基于正弦規原理的工作臺自動翻轉機構設計
2013-06-29 02:26:34段明亮
鍛壓裝備與制造技術 2013年2期
段明亮
(齊齊哈爾二機床集團有限責任公司,黑龍江 齊齊哈爾 161005)
現有技術的翻轉機構一般是采用蝸輪蝸桿或齒輪傳動來驅動工作臺翻轉的。這種結構對制造精度要求高,加工難度大。雖然實現了基本的翻轉角度功能,但由于蝸輪蝸桿或齒輪傳動間的誤差不可避免,所以翻轉的角度就會存在誤差,僅能滿足翻轉體的翻轉角度公差±1′,不能滿足對產品質量的更高要求。
如圖1 所示,新型回轉工作臺是在翻轉工作臺上設有一正弦機構,該正弦機構由在工作臺座上固定的正弦圓柱和安裝在滑座上的塊規組成,塊規一面與滑座定位面貼合,另一面與正弦圓柱相切,塊規的厚度是利用正弦原理計算出來的,利用塊規下面的調整墊調整,消除工件的加工誤差,可保證翻轉工作臺獲得準確的翻轉角度,角度公差在±3.6″范圍內。
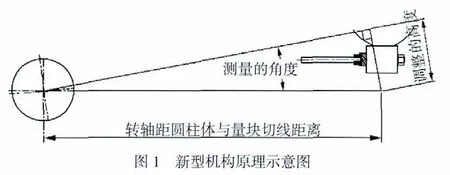
利用鉸軸式安裝的液壓油缸,依靠液壓驅動,頂起工作臺,同時裝置中設有自動推進的塊規,利用正弦規原理,準確測出所需要的傾斜角度,此角度是通過機械調整而得的最終角度值,克服了其中所有工件的制作誤差,傾斜角度準確可靠,同時通過更換調整墊準確地測出調整范圍內的其他角度值,結構簡單可靠。
具體翻轉過程如下:頂起油缸給油;工作臺被頂起翻轉到范圍允許的角度;水平油缸推動塊規到位;頂起油缸泄油,工作臺回落,通過調整塊規下面的調整墊而得需要的準確角度。工作臺翻轉驅動如圖2所示。
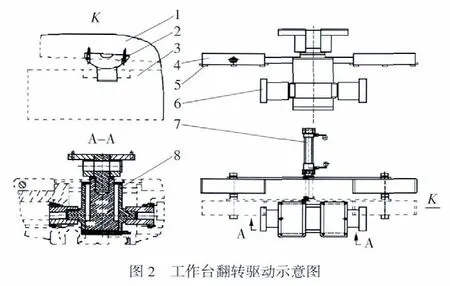
1.臺座 2.正弦圓柱體 3.滑座 4.塊規 5.調整墊6.支撐軸 7.水平油缸 8.工作臺翻轉頂起油缸
新型翻轉機構提高了翻轉工作臺翻轉角度的精度,提高了工作臺的承載能力。無需電機驅動,節省了能源。
[1]劉鴻文,主編.材料力學(第三版)[M].北京:高等教育出版社,1992.
[2]張美麟,主編.機械創新設計[M].北京:化學工業出版社,2005.
[3]孟憲源,編著.機構構型與應用[M].北京:機械工業出版社,2003.[4]孟憲源,主編.現代機構手冊[M].北京:機械工業出版社,1994.
[5]姜 琪,主編.機械運動方案及機構設計[M].北京:高等教育出版社,1991.
[6]郭芝俊,左寶山,張林芳,主編.機械設計便覽[M].天津:天津科學技術出版社,1988.
[7]劉建武.可翻轉的回轉工作臺裝置.鍛壓裝備與制造技術,2011,46(3).
