上述分析表明,研究設計的助力電流模糊決策控制基本達到了EPS系統對助力特性曲線的要求,具有一定的可行性。同時文章設計的助力電流模糊決策控制具有一定靈活性,通過對各個輸入量、輸出量相應論域、模糊推理規則及隸屬度函數的修改,可以使控制器匹配不同的EPS系統。
參考文獻
[1]王雄波.基于模糊控制的電動助力轉向系統的研究與開發[D].湖南大學碩士學位論文,2008.
[2]盧娟.電動助力轉向系統建模與仿真研究[D].重慶大學碩士論文,2006.
[3]Ji Hoon Kim,Jae Bok Song.Control logic for electric Power steering system using assistmotor[J].Mechatronies,2002,12(3):447-459.
[4]石新民,郝正清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社,北京交通大學出版社,2008,2:7-9,93-95.