基于脈沖液流換能器的振動能量回收原理與實驗研究
2013-02-13 06:35:54袁四美廖昌榮趙丹俠
振動與沖擊 2013年8期
袁四美,廖昌榮,趙丹俠,劉 瓊,韓 亮
(重慶大學 光電技術及系統教育部重點實驗室智能結構中心,重慶 沙坪壩 400030)
近年來,磁流變液阻尼器在建筑結構振動控制領域得到廣泛應用,并取得了良好的控制效果。磁流變液阻尼器依靠外加電源來實現阻尼通道的勵磁,控制磁流變液的流變學特性,以實現其阻尼參數的調節。在臺風、海嘯與地震等自然災害條件下,建筑結構的供電系統失效的可能性極大,依靠振動能量來為磁流變液阻尼器供電,實現自供電磁流變阻尼調節系統是磁流變技術領域和振動控制領域研究的前緣課題,其關鍵技術之一是振動能量的回收技術。自20世紀90年代開始,國內外研究學者就對饋能式減振系統進行了大量的研究。Choi等[1]提出一種基于電磁線圈感應式磁流變阻尼器的自供電減振系統;陳政清等[2-3]提出了一種自供電磁流變智能減振系統,該系統由齒條齒輪加速器帶動永磁直流電機,完成結構振動能量到磁流變阻尼器所需的電能的轉換;Choi等[4]設計了采用齒條齒輪加速器、直流發電機自供能的電流變阻尼器;孫作玉等[5-6]設計制作了靜液蓄能式隔震換能系統;武漢理工大學的徐琳等[7-8]提出了一種基于液壓傳動的液電饋能式液壓減振器系統。鑒于橋梁結構振動能量大、振動頻率低和振幅較大等特點,在減振器運行過程中工作缸內兩腔形成低頻脈沖壓力,該脈沖液流攜帶能量表現為壓力能和動能。因此,研究基于低頻脈沖液流換能器的振動能量回收方法,對自供電型磁流變液阻尼系統的應用具有重要的學術價值。
1 換能器工作原理
如圖1所示,振動能量回收系統由液壓油缸、液壓齒輪馬達、三相永磁同步發電機、飛輪、電壓處理電路組成,其中,液壓馬達、飛輪、永磁發電機組成脈沖液流換能器。油缸、液壓馬達和單向閥 v1,v2,v3,v4,v5,v6組成的封閉液壓回路。單向閥v1、v2、v3、v4連接于液壓馬達進出油口與油缸之間,保證液壓馬達單向旋轉;單向閥v5、v6連接于液壓馬達泄油口與液壓缸之間,使馬達泄漏的油液流回油缸。當外界振動引起油缸活塞桿運動,以活塞桿向左運動(壓縮行程)為例。活塞推動油液向左流動,將振動能轉換為液壓能,產生脈沖液流,油缸左腔壓力高于右腔,單向閥v1、v4、v6開啟,油液經導油管流向液壓馬達,一部分油液通過馬達泄油口經單向閥v6流回液壓缸;另一部分油液推動齒輪馬達轉動,然后經單向閥v4流回油缸。同理,在活塞桿向右運動時,單向閥v2、v5、v3開啟。馬達將一部分液壓能轉換為機械能,帶動飛輪與永磁發電機轉動。飛輪將旋轉的機械能轉換為高速轉動的動能,發電機將機械能轉換為電能,經電壓處理電路后為蓄電池充電或向外供電。
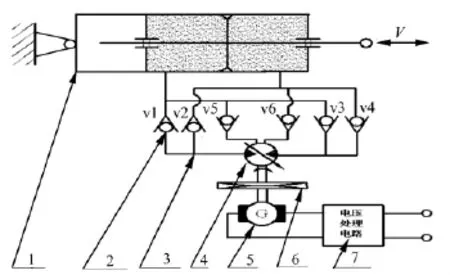
圖1 基于脈沖液流換能器的能量回收系統裝置圖Fig.1 The energy harvesting system schematic diagram based on pulse fluid flow transducer
2 能量轉換器回收理論分析
脈沖液流換能器工作簡化圖如圖2所示。流入馬達的總流量記為Qg,泄漏量記為ΔQ;推動馬達轉動,然后從出油口流出的這部分流量記為Qm。馬達帶動飛輪與發電機旋轉,馬達與飛輪、發電機同軸相連,旋轉角速度分別為ωd,ωf,ωd,馬達與發電機轉矩分別記為Tm,Td,馬達、飛輪、發電機的慣量記為Jm,Jf,Jd。

圖2 脈沖液流換能器模型Fig.2 The model of the pulse fluid flow transducer
2.1 流量分析模型
設工作缸內活塞以正弦運動,位移為x=xmsin(ωt),速度為v=dx/dt,其中,xm為活塞振幅,ω=2πf為活塞振動角頻率,f為活塞振動頻率。
忽略油缸的泄露,流入馬達的流量為活塞推動油液流動產生的流量:

式中:A為活塞有效面積。
根據齒輪馬達的工作原理,忽略馬達齒面接觸處(嚙合處)的泄漏,馬達的泄漏量為:
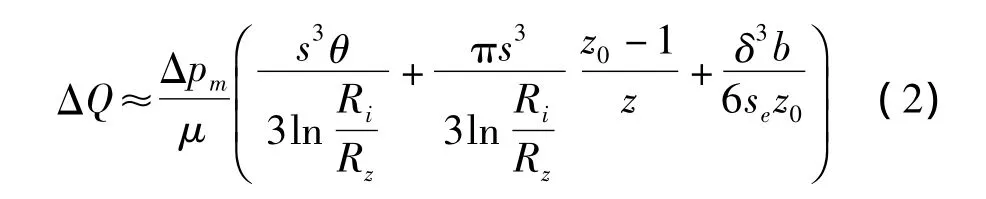
式中:s為齒輪端面間隙;θ為高壓腔包角;μ為油液的動力粘度;Ri齒根圓半徑;Rz齒輪軸半徑;z0為過渡區的齒數;z為馬達齒數;b為齒寬;δ為齒頂間隙;se為齒頂厚;Δpm為馬達進出油口壓差。推動馬達轉動,將液壓能轉換為機械能的流量表示為

式中:q為馬達的理論排量。根據流量連續方程,有Q=Qg=ΔQ+Qm,得到:

2.2 力學分析模型
馬達與飛輪、飛輪與永磁發電機之間為剛性連接,則馬達、飛輪、發電機的角速度相同:

油液推動馬達旋轉,馬達將液流能轉換為機械能,帶動飛輪與發電機轉動,馬達的輸出轉矩為:

式中:bm為馬達的粘滯阻尼系數。
忽略發電機的空載轉矩,則發電機轉矩僅由電磁轉矩構成:

由于液流不穩定,必須考慮慣性轉矩,則力矩平衡方程為:

等式右端第一項為馬達慣性轉矩,第二項為飛輪慣性轉矩,第三項為發電機的慣性轉矩。
根據式(4)、(5)、(8)得到:

利用Matlab進行仿真,所涉及的參數如表1。
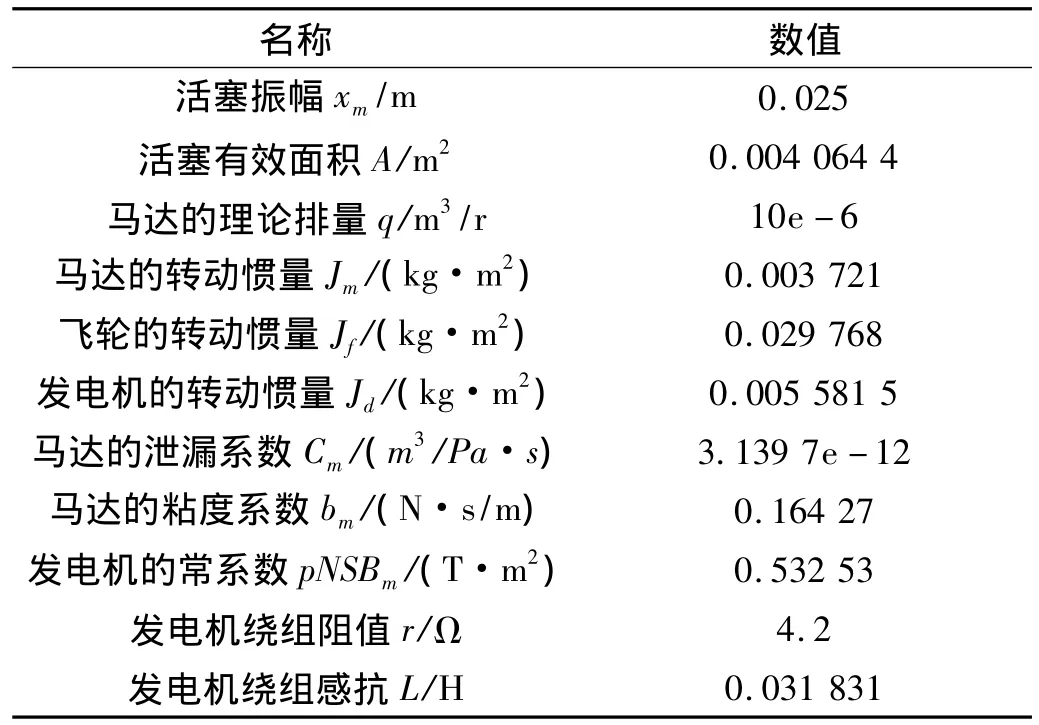
表1 脈沖液流換能器仿真參數表Tab.1 Simulation parameters of the pulse fluid flow transducer
圖 3(a)為R=30 Ω,f=2 Hz、3.2 Hz、4.8 Hz、6 Hz情況下發電機角速度波動圖。由圖可以發現,在相同負載下,頻率越大,角速度幅值越大。圖3(b)為f=3.6 Hz,R=1 Ω、30 Ω、150 Ω 與空載情況下發電機角速度波動圖。由圖可知,在同一頻率下,空載時角速度幅值最大,帶負載情況下,阻值越大發電機角速度幅值越大。
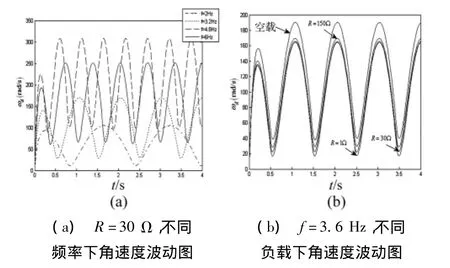
圖3 發電機角速度波動圖Fig.3 The angle speed fluctuation diagram of generator
2.3 電氣分析模型

發電機三相接負載R,采用Y型接法。發電機單相輸出電壓為:

帶載情況下,發電機單相輸出功率為:

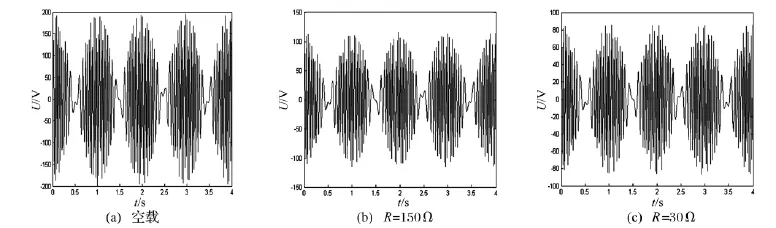
圖4 發電機單相輸出電壓特性仿真圖Fig.4 Simulation diagrams of generator's single-phase output voltage characteristic
圖 4 為f=3.6 Hz,空載,R=150 Ω、30 Ω 情況下,發電機單相電壓輸出特性。由圖可知,電壓幅值分別為196.5 V,113.2 V,85.76 V,空載時發電機輸出電壓幅值最大。圖5 為f=3.6 Hz,R=150 Ω、30 Ω 情況下,發電機瞬時功率特性。通過計算得到其平均功率分別為 20.86 W,49.52 W。
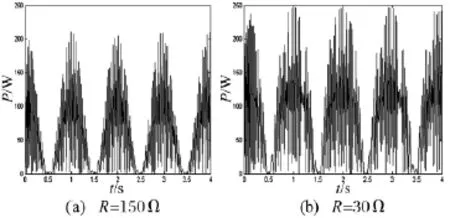
圖5 發電機瞬時輸出功率特性仿真圖Fig.5 Simulation diagrams of generator's instantaneous output power characteristic
2.4 轉換效率分析模型
發電機三相總的輸出功率為:

在T時間內,發電機輸出電能為:

外界振動推動活塞運動,將振動能轉換為液流能,在T時間內,產生的液流能為:

式中:Δp為液壓缸內高低壓腔壓差。
忽略導油管沿程壓差損失,有Δp=Δpm。能量轉換器的轉換效率為:
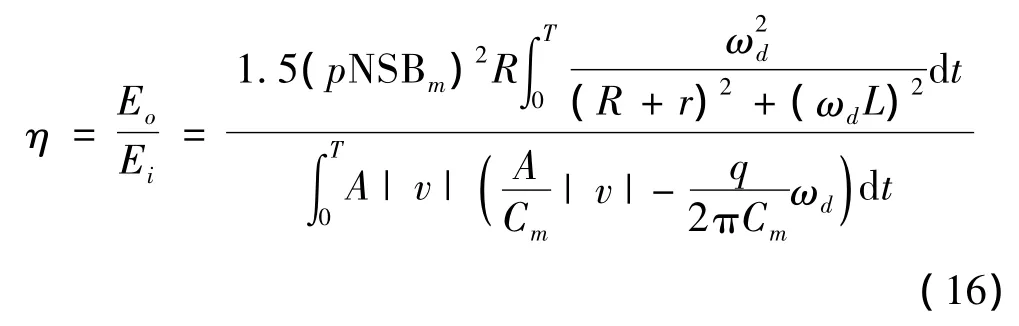
由式(16)可知,換能器的轉換效率由負載與活塞頻率決定。圖6為換能器在不同頻率、不同負載下的轉換效率。由圖可得出結論,在同一負載下,換能器隨著頻率的增加而減小;在同一頻率下,換能器隨著負載的增大先增大后減小。
3 實驗測試
為了檢驗理論分析的正確性,將減振器換能系統在J95-I振動測試平臺上進行測試,實驗裝置圖如圖7所示。試驗用齒輪馬達型號為GM5,永磁發電機型號FF-50W,示波器型號DPO2012。實驗現場如圖7所示。
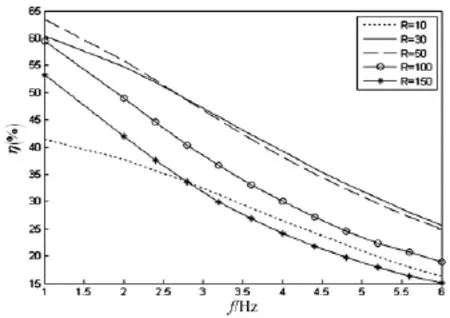
圖6 能量轉換效率仿真圖Fig.6 The simulation diagram of energy conversion efficiency
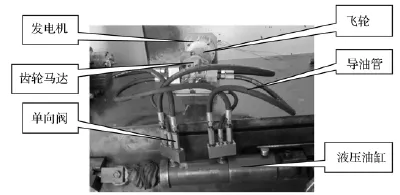
圖7 振動能量回收裝置圖Fig.7 The vibration energy harvesting device diagram
采用正弦激勵振動,振幅為 ±25 mm,頻率為:2 Hz,2.4 Hz,2.8 Hz,3.2 Hz,3.6 Hz,4 Hz,4.4 Hz,4.8 Hz,5.2 Hz,5.6 Hz,6 Hz。分別在空載、帶載情況下,對換能器進行實驗測試。
3.1 發電機輸出電壓與輸出功率特性
圖8 為f=3.2 Hz,空載,R=150 Ω、30 Ω 的情況下測試的電壓輸出特性。從圖中可以看出,最大輸出電壓分別為178 V,104 V,80 V;在帶載情況下,發電機出現停轉;帶負載阻值越大,發電機停轉時間反而越短。發電機產生停轉的主要原因有:油液回路中油液不滿,活塞運動出現空程;活塞運動速度較小時,所提供的能量不能帶動馬達轉動。與仿真圖4相比,其波形幅值要小,主要由于系統摩擦損耗、發電機空載損耗、導油管沿程損耗等造成的;在單幅圖中一個周期內波形不對稱,這是由于油液不滿,發電機開始轉動時,活塞運動速度不為零造成的。
圖9為實測發電機瞬時功率,與仿真圖5相比,一個實測周期內的瞬時功率圖窄于仿真圖,主要由油液不滿、活塞運動產生的阻尼力不足以帶動馬達轉動,發電機出現停轉導致的;每個周期實測瞬時功率不相同且幅值小于仿真值,從上面的分析可知,主要是由于系統存在摩擦損耗、空載損耗、導油管沿程損耗等情況造成的。經過計算其平均功率分別為5.82 W,12.53 W。
由實測電壓及瞬時功率圖可以說明該換能方案是可行的,換能器能將部分振動能轉換為電能。
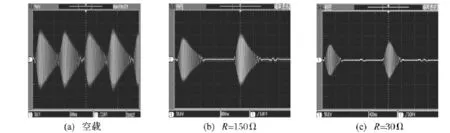
圖8 發電機輸出電壓特性實測圖Fig.8 Experimental test diagrams of generator's output voltage characteristic
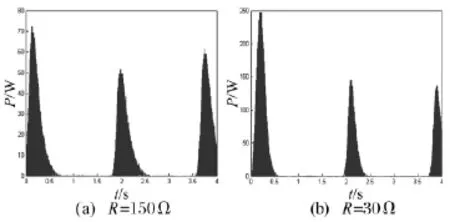
圖9 發電機輸出瞬時功率實測圖Fig.9 Experimental test diagrams of generator's instantaneous output power
3.2 換能效率
圖10為不同頻率下的換能效率測試與仿真對比圖。由圖可以看出:在同一負載下,隨著活塞頻率的增大換能系統的效率減小;在同一頻率下,R=30 Ω時的效率大于R=150 Ω時的效率。活塞頻率越大換能效率越低的主要原因有:活塞頻率越大,發電機轉子角頻率越大,發電機的繞組感抗越大,導致負載上分壓減小,發電機輸出功率減小;活塞頻率增大,馬達泄漏量增加,馬達輸出功率減小,使得發電機輸入功率減小。
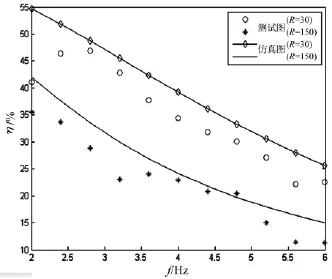
圖10 換能效率Fig.10 Energy conversion efficiency
仿真值與實測值吻合較好,但還存在著一定誤差,分析主要原因:沒有考慮系統的摩擦、導油管沿程等損耗;沒有考慮發電機機械損耗、鐵芯損耗和雜散損耗;仿真計算參數,特別是泄漏系數取值存在一定誤差;存在測試誤差等。
從實驗值可以看出,效率最大可以達到46.85%,由計算可以得到發電機三相最大總輸出平均功率可以達到37.4 W。
4 結論
為了擺脫MR阻尼器控制系統對外界電源的依賴,本文提出了一種基于脈沖液流換能器的能量回收方案,在供電失效的情況下,能為其供電。在本文中,分析了換能器的工作原理,對系統進行理論仿真,并進行實驗測試。通過理論分析與實驗研究得到以下結論:
(1)理論仿真圖與實測圖能較好的吻合,說明理論分析是合理的。
(2)該換能器方案是可行的,能將部分振動能轉換為電能,在帶30 Ω電阻的情況下,轉換效率可達到46.85%,最大輸出功率可以達到37.4W。
(3)從理論分析可知,換能器的效率會隨振動頻率與負載變化,可通過改變負載來進行調節。
針對換能系統存在的問題,接下來要做的有:對系統進行優化,增加系統的穩定性;解決油液不滿的問題;根據發電機輸出電壓特性設計穩壓電路,為蓄電池充電等。
[1] Choi K M,Jung H J,Lee H J.Feasibility study of an MR damper-based smart passive control system employing an electromagnetic induction device[J].Smart Mater.Struct,2007,16(6):2323-2329.
[2]陳政清.自供電磁流變智能減振系統[P].中國專利,CN:101086179,2007.
[3]汪治昊,陳政清.基于自供電磁流變阻尼器的隔震高架橋半主動控制[J].地震工程與工程振動,2010,30(1):126-133.
WANG Zhi-hao,CHEN Zheng-qing.Semi-active control of isolated elevated highway bridge with self-powered MR damper[J].Journal of Earthquake Engineering and Engineering Vibration,2010,30(1):126-133.
[4] Choi S B,Seong M S,Kim K S.Vibration control of an electro-rheological fluid based suspension system with an energy regenerative mechanism [J].Journal of Automobile Engineering,2009,223(4):459-469.
[5]孫作玉,程樹良,王煥定.隔震換能系統的換能效率及振動控制效果研究[J].工程力學,2005,22(2):132-136.
SUN Zuo-yu,CHENG Shu-liang,WANG Huan-ding.Study on energy transition efficiency and control effect of base-isolated structure with transducer[J]. Journalof Engineering Mechanics,2005,22(2):132-136.
[6]程樹良,王煥定,孫作玉.隔震換能系統換能效果實驗研究[J].工程力學,2006,23(11):38-44.
CHENG Shu-liang, WANG Huan-ding, SUN Zuo-yu.Experimental study on effect of energy transition of baseisolation with energy transducer system[J].Journal of Engineering Mechanics,2006,23(11):38-44.
[7] Xu L,Guo X X.Hydraulic transmission electromagnetic energy-regenerative active suspension and its working principle[C].Second Global Congress on Intelligent System,2010:58-61.
[8]徐 琳.汽車液電饋能式減振器研究[D].武漢:武漢理工大學,2011.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
故事作文·高年級(2021年12期)2021-12-21 02:32:35
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電力工程技術(2014年1期)2014-03-20 14:19:06
