船舶姿態信號采集專用開關器的設計與實現
2013-01-01 00:00:00黃浩
科技資訊 2013年3期

摘 要:在采集雙慣導系統姿態信號時,為減少模數轉換電路的數量、優化采集電路結構,設計了一種以單片機為控制器的船舶姿態信號采集專用開關器,實現了2×30線、6×10線兩種開關功能,滿足了船舶姿態信號采集的需求。
關鍵詞:船舶 姿態信號 開關器 慣導
中圖分類號:TB47 文獻標識碼:A 文章編號:1672-3791(2013)01(c)-0008-02
平臺式慣性導航系統是以平臺坐標系為基準,通過旋轉變壓器或感應同步器等角度測量傳感器連續地測量平臺坐標系與船舶載體坐標系之間的角度信號,輸出船舶航向、水平等姿態信號的重要導航設備[1]。慣導系統中有3個角度測量傳感器,安裝在慣性平臺的方位軸、縱搖軸、橫搖軸上,分別輸出航向、縱搖、橫搖姿態信號[2]。為分析、研究船舶的運行狀況和慣導系統的工作狀態,需要對角度測量傳感器輸出的模擬姿態信號進行采集。在雙慣導系統條件下,共有6個姿態信號,在直接采集時需要6路模數轉換電路,采集系統的電路結構復雜、成本高。為減少模數轉換電路數量、優化采集系統電路結構,本文以單片機為控制器,設計了一種船舶姿態信號采集專用開關器,實現2×30線、6×10線兩種開關功能。當專用開關器配置為2×30線開關時可選通雙慣導系統中一臺慣導系統的3個姿態信號,當配置為6×10線開關時可選通6個姿態信號中的1個姿態信號,滿足了雙慣導系統條件下船舶姿態信號采集的需求。
1 專用開關器方案設計
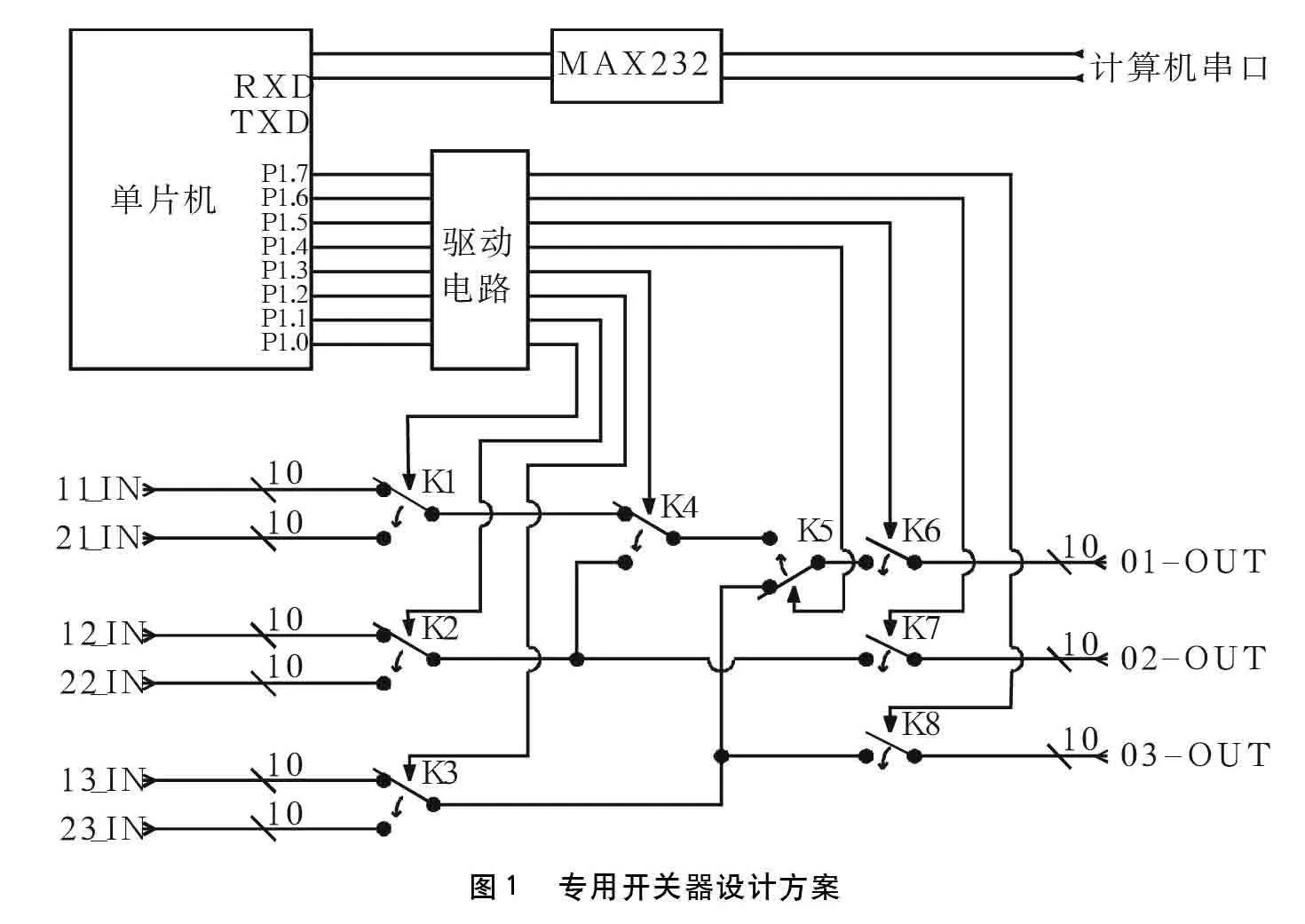
根據雙慣導系統姿態信號采集的需求,設計專用開關器的方案如圖1所示。在該設計方案中,共有6個輸入11_IN、12_IN、13_IN、21_IN、22_IN、23_IN,可分別輸入1#慣導系統的航向、縱搖、橫搖信號與2#慣導系統的航向、縱搖、橫搖信號;共有3個輸出01_OUT、02_OUT、03_OUT,通過對應的連接配置,01_OUT可輸出6個輸入信號中的任何一個,02_OUT只能輸出12_IN或22_IN,03_OUT只能輸出13_IN或23_IN。
在專用開關器中,單片機作為控制器,通過串口通信電路接收計算機的指令,控制K1、K2、K3、K4、K5、K6、K7、K8等8組開關的通斷設置,實現2×30線、6×10線兩種開關功能。其中,K1、K2、K3的作用是從雙慣導系統的兩組姿態信號中選出其中一組姿態信號,K4、K5的作用是從航向、縱搖、橫搖3個信號中選出一個姿態信號,K6、K7、K8的作用是姿態信號輸出控制。
2 硬件電路設計
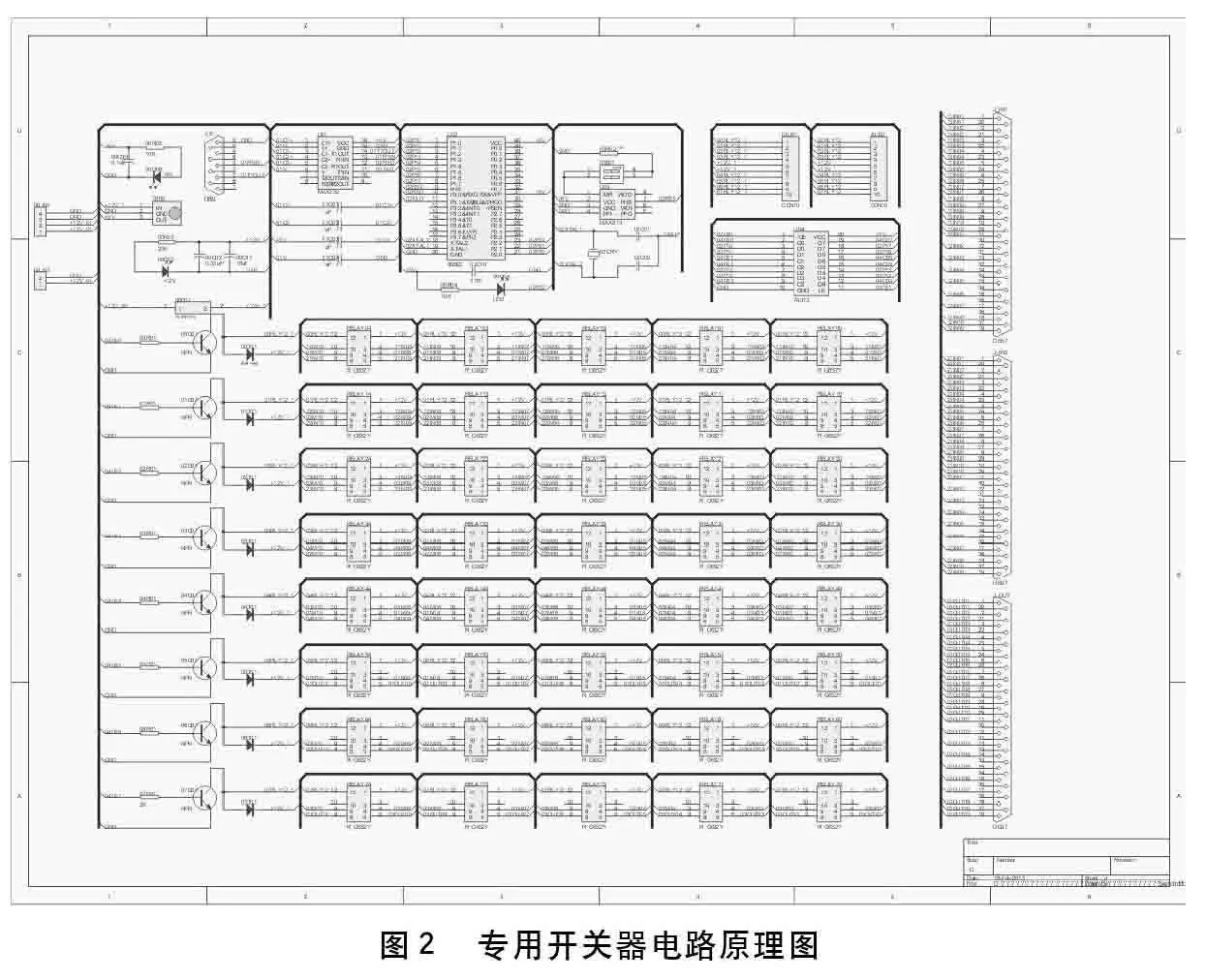
根據船舶姿態信號采集專用開關器設計方案,制作開關器電路如圖2所示。
其中,控制器為89S52單片機;8個開關組由40只G6S-2-Y歐姆龍繼電器組成,每組開關器有5個繼電器;驅動電路由晶體管、電阻等元器件構成;串口通信電路由MAX232芯片實現;外接的工作電源為+12VDC,并通過三端穩壓器產生+5VDC電壓,作為單片機工作電源。
3 單片機程序設計
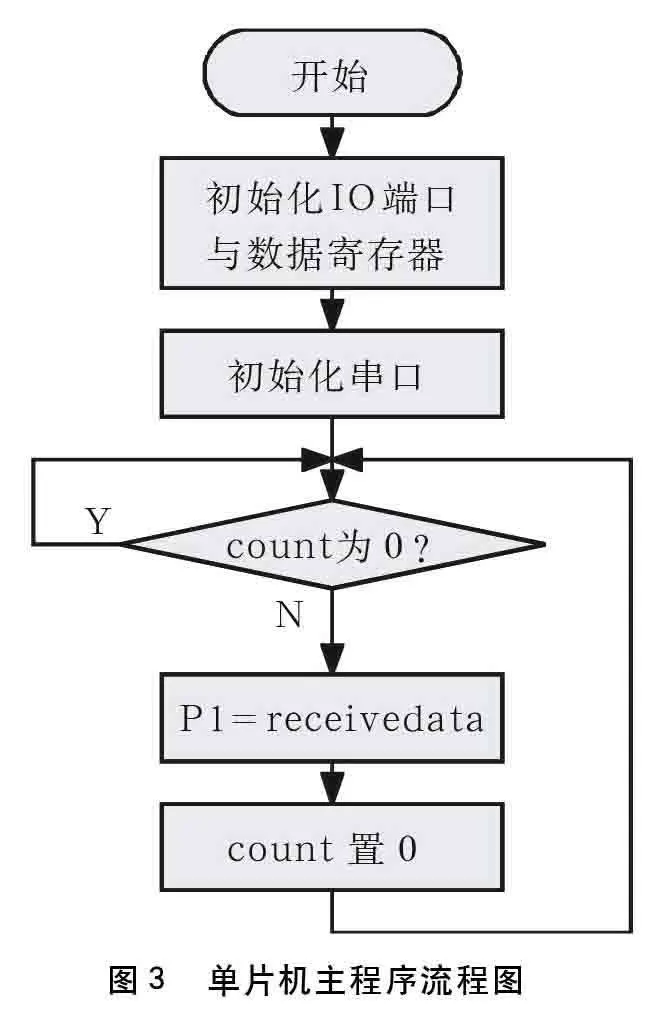
根據專用開關器的設計方案與硬件電路,設計了單片機的主程序與串口中斷程序,流程圖分別如圖3,4所示。其中,count與receivedata是全局變量,count為指令標識,receivedata為指令數據。當count為1時表示目前寄存器receivedata中的指令未執行,為0時表示指令已經執行。在單片機主程序中,設置串口通信工作在方式1、波特率為9600。
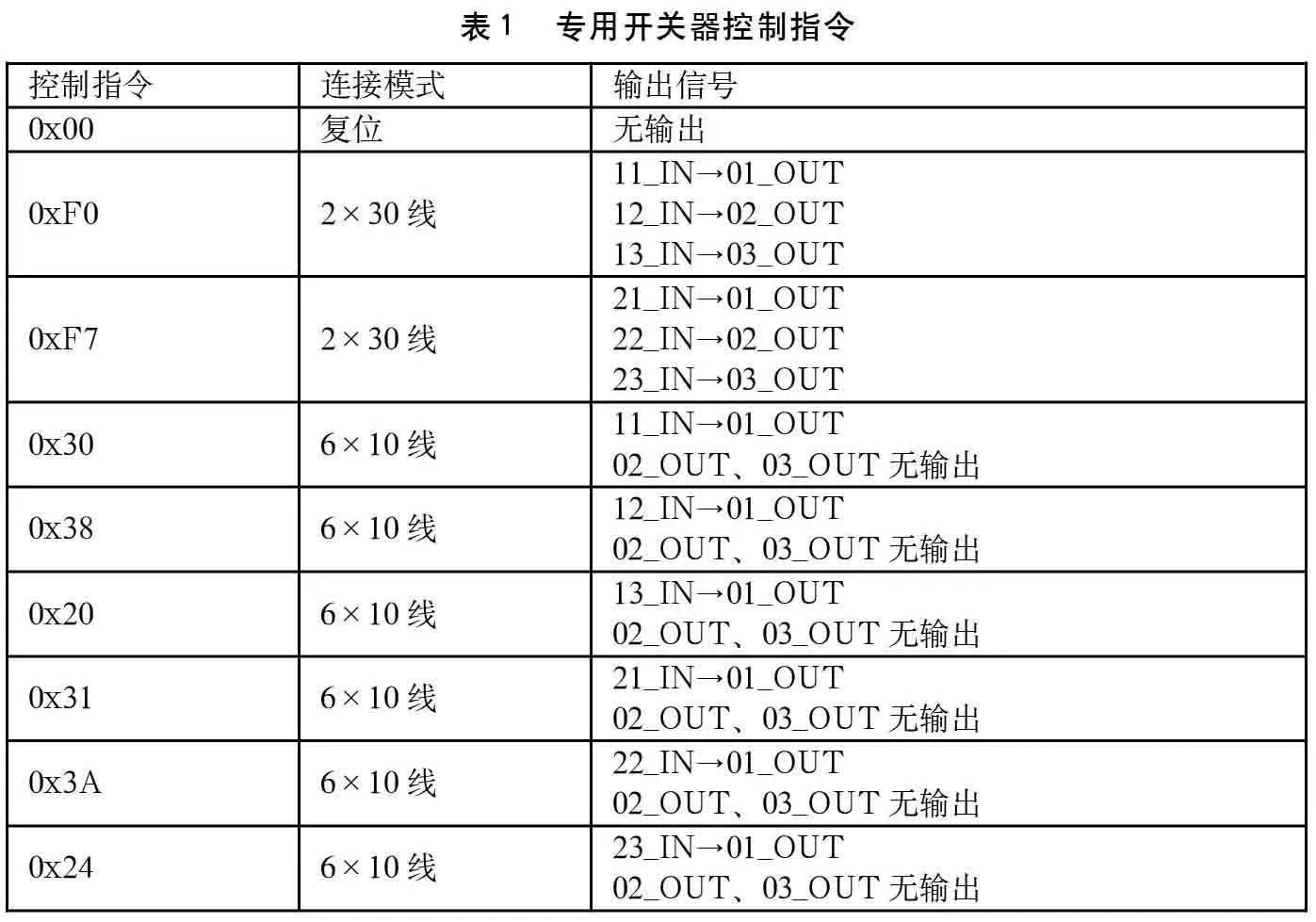
根據專用開關器硬件電路與軟件程序,設置控制指令如表1所示。在專用開關器設置為2×30線開關時,01_OUT、02_OUT、03_OUT分別輸出11_IN、12_IN、13_IN或21_IN、22_IN、23_IN;在設置為6×10線開關時,01_OUT 輸出6個輸入信號中的一個信號,02_OUT、03_OUT無輸出信號。
4 結語
針對雙慣導系統條件下船舶姿態信號采集的需求,本文設計了一種專用開關器。該專用開關器以單片機為控制器,以40只G6S-2-Y繼電器組成8個開關組,實現了2×30線、6×10線兩種開關功能,滿足了船舶姿態信號采集的需求。
參考文獻
[1]秦永元.慣性導航[M].北京:科學出版社,2006:133-142.
[2]李安,胡柏青.平臺羅經[D].武漢:海軍工程大學,2003:63-69.
[3]李廣弟.單片機基礎[M].北京:北京航空航天大學出版社,1993:177-184.