七自由度自動鋪絲機器人的自運動流形分析
2013-07-25 03:37:30葛新鋒
中國機械工程 2013年12期
葛新鋒
許昌學院,許昌,461000
0 引言
在飛機S形進氣道的制造過程中,采用了先進的纖維絲束自動鋪放技術。纖維絲束自動鋪放主要由機器人的末端執行器在芯模上根據預先規劃的軌跡來完成[1]。要在芯模上進行鋪放纖維絲束,機器人所需要的自由度數至少為6,但是一般六自由度的機器人不能以任意姿態來跟蹤芯模的位置[2]。因此,一些學者就采用了增加自由度的方式來改善機器人跟蹤目標的靈活性,這種額外增加的自由度稱為冗余自由度,具有冗余自由度的機器人稱為冗余自由度機器人[3-4]。冗余自由度機器人比六自由度機器人具有更高的靈活性、更精確的跟蹤目標能力、更好的避障能力和避奇異能力[5-7]。因此,對自由度大于6的冗余自由度機器人的研究更有實際意義。
在自動鋪絲束成形技術的復合材料制造過程中,鋪絲過程采用七自由度的冗余度機器人來完成,也就是說,七自由度的冗余度機器人系統是整個自動鋪絲束成形系統中的重要組成部分,具體的鋪絲工藝都由它來實現,因此對冗余度自動鋪絲機器人進行深入研究意義十分重大。對機器人來講,運動學逆解是實現運動規劃和運動控制的基礎,對于冗余自由度機器人也是一樣,所以要實現對冗余自由度自動鋪絲機器人的運動規劃和運動控制,首先需要解決的是運動學逆解的問題。冗余自由度機器人的自運動流形包含了機器人的全部逆解[8],給出了逆解和末端執行器之間的映射關系,從本質上反映了冗余度機器人的自運動能力。
對于冗余機器人基于自運動流形的運動學逆解的求解,國內外的學者們提出了諸多算法,Moll等[9]通過在冗余度機器人的自運動流形上尋找最小能量曲線的方法,來實現機器人的最優軌跡規劃;Muller[10]利用人工勢場法在冗余度機器人自運動流形的切空間研究機器人的避障問題,并給出了5R串聯機器人的自運動流形;Joel[11]給出了平面3R機構和空間4R機構的自運動流形,并得出Jacobian矩陣的零空間即是自運動流形的切空間的結論;趙建文等[12]采用自運動流形的方法從理論上分析了特殊結構的冗余度機器人的逆解,但對于其他結構類型的冗余度機器人也沒有給出有效的運動學逆解算法。上述算法普遍存在運算量大、實時性較差、優化結果不一定最優、不能充分利用冗余的自由度、算法不穩定等缺點。
要得到冗余自由度機器人的自運動流形,首先要求出冗余自由度機器人的位置逆解。但是對于六自由度以上的冗余度機器人來說,其位置逆解很難得到[13]。冗余度自動鋪絲機器人的全部逆解基于自運動流形得到,對分析其他類型的冗余度機器人逆運動學解有一定的借鑒意義。
1 鋪絲機器人的拓撲結構分析
鋪絲機器人由1個六自由度串聯機械手和1個旋轉芯模組成,如圖1所示。根據等效運動的原理,把芯模坐標系和基座坐標系固連在一起,從而得到肩部1個轉動關節、肘部3個移動關節和腕部3個關節的七自由度串聯機器人,其拓撲結構如圖2所示。按照標準D-H方法建立坐標系,D-H參數如表1所示。
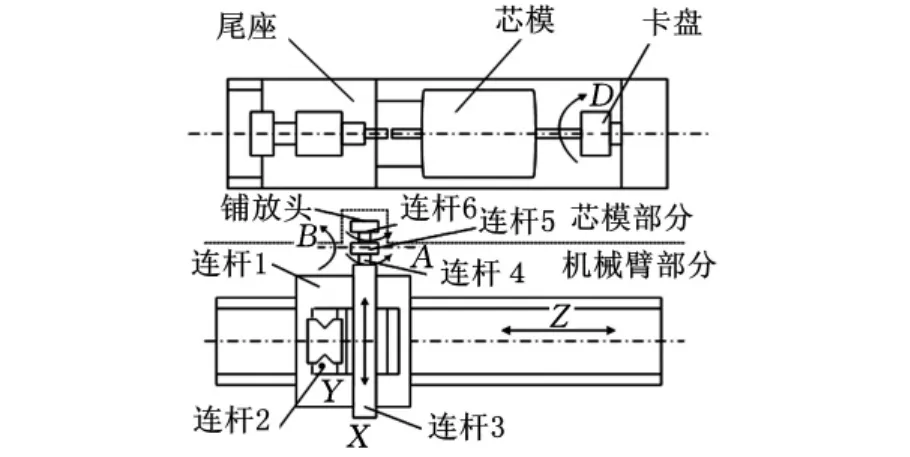
圖1 自動鋪絲機器人的結構圖
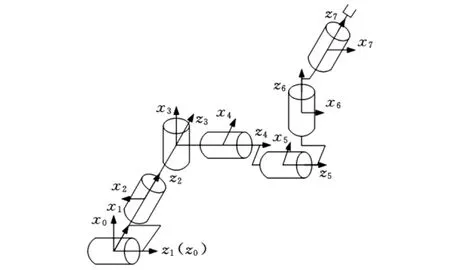
圖2 七自由度自動鋪絲機器人拓撲結構
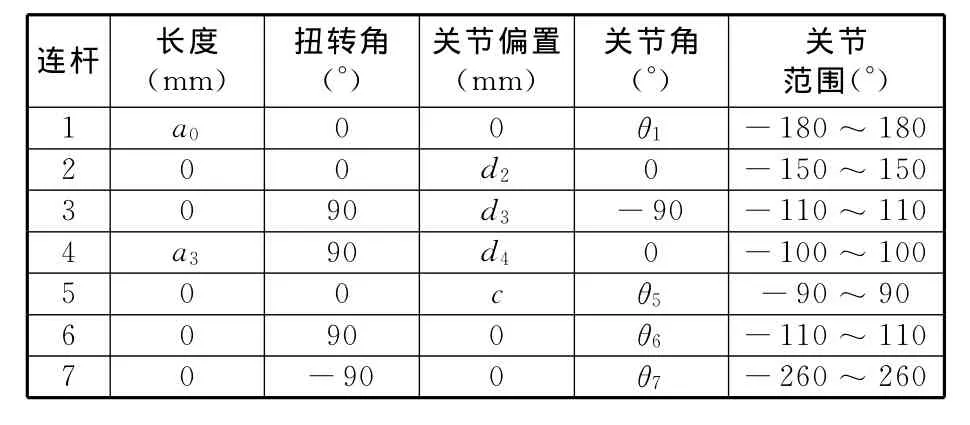
表1 鋪絲機器人的連桿參數
2 七自由度機器人自運動流形
2.1 七自由度機器人位置關節空間流形
由于末端執行器與第7關節固連,通過第7關節坐標系的位置可以很容易知道末端執行器的位置。因此,末端執行器上固連運動坐標系的定義不會影響機器人的運動分析,故假定末端執行器的坐標系與第7關節坐標系重合。自動鋪絲機器人的3個移動關節交于一點,決定了末端執行器的空間位置,這樣末端執行器的位置就可以由第5、第6、第7關節軸線的交點到基坐標系原點之間的位移矢量l o1o4來確定,全體這樣的l o1o4的集合就構成了該冗余度機器人的位置工作空間,所以3個移動關節又稱為位置關節。
根據自動鋪絲機器人的等效運動,可以定義腰肩肘關節構型空間為

式中,C i為第i關節的構型空間,i=1,2,3,4。
機器人的位置工作空間U p可以表示為

式中,f p(θp)為CWSC到U p的映射。

式中,C p為自動鋪絲機器人的位置關節空間流形。
2.2 七自由度機器人姿態關節空間流形
腕部3個轉動關節的軸線交于一點o4,末端執行器的姿態調整僅由第5、第6、第7關節的轉動就可以實現,且姿態調整時不改變o4的位置,故腕部的3個轉動關節又稱為姿態關節,因此,該冗余度機器人的末端執行器是位姿解耦的。
定義腕關節構型空間:


式中,C o為機器人的姿態關節空間流形;f為冗余度機器人的正向運動學解。
2.3 七自由度機器人自運動流形
將第i關節的關節空間表示為C i,則關節構型空間C可以表示為7個獨立的C i的積空間:

機器人關節所起的作用相當于數學里函數所起的作用,它實現了關節構型空間和末端執行器的位姿工作空間的映射與逆映射。令θ=[θ1θ2…θ7]T,則冗余度機器人末端執行器的位姿工作空間可描述為

任取u∈U,則u對應的自運動流形可描述為由構型子空間C So和映射集F So組成的對子:

對于串聯機器人而言,f很容易由θ求出,因此,求解機器人自運動流形的主要任務是求解C So。
3 自動鋪絲機器人的自運動流形
自動鋪絲機器人腕部的3個轉動關節軸線交于一點,決定了機器人末端執行器在工作空間的姿態;3個移動關節交于一點,決定了機器人末端執行器在工作空間的位置。末端執行器的姿態調整可以僅由腕部的3個關節轉動來實現,姿態調整時不改變末端執行器的位置。所以可以把該機器人的自運動流形分解為位置工作空間流形和姿態工作空間流形,并分別求取該位置的工作空間流形和姿態工作空間流形,然后經過配對得到該自動鋪絲機器人關節空間的自運動流形。
3.1 自動鋪絲機器人的位置關節空間流形
令末端執行器坐標系T相對芯模坐標系S的位姿變換矩陣為,則有
據前述可得位置關節參數:
根據等效運動原理,假設自動鋪絲機器人末端執行器跟蹤一個空間圓時,則應有圖3所示的自動鋪絲機器人位置關節空間流形,但在實際鋪絲過程中,由于機器人末端執行器在工作過程中實際運動路線為一條空間曲線,加上待鋪零件的尺寸限制,故位置關節空間流形僅為圖3的一部分。
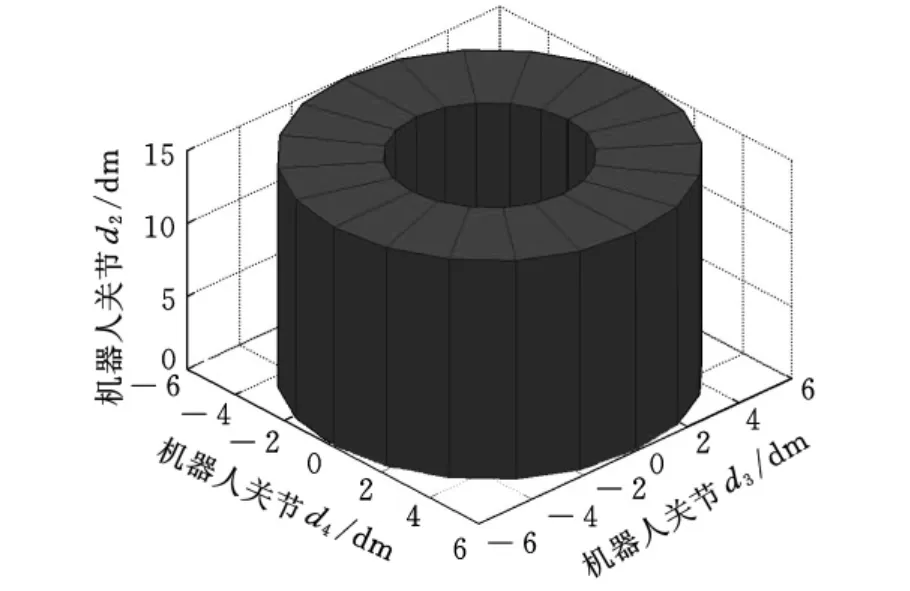
圖3 位置關節空間流形
3.2 自動鋪絲機器人的姿態關節空間流形
自動鋪絲機器人末端的3個轉動關節軸線交于一點,其幾何結構如圖4所示。末端執行器在坐標系x0y0z0中的期望坐標為(xee,yee,zee),3個轉動關節軸線的交點到末端執行器的距離為l,ψ為末端執行器與其在x0y0面內的投影所在的平面和通過關節軸1的鉛垂面的夾角。
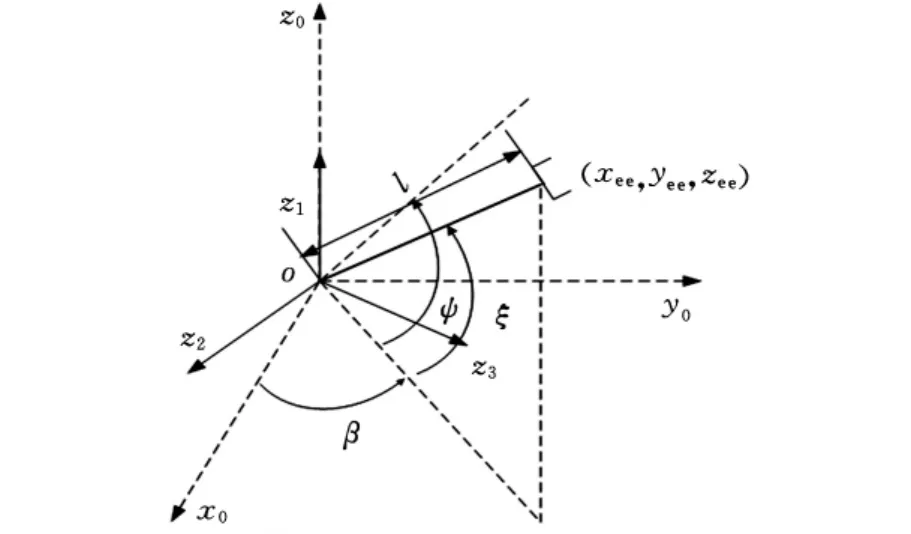
圖4 自動鋪絲機器人姿態關節的幾何結構
根據自動鋪絲機器人姿態關節的幾何結構,有下列等式成立:

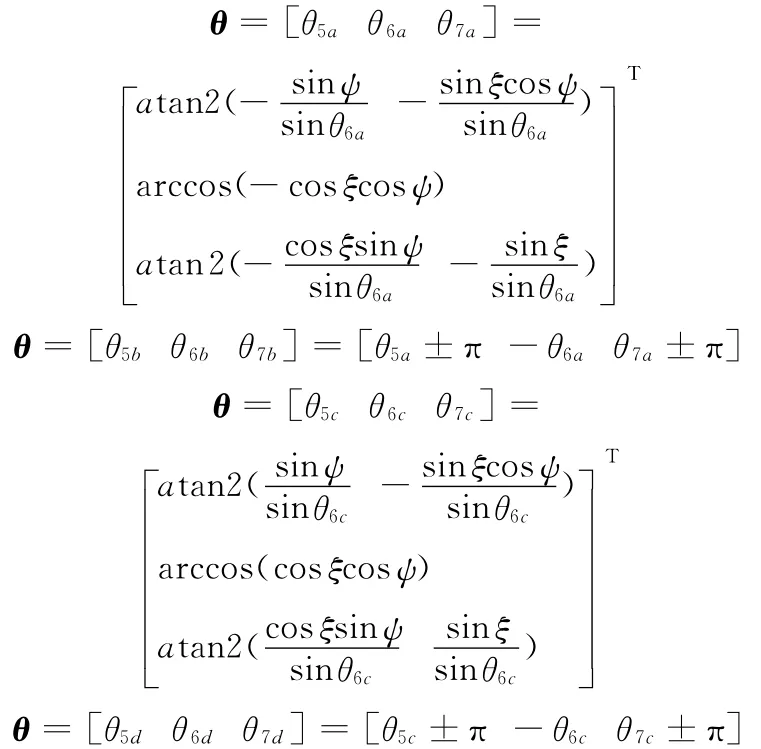
在給定末端執行器的位置坐標(xee,yee,zee)和自運動參數ψ的情況下,根據式(11)、式(12)、式(13)可得其運動學逆解:
其對應的姿態關節空間流形如圖5所示(部分)。
3.3 自動鋪絲機器人的自運動流形

圖5 姿態關節空間流形
冗余自由度機器人的自運動流形是構型空間流形的子流形[14],所以自動鋪絲機器人的自運動流形由位置關節空間流形和姿態關節空間流形配對組合而成。機器人姿態關節空間流形為與機器人末端執行器位置和自運動參數有關的空間曲線,而機器人位置關節空間流形為-空心圓柱,故自動鋪絲機器人的自運動流形為空心圓柱中空間曲線,所以七自由度冗余機器人能夠以任意姿態完成鋪絲任務。
4 自動鋪絲機器人的自運動流形驗證
為了驗證求出的自運動流形的正確性,以鋪絲機器人纏繞某型號飛機的S形進氣道芯模為例進行驗證,圖6所示為某型號飛機的S形進氣道機器人行走的軌跡曲線,也即圖6為機器人末端執行器在芯模上的期望軌跡。圖7所示是根據圖6機器人期望軌跡的運動學逆解得到的末端操作器的仿真軌跡。
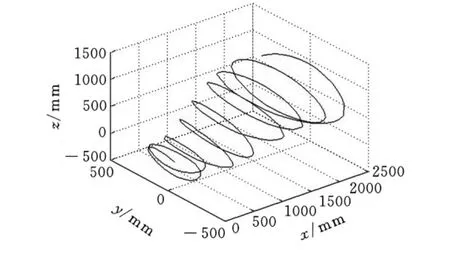
圖6 末端執行器的期望軌跡
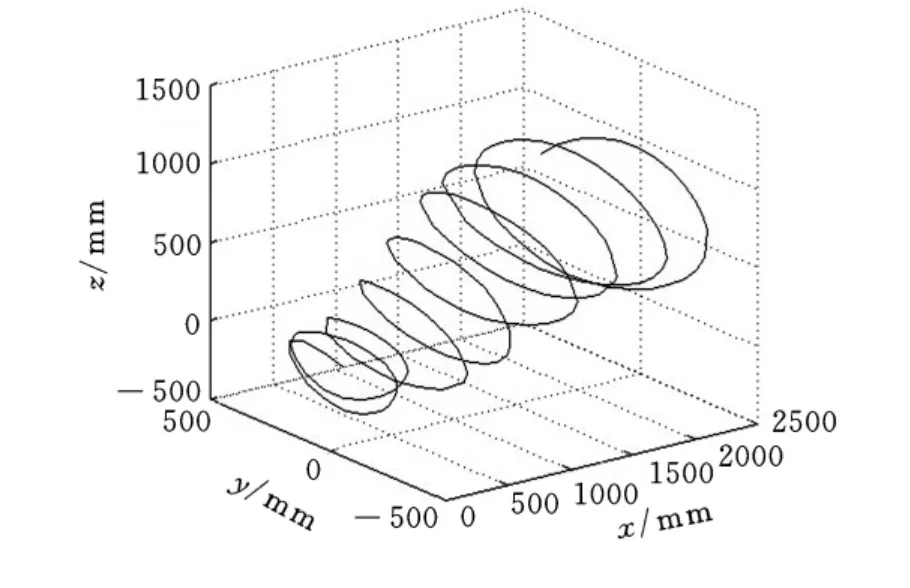
圖7 末端執行器的仿真軌跡
對比圖6和圖7,發現所得到的仿真軌跡和期望軌跡相當一致,證明本文求得的自動鋪絲機器人的自運動流形正確、適用。
5 結語
七自由度的自動鋪絲機器人屬于位姿解耦的冗余度機器人,其自運動流形可以看作是位置工作空間流形和姿態工作空間流形配對形成的自運動流形;求解位姿解耦的冗余度機器人的自運動流形時,先把自運動流形分解為位置工作空間流形和姿態工作空間流形,然后分別進行分析和求解,最后把求解出來的位置工作空間流形和姿態工作空間流形進行配對即可得到該冗余度機器人的自運動流形。
[1]劉亞威.F35戰斗機進氣道的自動化制造[J].國防制造技術,2011(4):32-34.
Liu Yawei.The Automated Manufacturing of the F35 Fighter Inlet[J].Defense Manufacturing Technology,2011,4:32-34.
[2]韓振宇,邵忠喜,富宏亞,等.S形進氣道纖維鋪放軌跡網格化生成[J].航空制造技術,2009(19):72-78.
Han Zhenyu,Shao Zhongxi,Fu Hongya,et al.Meshing Method of Fiber Placement Track for SShaped Inlet[J].Aeronautical Manufacturing Technology,2009(19):72-78.
[3]王連圭,馬保離.冗余機器人系統的自運動控制[J].控制與決策,2003,18(2):199-202.
Wang Liangui,Ma Baoli.Self-motion Control of Redundant Manipulators[J].Control and Decision,2003,18(2):199-202.
[4]張秋豪,孫漢旭,魏世民.改善冗余度機器人靈活性的研究[J].北京郵電大學學報,2004,31(7):748-752.
Zhang Qiuhao,Sun Hanxu,Wei Shimin.A New Method for Improving Flexibility of Redundant Robot[J].Journal of Beijing University of Posts and Telecommunications,2004,31(7):748-752.
[5]陸震.冗余自由度機器人原理及應用[M].北京:機械工業出版社,2007.
[6]唐粲,贠超,欒勝.一種新型醫療機器人運動學及靈活性分析[J].北京航空航天大學學報,2004,27(4):74-77.
Tang Can,Yun Chao,Luan Sheng.Analysis of Kinematics and Dexterity for New Surgery Robot[J].Journal of Beijing University of Aeronautics and Astronautics,2004,27(4):74-77.
[7]賈慶軒,褚明,孫漢旭,等.9-DOF超冗余機器人軌跡規劃優化算法[J].北京郵電大學學報,2008,31(2):20-25.
Jia Qingxuan,Chu Ming,Sun Hanxu,et al.Research on the Optimal Algorithm for Trajectory Planning of a 9-DOF Hyper-redundant Robot[J].Journal of Beijing University of Posts and Telecommunications,2008,31(2):20-25.
[8]Burdick J W.On the Inverse Kinematics of Redundant Manipulators:Characterization of the Self-Motion Manifolds[C]//IEEE International Conference on Robotics and Automation.New York:IEEE,Council on Robotics and Automation,1989:264-270.
[9]Moll M,Kavraki L E.Path Planning for Minimal Energy Curves of Constant Length[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation.New Orleans:Institute of Electrical and Electronics Engineers,2004:2826-2831.
[10]Muller A.Collision Avoiding Continuation Method for Inverse Kinematics of Redundant Manipulator[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation.New Orleans:Institute of Electrical and Electronics Engineers,2004:1593-1598.
[11]Joel W B.On the Inverse Kinematics of Redundant Manipulator:Characterization of the Self-motion Manifold[C]//Proceedings of the 1989 IEEE International Conference on Robotics and Automation.New York:IEEE,1989:264-270.
[12]趙建文,姚玉峰,黃博.一種位姿耦合式冗余度機器人的自運動流形[J].機械科學與技術,2009,28(8):1012-1017.
Zhao Jianwen,Yao Yufeng,Huang Bo.Self-motion Manifold of a Redundant Robot with Coupled Pose[J].Mechanical Science and Technology,2009,28(8):1012-1017.
[13]Moll M,Kavraki L E.Path Planning for Minimal Energy Curves of Constant Length[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation.New Orleans:Institute of Electrical and Electronics Engineers,2004:2826-2831.
[14]Burdick J W.Kinematics Analysis and Design of Redundant Robot Manipulators[D].California:Stanford University,1980.