前軸載荷對電動客車EHPS系統的助力與節能性的影響
2013-08-01 11:22:44劉文光張中帆
重慶理工大學學報(自然科學) 2013年10期
陳 峰,何 仁,劉文光,張中帆
(1.江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013;2.江蘇常隆客車有限公司,江蘇無錫 214432)
近年來,得益于電控與電池技術的發展,純電動客車作為新能源汽車的一種得到廣泛研究[1-2],同時液壓助力轉向系統也被電動液壓助力轉向系統(electro hydraulic power steering,EHPS)所代替[3-6]。如今,國外通過在商用汽車上安裝EHPS系統來調節轉向電機的轉速以改善助力特性,從而提高了燃油經濟性和整車穩定性[7]。國內部分純電動客車也安裝了電動液壓助力轉向系統,在一定程度上改善了客車轉向輕便性。但大部分客車采用的都是轉向電機轉速固定的液壓助力轉向系統,這使得客車在低速時轉向吃力,也因為電機保持恒速而導致能量消耗增大。因此,有必要研發適用于純電動客車的、節能效果更好的EHPS系統。本文通過建立純電動公交客車EHPS系統的數學模型和基于AMESIM的仿真模型,研究了前軸載荷變化對轉向性能的影響,設計了控制策略[8],滿足了車輛對低速輕便性和高速良好路感的要求,為在純電動客車上安裝性能更優的EHPS系統提供了理論依據。
1 純電動公交客車EHPS系統的組成和工作原理
本文研究基于復合電源的純電動公交客車,其EHPS系統結構如圖1所示。系統結構主要包括轉向盤、復合電源、變頻器、電動機、液壓泵、油罐、循環球轉向器、搖臂、直拉桿和車輪。
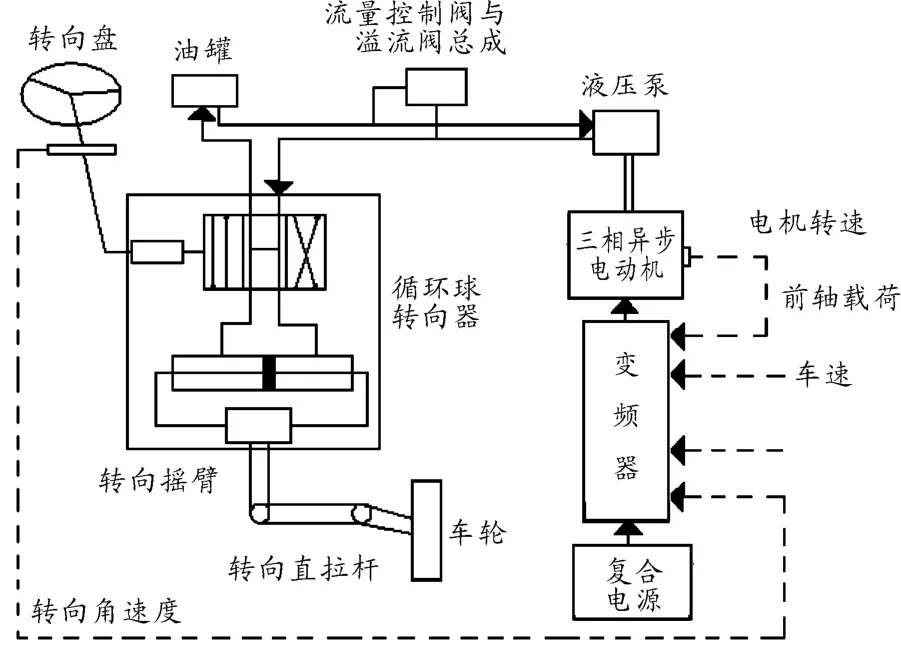
圖1 純電動公交客車EHPS系統結構
純電動客車轉向時,分頻器根據電機轉速、前軸載荷、車速和轉向盤角速度傳感器輸入的信號計算出電機所需轉速,將輸入的復合電源調頻、調壓,并將已調頻、調壓的交流電源輸入電機中控制電機旋轉,進而控制液壓泵輸出流量和助力的大小。該系統滿足了輕便性,兼顧了穩定性和快速響應性,同時還提高了轉向節能性。
2 EHPS系統數學模型
將轉向盤力矩引起螺母運動的力等效為螺桿對螺母的作用力,則EHPS系統可以分為機械轉向器、電機、轉向控制閥和控制器4部分。因此,為了便于研究,分別建立機械轉向器模型、電機模型、轉向控制閥模型和控制器模型,并在AMESIM中將各個模型連接起來進行仿真分析。
2.1 機械轉向器模型
本文研究的是循環球轉向器,忽略轉向系統的間隙和摩擦。模型中螺桿、螺母和齒扇間的運動如圖2所示。
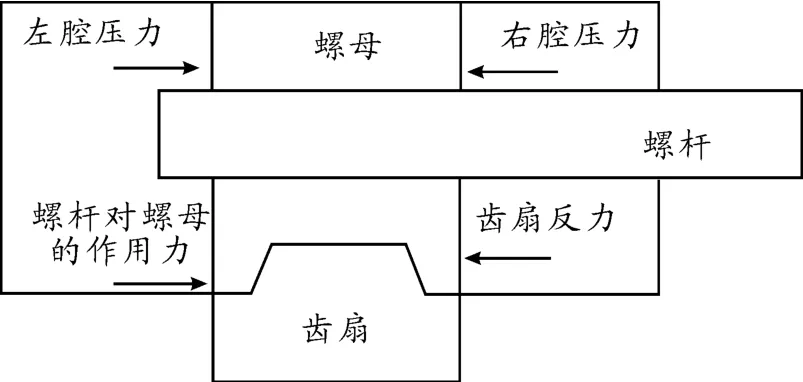
圖2 螺桿、螺母和齒扇間的運動
根據牛頓第二定律,螺母的受力平衡方程為

式(1)中:M1為螺母質量;x1為螺母位移;F1為左腔壓力;F2為螺桿對螺母的作用力;F3為右腔壓力;F4為齒扇反力。
螺母位移與轉向盤轉角之間的傳動關系為

式(2)中:S為螺桿導程;θ為轉向盤轉角。
助力缸左右腔壓力為

式(3)中:p5為左腔壓強;p6為右腔壓強;A為液壓油的有效工作面積。
2.2 電機模型
純電動公交客車采用三相異步電機,電機的每相電路如圖3所示。

圖3 三相異步電動機的每相電路
旋轉磁場的每極磁通與轉子電流相互作用產生三相異步電機的轉矩為

式(4)中:T為異步電動機電磁轉矩;K為與電機結構有關的常數;s為轉差率;R2為轉子每相繞組的電阻;U1為定子電路電壓;X20為n=0時的轉子感抗。
電動機轉差率由式(5)可得。

式(5)中:n0為磁場轉速;n為轉子轉速;f1為定子電路的電流頻率;pj為電機磁場極數對。
根據力矩平衡原理,電機運動方程為

式(6)中:T1為機械負載轉矩;T2為空載損耗轉矩;pa為液壓泵輸出壓強;q為液壓泵排量。
2.3 轉向控制閥模型
EHPS系統的轉閥式轉向控制閥等效模型如圖 4 所示[7]。
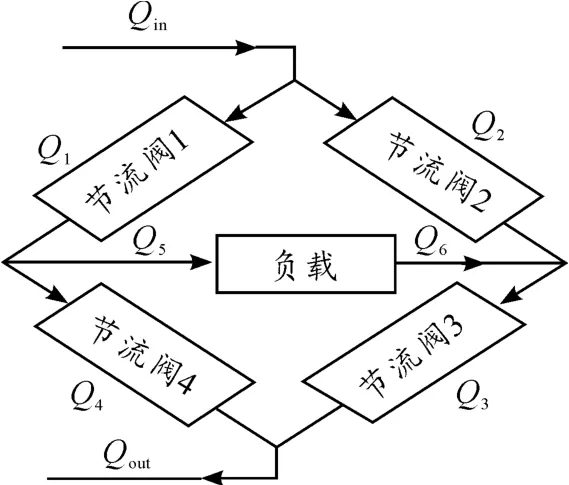
圖4 轉閥式轉向控制閥等效模型
根據圖4可得流量平衡方程:
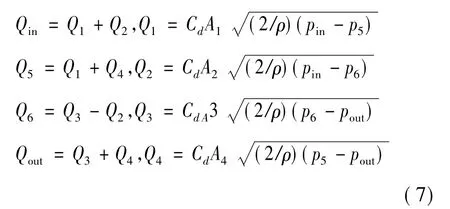
式(7)中:Qin、Qout分別為轉向閥的進油流量、出油流量;Qi(1,2,3,4)為流經節流閥 i的流量;Cd為流量系數;Ai(1,2,3,4)為節流閥 i的節流面積;ρ為液壓油密度;pin、pout分別為轉向閥的進油壓強、出油壓強。
2.4 控制器模型
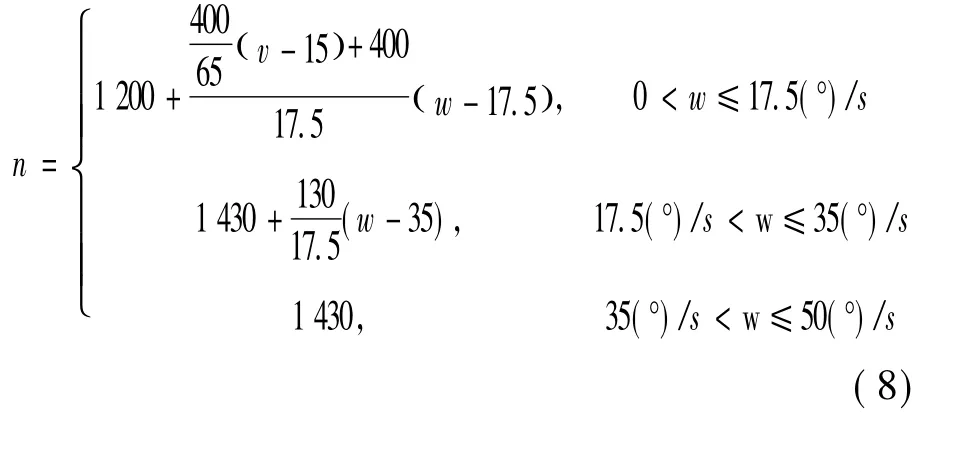
EHPS系統中的變頻器接收前軸載荷傳感器輸入的信號,確定轉向電機最大轉速,再根據車速確定客車直線行駛時的電機轉速。客車轉向時,變頻器根據轉向盤角速度計算出電機所需轉速并且通過PID控制[10]使電機準確、快速地達到目標轉速,從而實時改變助力大小,并改善節能性。根據不同的前軸載荷,利用分段擬合的方法分別作電機轉速與車速和轉向盤轉速的關系。圖5為前軸載荷分別為47 500 N和70 000 N時三者關系的三次樣條插值圖[11],簡化成函數關系式為:電機轉速=f(前軸載荷,車速,轉向盤角速度)。其中前軸載荷在64 400~70 000 N范圍內。純電動公交客車以速度v(15 km/h<v≤40 km/h)在城區行駛時,電機轉速與車速和轉向盤角速度的函數關系為:
3 EHPS系統仿真與結果分析
以某款12 m純電動公交客車的EHPS系統為研究對象,在AMESIM中建立EHPS系統的仿真模型[10]。
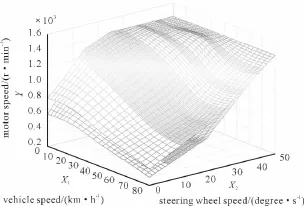
圖5 前軸載荷分別為47 500 N和70 000 N時電機轉速與車速和轉向盤轉速的關系
3.1 低速轉向助力特性分析
設定轉向盤力矩按正弦變化,頻率為0.2 Hz,幅值為12.5 N·m。圖6為客車車速v=10 km/h時,不同前軸載荷對應的轉向助力特性曲線。可以看出:隨著轉向盤力矩的增加,液壓助力也逐步增大;轉向盤力矩一定時,前軸載荷越大,EHPS系統所能提供的液壓助力也越大,從而改善了客車低速轉向輕便性。
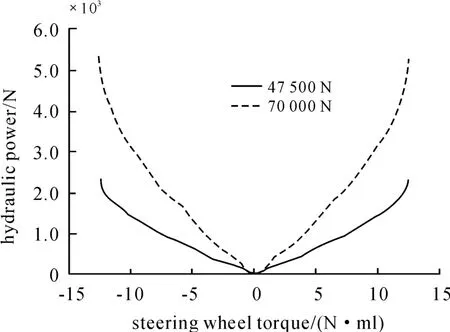
圖6 車速v=10 km/h,前軸載荷分別為47 500 N和70 000 N時的轉向助力特性
3.2 轉向節能性分析
設定轉向盤力矩為階躍信號輸入,階躍輸出值為12.5 N·m。圖7為客車車速 v=10 km/h時,不同前軸載荷對應的電機消耗功率。轉向時,客車EHPS系統根據前軸載荷變化實時控制電機輸出轉速。由圖7可知:轉向盤力矩一定時,前軸載荷越小,電機消耗功率越小,因此考慮前軸載荷變化的EHPS系統可提高轉向節能性。同時,電機響應時間均在0.2 s內,表明此EHPS系統能滿足助力響應快速的要求。
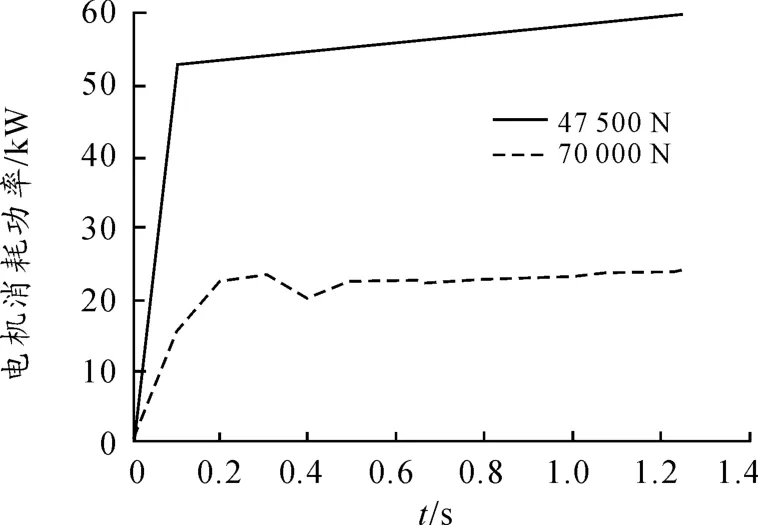
圖7 車速v=10 km/h,前軸載荷分別為47 500 N和70 000 N時的電機消耗功率
4 結束語
本文根據純電動公交客車EHPS系統的結構組成與數學模型,在AMESIM軟件中建立了仿真模型,設計了控制策略,并對客車在不同前軸載荷時的助力特性、節能性和響應性進行了仿真分析。仿真結果表明:客車EHPS系統能針對不同前軸載荷改變助力特性,從而改善了轉向輕便性,提高了節能性,為EHPS系統產品開發提供了理論依據。
[1]代國玉.KLQ6129GQEV2純電動客車總體設計[J].客車技術與研究,2012(6):21-23.
[2]徐本祥.NPS6100SHEV增程式電動客車設計[J].客車技術與研究,2011(6):14 -16,24.
[3]HUR J.Development of an electric motor-driven pump unit for Electro-hydraulic power steering with 42V powernet[J].International Journal of Automotive Technology,2010,11(4):593 -600.
[4]施國標,林逸,張昕.動力轉向技術及其發展[J].農業機械學報,2006(10):173 -176.
[5]Se-hyun Rhyu,Yong-kyoun Kim,Jun-hyuk Choi,et al.Development of an Electric Driven Pump Unit for Electro-Hydraulic Power Steering of 42V Automobile[Z].IEEE Digital Object Identifier.2007:791 -795.
[6]Zhu Ren-xue,Gao Lan-fang,Li Xue-zhi.Research on the energy-saving potentiality ofelectro-hydraulic Power Steering System based on energy flow[C]//2nd Internationl Asia Conference on Informatics in Control,Automation and Robotics.2010:415 -418.
[7]Roy McCann,Anh Le.Gain Scheduling Control in Commercial Vehicles with Electro Hydraulic Power Steering[J].SAE Paper,2008(1):2703.
[8]蘇建寬,王繼磊.電動液壓助力轉向系統控制策略及其能耗分析[J].機械設計與制造,2012(1):126-128.
[0]陳勇,何仁.電動液壓助力轉向系統仿真及試驗研究[J].液壓與氣動,2009(10):29 -32.
[10]趙萬忠,施國標,林逸,等.電動客車電動助力轉向回正控制策略[J].江蘇大學學報:自然科學版,2011(1):28-31.
[11]周宇,陳勇,劉文光.電動液壓助力轉向系統的協同仿真虛擬試驗[J].機械設計與制造,2009(7):109-111.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
