汽車C A N總線診斷通信模塊的開發測試
2013-04-13 02:46:08申帥趙恬
科技視界 2013年3期
關鍵詞:定義
申帥趙恬
(重慶郵電大學 自動化學院,中國 重慶 400065)
0 前言
隨著汽車電子技術的飛速發展,越來越多的電子器件應用到車輛內部,極大的提高了車輛的安全性、可靠性和舒適性。同時也帶來了新的問題,車身線束增多、車輛故障診斷困難增加[1]。為了減少車身線束、提高通信速率,車載總線技術應運而生。
CAN總線以其在高實時性、可靠性和抗干擾能力等方面的優勢,成為當前應用最為廣泛的車載總線技術之一。本文遵循國際診斷標準ISO 15765完成診斷通信模塊的開發,實現過程采取分層模塊化設計,提高通信模塊的通用性、重用性。
1 ISO 15765診斷協議體系
ISO 15765是2000年歐洲汽車廠商推出一種基于CAN總線的診斷系統通信標準,目前ISO 15765標準已被多數整車廠商采用,成為汽車行業的通用診斷標準[2]。ISO 15765根據開放系統互連(Open System Interconnection,OSI)7層參考模型,采用分層思想模塊化設計的方式,各模塊負責處理各自功能并提供標準接口[4],各模塊間通過接口調用實現通信,以減低模塊間耦合度,增強協議棧的通用性和可靠性。
ISO 15765-3以ISO 14229為基礎定義診斷協議棧應用層的內容,對應于OSI模型應用層,主要包括應用層診斷服務格式、應用層接口、應用層時間參數等信息。ISO 15765-2定義了診斷協議棧網絡層的內容,對應于OSI模型網絡層和傳輸層,包括了網絡層單幀、多幀傳輸機制,以及多幀傳輸過程中的流控制、時間處理、錯誤處理等內容。
2 通信模塊的開發
網絡層的實現是整個通信模塊的主要內容[3],其核心是多幀傳輸機制中ECU內部的狀態轉換、時間管理以及錯誤處理。
2.1 網絡層多幀傳輸機制
CAN總線數據傳輸以CAN數據幀為基本數據單元,每一個CAN數據幀最多可傳送8個字節的數據,而完成汽車診斷功能需要傳輸的數據往往大于8個字節,因此需要采用多幀傳輸機制。ISO 15765-2定義了4種網絡層協議數據單元N_PDU以完成單幀或多幀的數據傳輸,4種幀類型通過N_PCI(網絡層協議控制信息)區分[4]。其定義格式如表1所示:

表1 CAN總線報文格式定義
不同的幀類型由N_PCI第一個字節的高四位區別,N_PCItype的值0、1、2、3分別代表了單幀、第一幀、連續幀和后續幀。流控幀FS為流狀態參數,BS為連續幀塊大小,STmin為連續幀發送的最小時間間隔。
在多幀傳輸的過程中,網絡層的內部操作為解決對等實體間的數據同步通信問題,采用了數據傳輸流控制方法,通過流控幀實現對通信雙方的管理,是發送端適應接收端網絡層的接受能力。其傳輸過程如圖1所示:

圖1 多幀傳輸過程
2.2 狀態轉換機制
為了實現網絡層多幀傳輸機制的復雜邏輯,在程序編寫過程中設計狀態機,用枚舉類型定義了數據傳輸過程中ECU網絡層在某一時刻的所有可能狀態。
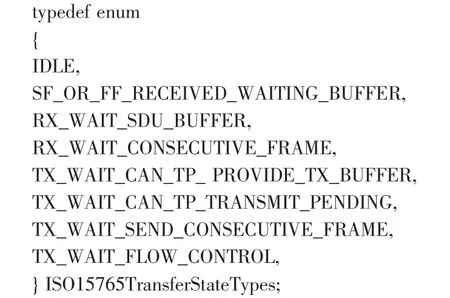
數據傳輸過程中ECU處理不同類型被定義為不同的外部事件,ECU在不同的狀態下將處理不同的CAN幀。ECU網絡層狀態定義是收斂的,因此在某一時刻一定會處于所有狀態中的其中一個,保證能夠對所有類型CAN幀都能夠響應;且ECU網絡層狀態是正交的,不會對同一類型CAN幀重復處理。
此外ECU根據當前網絡層狀態,對所收到的CAN幀處理,不僅取決于接收到的幀類型,還取決于不同幀類型的相對收發順序。當ECU網絡層處于某一狀態收到相應幀類型,且滿足特定的條件時,才能處理相應CAN幀并完成ECU狀態轉換。
2.3 時間管理
網絡層時間管理主要是超時處理和延時發送功能。ISO 15765定義的網絡層時間參數有 N_As,N_Bs,N_Ar,N_Br和 N_Cr。 超時處理通過對時間參數的控制,防止通信雙方中的一方因為潛在錯誤掛起時,另一方持續等待從而失去通信能力。延時發送功能用于多幀傳輸過程中連續多條后續幀的發送,連續兩條后續幀之間的發送間隔必須大于ISO 15765定義的最小時間間隔STmIn。
協議棧時間管理利用ECU的系統時鐘實現,通過配置每1ms產生一次系統中斷,在中斷處理函數中對定義的16位無符號計數器timeoutCounter進行減1操作。在通信過程中每接收或發送一條報文,則會更新計數器為相應時間參數的門限值,在進行下一步操作之前首先判斷計數器是否為0,若為0則說明超時,中斷當前接受或發送進入相應的超時處理。
2.4 錯誤處理
網絡層的錯誤包括了幀格式錯誤、幀參數錯誤。通信雙方必須按照ISO 15765規定的幀格式、幀間邏輯及時間參數收發報文,任何類型的錯誤都將導致當前通信中斷,并進入相應的超時處理。網絡層錯誤類型及處理方式如表2所示:
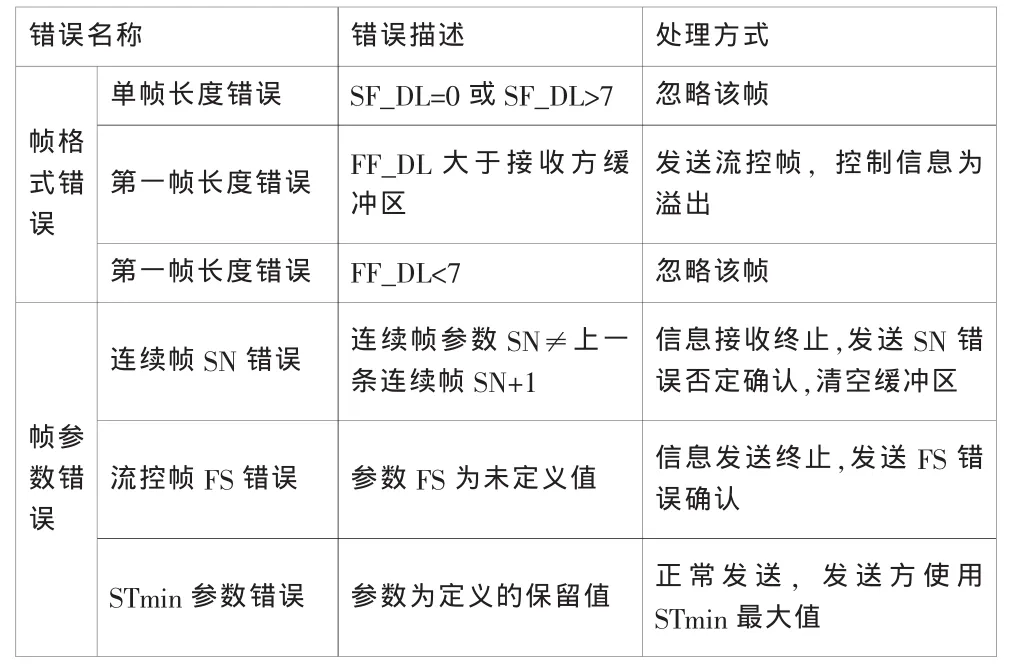
表2 網絡層錯誤處理描述
3 通信模塊的測試
診斷協議棧的測試采用德國Vector Informatik公司總線工具CANoe及其配套專用診斷測試工具CAN dela Studio、CANoe Option DiVa,作為測試儀。協議棧運行在采用NXP LPC 1768為控制器的開發板,作為下位機。測試儀和下位機通過標準的DB9接口連接,CAN總線的通信速率定義為500Kb/s,物理尋址請求報文ID定義為0x766,功能尋址請求報文ID定義為0x760,響應報文ID定義為0x7A6。
根據診斷需求使用CAN dela Studio配置生成診斷數據庫(CDD文件),將診斷數據庫導入CANoe Option DiVa中自動生成測試用例并通過CANoe運行,如圖2所示。

圖2 通信模塊測試結果
4 結論
測試結果表明,本文所述實現的診斷協議棧符合ISO 15765標準,能夠完成汽車故障診斷功能,且具有較強的可靠性和通用性。并且協議棧各模塊參考AUTOSAR架構設計實現,方便協議棧在不同硬件平臺的移植,具有較強的復用性和可移植性。
[1]郭剛,王勵明,盧明.基于 MVCI、ODX的診斷標準研究[J].制造業自動化,2010,(10):15-16.
[2]李銳,王晶瑩,姚燕,等.基于ISO 15765的車載CAN網絡診斷設計[J].計算機工程,2012,(4):35-36.
[3]韓鑫,鮑可進.CAN總線網絡層協議棧開發測試[J].計算機工程,2011(08):232-234.
[4]程安宇,趙國慶,馮輝宗,等.基于CAN總線的電子控制單元功能測試方法[J].計算機應用,2012(1):139-1.
猜你喜歡
幼兒教育·父母孩子版(2022年4期)2022-05-08 21:35:35
中學生數理化(高中版.高考數學)(2021年3期)2021-06-09 06:09:14
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:38
中學生數理化(高中版.高二數學)(2021年2期)2021-03-19 08:54:04
海峽姐妹(2020年9期)2021-01-04 01:35:44
華人時刊(2020年13期)2020-09-25 08:21:32
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
山東青年(2016年1期)2016-02-28 14:25:25
汽車維護與修理(2015年6期)2015-02-28 12:16:55
當代修辭學(2014年3期)2014-01-21 02:30:44