魚雷自導性能分布式仿真中的作戰環境建模
2013-05-28 08:01:18張勇平張靜遠尹文進
水下無人系統學報 2013年5期
張勇平, 張靜遠, 尹文進
?
魚雷自導性能分布式仿真中的作戰環境建模
張勇平, 張靜遠, 尹文進
(海軍工程大學 兵器工程系, 湖北 武漢, 430033)
為了在魚雷自導性能仿真中體現真實作戰環境對魚雷自導的影響, 從魚雷自導系統與外界的信息交互出發, 通過分析魚雷自導探測目標機理和工作過程, 結合分布式仿真技術, 建立了魚雷自導性能分布式仿真中的復雜海洋環境和對抗作戰仿真模型。仿真結果表明, 所建模型合理有效, 可以體現魚雷自導工作的真實環境。
魚雷; 自導性能; 海洋環境; 作戰環境; 分布式仿真
0 引言
開展魚雷自導性能仿真研究是檢驗和提升魚雷自導性能的重要途徑之一, 魚雷的作戰環境決定了仿真研究必須綜合考慮復雜海洋環境和對抗作戰條件[1]。因此, 有針對性的開展魚雷作戰環境的建模研究對魚雷自導性能仿真的發展有重要意義。現有海洋環境聲學模型理論性較強, 仿真計算比較困難, 必須結合魚雷聲自導探測目標的機理對其進行改造或者重新建模。對抗作戰條件是魚雷作戰環境的重要部分, 仿真模型必須結合魚雷自導搜索、水聲反對抗的機理展開研究。
目前, 國內相關領域的科研人員對魚雷作戰使用、效能分析和自導系統數字仿真技術的研究較多[2-5], 但針對魚雷自導性能研究的海洋和對抗作戰環境的仿真建模研究較少。本文從分析魚雷自導探測目標的機理出發, 對魚雷自導系統與環境的信息交互進行了深入的分析, 結合分布式仿真技術, 提出了復雜海洋環境和對抗作戰條件的仿真模型。并在魚雷自導性能分布式仿真系統中對所建仿真模型進行了仿真驗證。
1 自導性能仿真影響因素
無線電波、激光等物理場在海水中的衰減很快, 無法滿足水下遠距離探測的需求。聲傳播在海水中的衰減較慢, 而且傳播速度在1 500 m/s左右, 是目前水下通信和探測目標唯一有效的物理場。魚雷被動探測目標是采用接收目標的輻射噪聲信號進行的, 以被動聲納方程為判斷依據, 見式(1)。主動探測目標是采用接收自導聲納發射的脈沖信號經過目標反射的回波信號來進行檢測的, 以主動聲納方程作為判斷依據, 見式(2)。


式(1)中:為目標的輻射噪聲;為傳播損失;為水聽器處的噪聲級;為聲納的指向性;為檢測閾。式(2)中:為聲納發射聲源級;為混響級; 其他與式(1)相同。
復雜海洋信道使被動探測的目標輻射信號、主動探測的聲納發射信號與目標回波信號發生衰減和畸變, 海洋中氣泡和浮游生物等對主動自導造成體積混響, 海雜波和海底介質分別造成海面混響和海底混響。因此魚雷自導接收機必須要有相應的抗信號畸變、抗混響和提取目標特征等信號處理方法。在進行魚雷自導性能分布式仿真時, 海洋環境模型必須體現信號衰減和混響等因素。
魚雷作戰過程中, 氣幕彈對被動自導的目標輻射信號、主動自導脈沖信號和目標回波信號造成插入損失; 噪聲干擾器提高了背景噪聲, 抑制了自導接收機對信號的接收; 誘餌采用模擬目標的運動和聲學特征來欺騙魚雷跟蹤。水聲對抗器材的不同戰術用法會對魚雷自導造成不同的影響, 因此, 為了識別和對抗敵方釋放的氣幕彈、噪聲干擾器和誘餌, 魚雷自導系統必須要有一定的目標識別和水聲反對抗能力。在進行魚雷自導性能分布式仿真時, 除了目標機動外, 對抗作戰模型還必須體現水聲對抗器材作戰使用對自導工作過程的影響。
2 自導系統與外界的信息交互
自導系統在海水電池激活后開始工作, 魚雷的射擊參數在發射前由發射平臺的指控系統裝定到魚雷上。在進行魚雷自導性能分布式仿真時, 魚雷成員激活后首先必須接收發射平臺的射擊參數信息。被動自導開機后, 載有目標方位、特征等信息的輻射噪聲信息經過海洋信道被魚雷自導系統接收。主動開機后, 魚雷自導聲納信號經過海洋信道照射到目標后, 載有目標方位、特征等信息的反射信號被自導接收機接收。
2.1 自導系統與海洋環境的信息交互
海洋環境是魚雷探測目標的水聲信道, 主要對目標輻射噪聲信號、主動聲納信號和目標回波信號造成衰減、畸變等影響。復雜海洋環境對信號的影響主要體現在傳播損失、多途效應、海面混響、海底混響和體積混響等幾個方面。在進行魚雷自導性能分布式仿真時, 自導探測的計算模型必須考慮上述因素, 模型中有關涉及到海洋環境的參數可以由數據庫讀取或導演成員統一發布, 魚雷成員接收的環境參數作為上述聲學模型計算的依據。涉及到模型計算的海洋環境參數主要有海面風速, 海面風向, 海水鹽度、深度、溫度、溫度梯度, 海底類型等。
2.2 自導系統與目標的信息交互
魚雷自導系統被動檢測時, 檢測到的目標輻射噪聲信息載有目標的方位、深度、輻射水平、線譜成分和其他特征信息。提取這些信息可以進行方位估計、目標識別等操作。
主動檢測時, 魚雷自導系統發射一定時寬和帶寬的脈沖信號。該信號經過海洋信道到達目標, 經過目標反射后, 載有目標方位、距離、速度和其他特征信息的回波信號經由海洋信道被自導系統接收[1]。
綜上所述, 在進行魚雷自導性能分布式仿真時, 魚雷成員必須把發射脈沖信息、魚雷位置和速度信息公布給其他目標及對抗器材成員, 目標及對抗器材成員必須把位置和方位信息、速度信息、輻射噪聲水平、目標強度和其他一些特征信息公布給魚雷。魚雷成員與外界的信息交互關系見圖1。

圖1 魚雷與外界信息交互圖
3 仿真模型
3.1 復雜海洋環境模型
對魚雷自導性能受海洋環境的影響進行精確建模分析是非常困難的, 基于本文研究的目的, 以對自導性能產生主要影響為考慮原則, 這里對其作簡化處理, 主要考慮聲速、聲吸收、海底混響、海面混響、體積混響等幾個方面[4]。其中, 聲速的計算采用如下計算模型[6]

式中:為聲速;為溫度;為鹽度(以每千克海水中含各種鹽類克數計);為深度。
該模型中涉及到3個環境變量, 溫度、鹽度和深度。表示海水對聲波吸收程度的對數吸聲系數按如下模型計算[7]
式中:為溫度;為鹽度(以每千克海水中含各種鹽類克數計);為工作頻率;f為豫弛頻率, 有

為與海水溫度有關的系數, 有

傳播損失采用下式計算模型[8]

體積混響采用如下計算模型[4]

海面和海底混響由于散射體的分布是2D平面的, 統稱為界面混響。界面混響級采用如下計算模型



根據上述聲速、聲吸收、海底混響、海面混響和體積混響計算模型的參量分析, 只要給出溫度、鹽度、風速、海底類型這幾個環境變量就可以體現復雜海洋環境對魚雷自導的影響。
3.2 對抗作戰模型
模擬實際對抗作戰環境需要考慮魚雷的作戰使用、目標的機動規避和敵方水聲對抗3個方面。魚雷的作戰使用需要考慮魚雷射擊提前角的計算、自導開機距離的設定、齊射時展開航程的設定、發射方式的選擇等。其中, 射擊提前角和展開航程的計算模型[2]見式(12)和式(13)。自導開機距離和發射方式一般由人工設定。
形心法計算發射提前角模型
展開航程計算模型
以典型的魚雷對潛攻擊為例, 潛艇被動聲納不能測距, 只能聽測其相對于本艇的方位。其機動規避戰術主要有變速、變深、旋回和停車等。為充分體現潛艇旋回角度的隨機性, 結合潛艇作戰使用行動規則, 仿真設計了3種不同的機動方式。
機動方式1: 潛艇背雷轉90°, 機動后航向為以旋回90°后的方向為中心, 均方差為10°的正態分布。

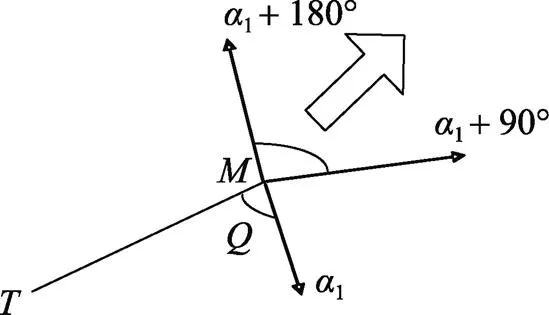
圖2 潛艇機動規避模式一

圖3 潛艇機動規避模式二
機動方式3: 潛艇將魚雷甩到尾部, 機動后航向為以魚雷-潛艇視線方向為中心, 均方差為10°的正態分布。
敵方的水聲對抗是和機動規避結合在一起的, 以典型的潛艇反魚雷水聲對抗為例進行討論。潛艇使用水聲對抗器材對抗來襲魚雷的作戰使用原則是隱蔽自己、欺騙和干擾魚雷自導探測、增加魚雷航程消耗[9]。其作戰使用方式較多, 考慮到魚雷自導性能仿真的需求, 現建立誘餌、噪聲干擾器和誘餌組合使用以及噪聲干擾器和氣幕彈組合使用3種水聲對抗模型, 以體現敵方水聲對抗對魚雷自導性能的影響。
3.2.1 誘餌對抗模型


圖4 誘餌作戰使用示意圖

3.2.2 誘餌和噪聲干擾器組合使用對抗模型

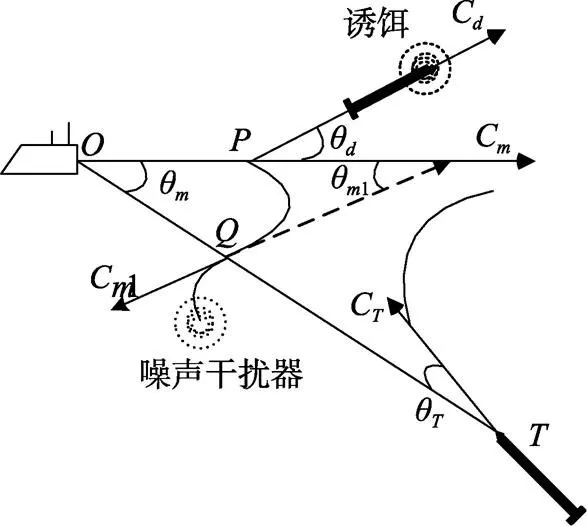
圖5 誘餌/噪聲干擾器組合使用示意圖
3.2.3 噪聲干擾器和氣幕彈組合使用對抗模型

圖6 氣幕彈/噪聲干擾器組合使用示意圖
4 仿真實例
在基于上述海洋環境模型和對抗作戰模型的魚雷自導性能分布式仿真系統中, 以水面艦艇齊射魚雷攻擊單艘潛艇, 潛艇采用發射噪聲干擾器和誘餌的自動對抗方案進行反魚雷對抗為例進行了仿真驗證。仿真中魚雷在齊射展開后經過一段時間發現目標, 潛艇探測到來襲魚雷后發射噪聲干擾器和誘餌進行反魚雷對抗, 同時, 自身開始機動規避, 對抗態勢見圖7。當魚雷被誘餌誘騙后, 1號魚雷穿過誘餌后發現潛艇目標, 繼而跟蹤并命中目標, 2號魚雷穿過誘餌后未發現目標開始環形搜索, 對抗態勢見圖8。

圖7 對抗態勢圖一

圖8 對抗態勢圖二
5 結束語
本文從魚雷自導探測目標的原理出發, 對自導系統與外界的信息交互進行了深入的研究; 結合自導探測目標機理、海洋環境模型、魚雷自導性能仿真需求和特點、分布式仿真技術等, 提出了魚雷自導性能分布式仿真的復雜海洋環境和對抗作戰仿真模型; 并在魚雷自導性能分布式仿真系統中對所建仿真模型進行了仿真驗證, 仿真結果驗證了模型的有效性和正確性。該仿真模型全面考慮了水聲環境計算模型、目標機動和水聲對抗等影響魚雷自導性能的綜合因素, 這對研究魚雷自導性能、建設粒度更細更復雜的魚雷作戰效能評估系統具有較大的參考價值。另外, 這對研究智能水雷、反魚雷魚雷等水下武器的作戰性能仿真具有一定的借鑒意義。
[1] 聶衛東, 康鳳舉, 蘇穎, 等. 魚雷聲自導檢測目標過程的建模與實時仿真[J]. 計算機仿真, 2005, 22(6): 57-60.Nie Wei-dong, Kang Feng-ju, Su Ying, et al. Modeling and Real-time Simulation of Torpedo Acoustic Homing Process[J]. Computer Simulation, 2005, 22(6): 57-60.
[2] 卜廣志, 張宇文. 魚雷武器系統作戰效能的仿真方法研究[J]. 魚雷技術, 2002, 10(2): 32-35. Bu Guang-zhi, Zhang Yu-wen. A Study of Simulation Method of Operational Effectiveness for Torpedo Weapon System[J]. Torpedo Technology, 2002, 10(2): 32-35.
[3] 張培培, 楊大偉. 魚雷武器系統作戰效能方法研究[J]. 艦船科學技術, 2010, 32(6): 76-78. Zhang Pei-pei, Yang Da-wei. Research on Operational Effectiveness System of Torpedo Weapon System[J]. Ship Science and Technology, 2010, 32(6): 76-78.
[4] 張靜遠. 魚雷作戰使用與作戰能力分析[M]. 北京: 國防工業出版社, 2005, 5-47.
[5] Dagenais V, Mcgaughey D R, Pecknold S. Improved Torpedo Range Estimation Using Modified Fast Orthogonal Search Techniques[C]//Oceans 2008. Quebec City: IEEE, 2008: 1-7.
[6] Medwin H. Speed of Sound in Water for Realistic Para- meters[J]. The Journal of the Acoustical Society of Ame- rica, 1975, 58(6): 1318-1319.
[7] Urick R J. 水聲原理[M]. 哈爾濱: 哈爾濱船舶工程學院出版社, 1990.
[8] 周德善, 李志舜, 朱邦元. 魚雷自導技術[M]. 北京: 國防工業出版社, 2009.
[9] 陳春玉, 張靜遠, 王明洲, 等. 反魚雷技術[M]. 北京: 國防工業出版社, 2006.
Operational Environment Modeling in Distributed Simulation of Torpedo Homing Performance
ZHANG Yong-ping, ZHANG Jing-yuan, YIN Wen-jin
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
To reflect real operational environment in distributed simulation of torpedo homing performance, starting from the information interaction analysis of torpedo homing system and outside environment, the mechanism and guiding process of detecting targets are analyzed. And the models of complex marine environment and countermeasure are established for distributed simulation of torpedo homing performance with the distributed simulation technology. Simulation results show that these models are reasonable and effective for reflecting the real environment where a torpedo homing system works.
torpedo; homing performance; marine environment; operational environment; distributed simulation
TJ630.34; TP391.9
A
1673-1948(2013)05-0392-06
2013-04-27;
2013-06-16.
張勇平(1979-), 男, 工程師, 在讀博士, 主要研究方向為魚雷自導技術、水聲信號處理、系統仿真.
(責任編輯: 許 妍)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03