無線遙控車中的手勢識別技術
2013-04-29 00:44:03李穎張曉雪等
科技資訊 2013年8期
李穎 張曉雪等

摘 要:人機交換技術已成為日常生活中一個重要部分。比如,汽車導航技術,醫療器械的設計,游戲娛樂,人臉識別,指紋識別等等技術都體現了人機交換的重要性。又由于手勢是包含信息量最多的人體語言。因此,本文主要研究手勢的識別,尤其是應用在無線遙控車中的手勢識別技術。系統實現的重點和難點在于PC機的手勢識別部分。基于遙控車的設計,本文對手勢識別技術方案設計如下:在手勢建模方面,采用基于表觀的手勢模型;在手勢分析方面,從原始圖像中抽取的輪廓、邊界、圖像矩確定采用的手勢特征;在手勢識別方面,采用模板匹配的方法進行識別。
關鍵詞:手勢建模 手勢特征 模板匹配
中圖分類號:TP39 文獻標識碼:A 文章編號:1672-3791(2013)03(b)-0018-01
1 總體設計
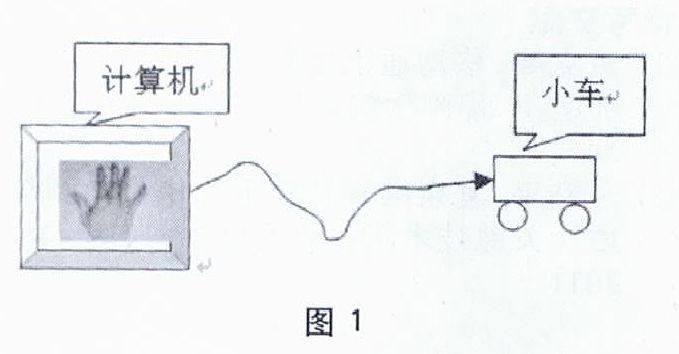
本項目分為PC機端的手勢識別部分和遙控小車部分,系統功能是PC機安裝攝像頭,實時采集手勢圖像,根據手勢識別結果通過無線模塊對小車發送控制命令,使小車完成不同的動作。本系統的總體結構圖(如圖1)。
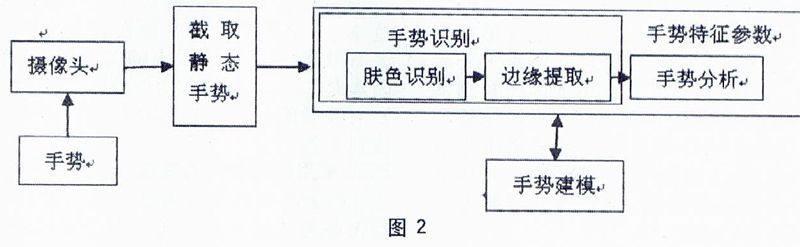
本系統手勢識別部分設計的結構框圖(如圖2)。
2 手勢識別技術
手勢識別的技術方案如以下幾點。
2.1 手勢建模
在手勢識別框架中,手勢模型是一個最基本的部分。手勢建模主要分為基于表現的手勢模型與基于3 d的手勢模型。基于表觀的手勢建模是一種二維建模,從二維平面觀察得到的平面圖像信息描述于的特征。基于表觀的手勢模型主要包括基于顏色的模型與基于輪廓的模型兩種。基于顏色的手勢模型是把手勢圖像看作像素顏色的集合,通過提取手部的顏色的特征來描述手勢。對于一幅彩色圖像而言,顏色更利于將手勢識別出來。因此本文使用的是基于表現的手勢模型,主要是基于膚色的手勢識別。
(1)膚色分割,基于膚色彩色信息的檢測,主要是根據膚色在空間分布的特點,快速地找到手可能的候選區域,縮小后續細檢測的范圍,其檢測過程為。
彩色空間的轉換在計算機視覺中,彩色空間主要有RGB,HSV,HSI,YIQ,YUV等。由于RGB是最為常見的彩色空間,所以可以通過RGB不同的參數值將膚色從圖像中檢測出來。通過對圖像的RGB參數值進行結果分析,R>30,G>15,B>2時手勢可以被模糊的識別出來,但是達不到預期效果,所以本文采用了聚類的方法來較為精準的確定人手的候選區域,方法如下:需要從手勢取出50~80個能代表膚色的像素,統計手勢與該像素顏色相近的像素的數目。同時,改變符合條件的像素的顏色,以確認這些像素是否位于手勢上。得到手勢候選區域后進行邊緣識別,除去自然界中存在著類似膚色的信息。本文采用拉普拉斯算子實現邊緣跟蹤(如圖3)。
(2)手勢分析,手勢不變矩的定義:對于手勢圖像函數f(x,y),如果它分段連續且只在XOY平面上的有限個點不為0,則可以證明它的各階矩存在。手勢圖像的矩是用所有屬于手勢區域內的點計算出來的,因而不太受噪聲的影響。所以可以用不變距的特性區分手勢[5]。
手勢有七個不變矩參數,計算手勢輪廓的不變矩作為手勢的特征,首先根據八鄰域法所得到的輪廓矩,來確定手勢的輪廓函數f(x,y),f(x,y)中x和y分別為矩陣的標號,而函數值就是輪廓距中相應標號存儲的數值[4]。在確定手勢的輪廓函數f(x,y)之后,可計算兩個不變矩作為手勢的特征[1]。這個兩個不變矩特征都是具有旋轉平移和尺度不變性,同時具有很好的區分性能。
2.2 手勢識別
手勢識別有3種方法:模板匹配法、神經網絡法、HMM。模板匹配方法是一種最簡單的識別技術,具有計算簡單、速度快的特點。其核心的思想就是將輸入的原始數據與預先存儲的模板進行匹配,通過測量兩個模板之間的相似度來完成識別任務。所以本文采用模板匹配方法進行手勢識別。
3 結語
目前,基于計算機視覺的靜態手勢識別技術研究很多,有基于幾何特征的手勢識別、基于人工神經網絡的手勢識別等技術,但仍然存在手勢目標檢測困難、手勢目標識別困難等技術難點,所以,如何準確、迅速地對實時手勢圖像進行識別具有重要的研究意義。本文對手勢識別技術進行研究,根據手勢識別結果對遙控車進行控制,其研究成果為手勢識別的發展提供理論依據和實踐基礎,為基于手勢識別技術的人機交互開辟更廣泛的應用領域。
參考文獻
[1]任海兵,祝遠新,徐光祐,等.復雜背景下的手勢分割與識別[J].自動化學報,2002,28(2):256-261.
[2]Stokoe W C.Sign Language Structure:An Outline of the Visual Communication System of the American Deaf, 1960,Buffalo,NY:Linstok.
[3] 朱繼玉,王西穎,王威信,等.基于結構分析的手勢識別[J].計算機學報,2006,29(12):2130-2137.
[4]周航,阮秋琦.基于表現特征的手勢識別[J].廣西師范大學學報,2003,21(1):25-30.
[5]葛元,郭興偉,王林泉.傅立葉描述子在手勢識別中的應用[J].計算機應用與軟件,2005,22(6):12-13.